一种基于循环阈值的海上固定目标清洗方法
2019-08-11李雪腾王海鹏林雪原黄友澎柳华林
李雪腾,王海鹏,林雪原,黄友澎,柳华林
(1.海军航空大学,山东 烟台264001;2.武汉数字工程研究所,武汉430074)
近年来,态势分析[1-6]是多源信息融合领域中最热门的研究内容之一。自20世纪70年代以来,许多国家从理论体系和实际应用等方面对态势分析进行了研究和开发,取得了很大的进展。例如,在海湾战争使用的全源分析系统(ASAS)[7-8]实际上就是面向多源信息融合和态势分析的群体决策支持系统。由于态势分析是对多源数据的高层次关系进行提取与处理,更接近于人的思维过程,要涉及众多的因素、参数、规则和观点,且进行的各类运算又多半都是基于领域知识、模拟人脑思维的符号推理,所以态势分析的处理过程较为复杂,需要耗费大量的时间,在复杂环境下快速、准确地建立分析模型也是比较困难的。
因此,在建立海上实时态势、开展态势分析的过程中,将目标海域内对态势分析影响较小的海上固定目标进行清洗[9]是一项十分重要的工作。其中,涉及的海上固定目标主要包括目标海域内的固定岛屿和海上漂浮物(如海洋浮标、灯浮标、大型漂浮物垃圾等)。该方法可以降低数据处理的复杂程度、缩短对海上目标航迹的分析时间,有利于提高态势分析的效率和直观性。
由于海上复杂电磁环境、杂波和噪声等因素的影响,以及探测数据时产生的量测误差、人工误差,多源传感器在不同时刻、探测同一固定目标的量测数据也有所不同,甚至出现偏差较大的异常点。现有的固定目标清洗方法,大多是通过比较目标位置信息的变化范围与传感器探测误差范围的大小,来判断该目标是否为固定目标。该方法鲁棒性较低,对要处理的数据信息的准确性要求较高,不适用于海上复杂环境的数据处理。因此,面向海上复杂环境、结合态势分析的需求,为了排除自然因素、量测误差及异常数据产生的干扰,本文针对现有固定目标清洗方法的局限性,提出了一种基于循环阈值[10]的海上固定目标清洗方法,通过循环阈值过程实现对海上固定目标的清洗。
1 现有固定目标清洗方法
现有的固定目标清洗方法,其思想大多是比较目标位置信息的变化范围是否小于传感器探测误差的范围。若目标位置信息的变化范围小于传感器探测误差的范围,则该目标为固定目标;反之,则为移动目标。具体方法流程如下:
Step 1:设目标航迹样本数据集T={T1,T2,…,Tn},n为样本数据集总数,每条目标航迹样本Ti(i=1,2,…,n)中含有m个数据点。假设T(i,1,:)为第i条航迹中所有m个数据点的横坐标,T(i,2,:)为第i条航迹中所有m个数据点的纵坐标。找出每条目标航迹Ti(i=1,2,…,n)的m个数据点中横坐标的最大值Tix,max、最小值Tix,min和纵坐标的最大值Tiy,max、最小值Tiy,min。其中:


Step 2:计算每条目标航迹Ti(i=1,2,…,n)的m个数据点横坐标的极差Rix和纵坐标的极差Riy。其中:
Step 3:设定合适的距离阈值α。比较每条目标航迹Ti中数据点的横、纵坐标极差Rix、Riy与距离阈值α的大小,若满足Rix≤α且Riy≤α,则该航迹目标Ti(i=1,2,…,n)为固定目标;若不满足,则为移动目标。
通常,距离阈值α即为传感器探测误差的范围。
2 基于循环阈值的海上固定目标清洗方法
经实验检验,上述方法在某些特定环境下可以实现对海上固定目标的清洗,但不能排除异常跳变数据的干扰。例如,对某一海上固定目标的量测数据中,若存在一个偏差较大的异常数据,使得该目标航迹中数据点的横、纵坐标极差不能同时满足不大于设定阈值,按上述固定目标清洗方法,则判定该目标为移动目标。由此可得,该方法具有较大的局限性,对输入的样本数据的准确性要求较高。
本文对上述固定目标清洗方法进行优化,提出了一种基于循环阈值的海上固定目标清洗方法。该优化方法的核心内容在于循环阈值过程,通过循环比较数据点到均值点间距离和阈值的大小,最终实现了对数据集中固定目标的清洗。其具体流程可以归纳如下。
Step 1:设目标航迹样本数据集T={T1,T2,…,Tn},n为样本数据集总数,每条目标航迹样本Ti(i=1,2,…,n)中含有m个数据点。找出每条目标航迹Ti(i=1,2,…,n)的m个数据点中横坐标的最大值Tix,max、最小值Tix,min和纵坐标的最大值Tiy,max、最小值Tiy,min。
Step 2:为了排除异常跳变数据对清洗结果产生的较大干扰,去除每条目标航迹Ti(i=1,2,…,n)的m个数据点中横坐标的最大值Tix,max、最小值Tix,min,对剩余数据点的横坐标值求平均,得到横坐标均值Tix,av;同理可得纵坐标均值Tiy,av,由此得到均值点坐标(Tix,av,Tiy,av)。其中:

