电力多旋翼无人机巡检安全间距保持系统
2019-08-10刘风春
摘要:针对电力多旋翼无人机巡检较高的安全性要求,提出基于klaman滤波融合和模糊控制技术的电力多旋翼无人机巡检安全间距保持系统。该系统主要依据GPS、超声波测距模块、电磁场强度测距模块等进行数据采集,并通过klaman滤波数据融合[4][5]和模糊控制[1]技术计算、监测无人机与线路间距离。通过对系统的实验,结果表明设计的安全间距保持系统安全可靠。
Abstract: For power multi-rotor UAV patrol high security requirements,this paper proposed keeping safety distance system based on kalman Filtering Fusion and Fuzzy Control Technology. The system is collecting data mainly based on GPS, ultrasonic ranging module, electromagnetic field strength ranging modules,and monitoring the distance between the UVA and the line through kalman Filtering Fusion and Fuzzy Control Technology. The results showed the keeping safety distance system proposed in this paper is secure and reliable.
关键词:超声波;klaman滤波融合;模糊控制;无人机
Key words: ultrasonic;kalman filtering fusion;fuzzy control technology;UAV
中图分类号:V279+.2 文献标识码:A 文章编号:1006-4311(2019)17-0217-03
0 引言
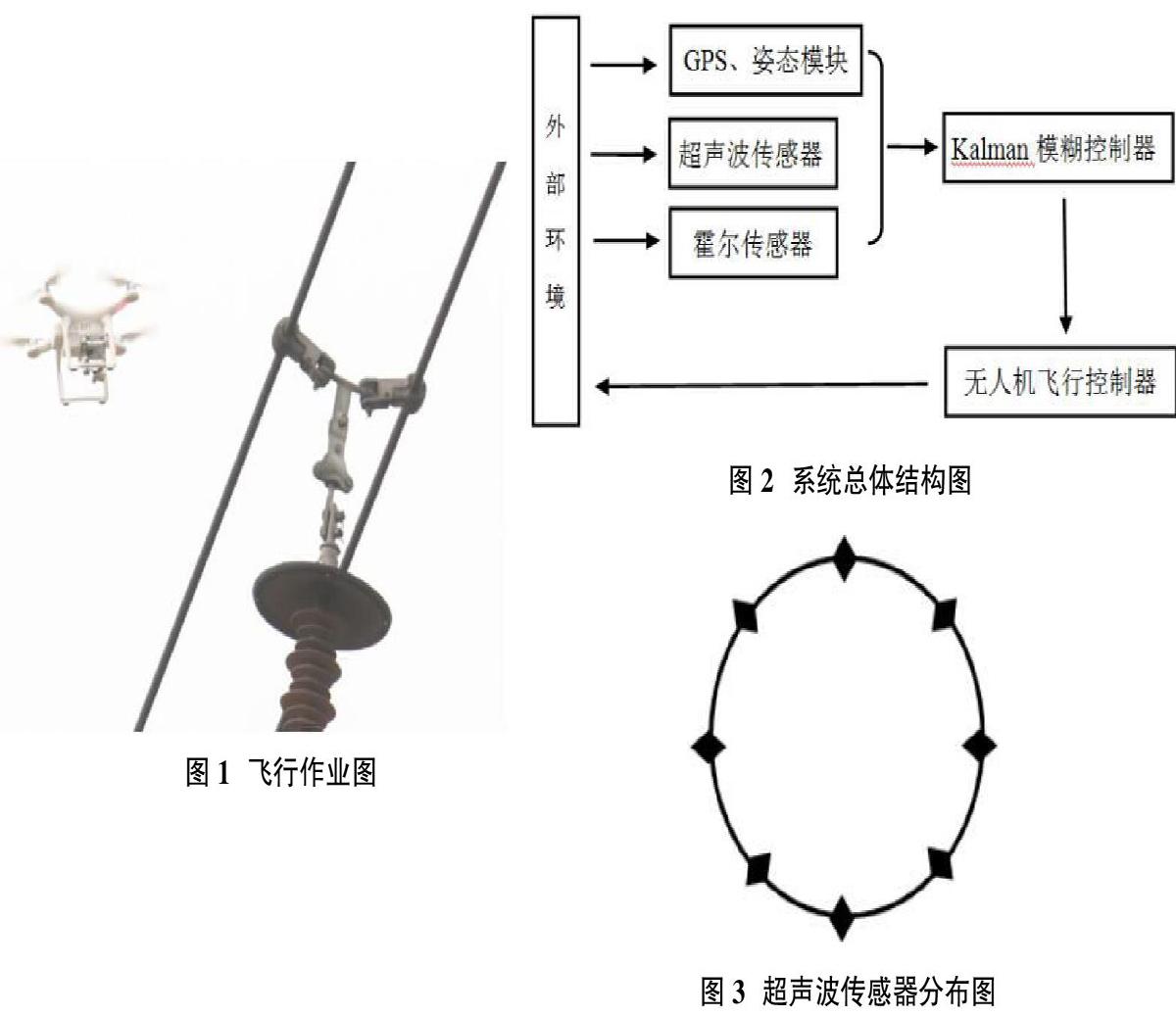
对于电力多旋翼无人机巡检而言,由于其载重能力有限无法安装大载重、远距离机载检测装置,所以需要沿线路近距离飞行悬停检测,如图1。与输电线路保持安全距離飞行是多旋翼无人机在电力巡检中重要的安全保障之一,同时也是电力多旋翼无人机巡检的强制要求。随着近几年无人机行业的快速发展,在电力巡检中多旋翼无人机以其成本低、操作简单、使用灵活、方便运输等优势得以广泛使用。传统的无人机与输电线路安全间距保持方法为GPS定位控制,缺点在于其精度低、抗风性差、实时修正能力弱等原因,使其安全系数较低[2],优点在于其载重轻,有效减小飞机负载,延长续航时间。综合分析传统安全间距保持方法的优缺点,本文应用klaman滤波融合和模糊控制技术,设计了一种新型的安全间距保持系统来实