Step 3:计算每条目标航迹Ti(i=1,2,…,n)中的每个数据点Ti(p)(i=1,2,…,n;p=1,2,…,m)到均值点(Tix,av,Tiy,av)的欧式距离di(p)。


3 实验验证分析
为了验证本文提出的海上固定目标清洗方法性能,在一个军用场景的仿真数据集上进行实验并对结果进行分析,通过仿真的多维航迹数据来模拟战场目标的活动情况,对目标航迹数据进行处理。
3.1 数据集
目标航迹数据通常是由多维航迹数据点组成的多维序列,如在广播式自动相关监视系统ADS-B[11-12]中,航迹数据通常包括飞机编号、时间、经度、纬度、高度、速度及航向等多维特征。
本实验参考了文献[13-14],利用Piciarelli公开的目标航迹生成程序[15],生成含有二维位置信息的目标航迹数据;然后,结合海上复杂环境,人为添加了目标的速度、航向、红蓝属性和类型等信息,构造出一个多维目标航迹仿真数据集。
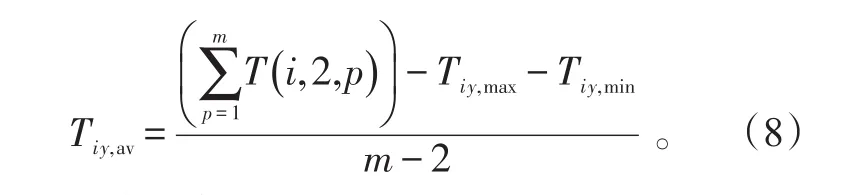
本实验数据集的仿真环境假设为某450 n mile×450 n mile的宽阔海域,包括代表4种目标行为规律的120条多维航迹数据、7条不规律的航迹数据、70个固定岛屿目标和5个海上漂浮物,共202个海上目标的航迹数据。假设每10min更新一次战场态势信息,故每条目标航迹数据均由36个数据点组成。每条目标航迹数据在传统二维位置信息的基础上,结合现代海战场实际,人为添加了目标的日期、初始速度/加速度信息、红蓝属性信息和类型信息等多维信息,计算得出目标航迹的速度、位置和航向特征。最后,对修改后的202条航迹随机排序,就得到了202×10×36的多维目标航迹仿真数据集,如图1所示。
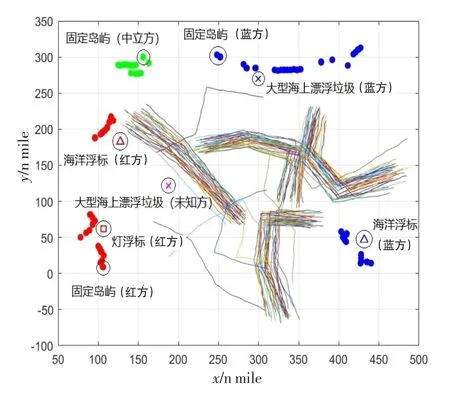
图1 海上作战态势仿真数据集中全部目标航迹分布图Fig.1 Plot of all trajectories in maritime combat-situation simulation dataset
其中,设定G={G1,G2,G3,G4,G5,G6,G7}为7个固定岛群数据集,岛群G1~G7分别包含8、7、7、5、6、21、14个固定目标岛屿,设定相应的二维位置信息。须注意,多源传感器探测到的目标数据中包含随机误差、量测误差以及受传输干扰产生异常跳变等。因此,针对同一固定目标岛屿,每个更新时刻的量测数据都会有所不同,存在细微偏差。根据战场仿真环境设定,G1~G3为红方岛群,G4~G6为蓝方岛群,G7为中立方岛群,故将G1~G3中22个固定目标岛屿的属性标签设置为0(红方),G4~G6中33个固定目标岛屿的属性标签设置为1(蓝方),G7中15个固定目标岛屿的属性标签设置为2(中立方)。根据属性标签不同,分别用红、蓝、绿色的实心圆来标识红方、蓝方和中立方的固定目标岛屿。
另外,须注意海上漂浮物的运动规律近似于固定目标。海上漂浮物主要包括海洋浮标、灯浮标和大型海上漂浮垃圾等。其中,海洋浮标和灯浮标是以锚和锚链固定在海洋中的观测或助航工具,其量测数据变化范围略大于固定岛屿,但始终活动在固定阈值范围内;大型海上漂浮垃圾,随洋流在海面上缓慢移动,在较短观测时间内(如一天)位置变化范围极小、近似于固定目标。其属性标签分为红方(0)、蓝方(1)、中立方(2)和未知方(3),类别标签分为海洋浮标(101)、灯浮标(102)和漂浮物(103)。根据属性和类别标签的不同,分别用红、蓝、绿、粉色的符号来标识漂浮目标的属性信息,用三角形、正方形、叉号符来标识各类别的漂浮目标。
红、蓝双方舰船目标的航迹数据,根据目标的红蓝属性、类型,由指定颜色、形状的航迹曲线表示,在此不做说明。
3.2 实验结果分析
为了验证现有固定目标清洗方法的局限性,本实验场景选用图1所示海上作战态势仿真数据集,对其中某固定岛屿的一个数据点进行更改,更改后的该岛屿数据点分布情况如图2所示。

图2 更改后的某岛屿数据点分布图Fig.2 Plot of a modified island data point
确定参数距离阈值α1和比例阈值α2的取值,分别利用第1节提到的现有固定目标清洗方法和第2节提到的基于循环阈值的海上固定目标清洗方法,对其进行固定目标清洗,输出清洗后的目标航迹分布图像,结果如图3、4所示。由实验结果可得,在距离阈值α1参数相同的情况下,基于循环阈值的海上固定目标清洗方法可以检测出所有海上固定目标并进行清洗;而现有的固定目标清洗方法只能检测出固定岛屿、不能识别出海上漂浮物目标。

图3 (现有方法)固定目标清洗后的目标航迹分布图Fig.3 Plot of trajectories after the existing fixed-target cleaning method

图4 (基于循环阈值)固定目标清洗后的目标航迹分布图Fig.4 Plot of trajectories after the fixed-target cleaning methods based on cycle threshold
针对图2所示的更改后某岛屿数据信息、有一异常跳变数据点,现有的方法无法识别该固定岛屿为固定目标;而基于循环阈值的海上固定目标清洗方法可正常识别该固定岛屿。
综上可验证,现有的固定目标清洗方法具有一定的局限性,对输入的样本数据的准确性要求较高;且2种方法在距离阈值α1参数相同的情况下,现有方法的处理效果较差。
度量固定目标清洗方法效率的主要标准是能否把多源数据集中的所有固定目标都检测出来,因此本实验通过计算召回率(Recall)R和准确率(Precision)P[16]、将清洗后正确识别出的固定目标数量与理想结果基准进行比较,来对固定目标的清洗效果进行评估。定义如下:
1)召回率R是指被正确识别的固定目标数量与实际固定目标数量的百分比,即

2)准确率P是指被正确识别的固定目标数量与识别出的固定目标数量的百分比,即

下面通过实验的方法讨论参数距离阈值α1和比例阈值α2的取值情况。比例阈值α2是用来判定一条目标航迹Ti(i=1,2,…,n)中的计数点数q与所有数据点数m的比值大小,通常取0.8≤α2<1。固定目标的位置信息变化范围很小,故距离阈值α1在0到1范围内均匀取20个点进行实验。在α2取值固定的情况下,计算召回率R和准确率P随距离阈值α1取值的变化情况,并绘制曲线图,如图5、6所示。
图5 召回率R随距离阈值α1的变化情况Fig.5 Plot of recall ratio R dependent on the value ofα1
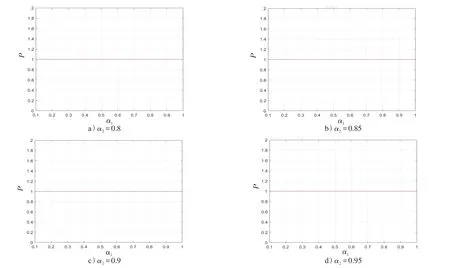
图6 准确率P随距离阈值α1的变化情况Fig.6 Plot of accuracy P dependent on the value ofα1
由图5分析可得,当比例阈值α2=0.8时,若距离阈值α1取值α1<0.3,则实验方法只能检测出固定岛屿和部分漂浮物,无法检测出全部固定目标;若距离阈值α1取值α1≥0.3,则实验方法可正确识别出所有固定目标并进行清洗。当比例阈值α2≥0.85时,若距离阈值α1取值0.1≤α1<0.4,则实验方法只能检测出固定岛屿和部分漂浮物,无法检测出全部固定目标;若距离阈值α1取值α1≥0.4,则实验方法可正确识别出所有固定目标并进行清洗。由图6可分析得,固定目标清洗的准确率不受距离阈值α1和比例阈值α2的取值影响,无论二者取何值,该实验方法识别出的固定目标均为正确的。
取α1=0.4、α2=0.9,分析该海上固定目标清洗算法的性能及随着数据规模的变化情况[17-18]。在逐渐增大数据规模的情况下对该仿真数据集进行固定目标清洗,计算并绘制了召回率R和准确率P随着数据规模变化的曲线图,如图7所示。其中,图7的横轴表示数据集规模的变化,数值大小是图1所示仿真数据集中数据量的倍数。图7 a)为固定目标清洗的召回率R随数据集规模变化的曲线,图7 b)为固定目标清洗的准确率P随数据集规模变化的曲线。图7可看出,在该军用场景中,随着数据集规模的不断增大,本文提出的基于循环阈值的海上固定目标清洗方法,依然可以很好地对数据集中的固定目标进行检测并清洗。
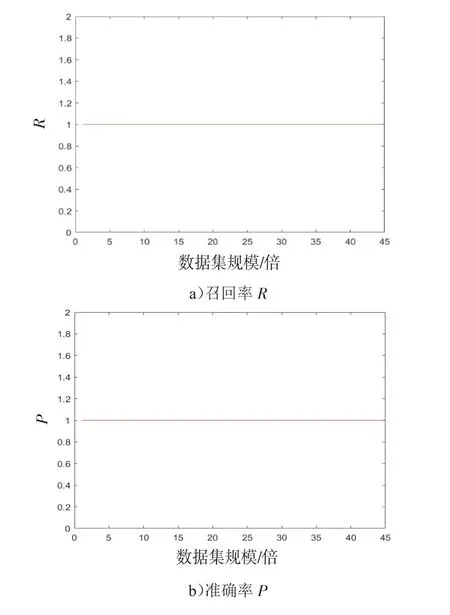
图7 召回率和准确率随数据集规模的变化情况Fig.7 Plot of recall and accuracy dependent on the value of dataset size
4 结论
本文针对海上态势分析过程中出现的电磁环境复杂、数据量巨大等问题,结合实际应用需求,提出了一种基于循环阈值的海上固定目标清洗方法,通过循环阈值过程,实现对复杂环境下海上固定目标的检测和清洗。在一个仿真军事场景上进行了实验分析,并计算召回率R和准确率P对实验结果进行评估、分析。结果表明,该方法能够排除自然因素、量测误差和异常跳变数据的干扰,有效检测出样本数据集中的固定目标,并将目标海域内的固定目标和移动目标分类存储。该方法剔除了目标海域内对态势生成影响较低的固定目标,可有效缩短数据处理时间、降低态势分析的复杂程度,大大提高了海上态势生成的效率和准确性,具有重大的实际意义。
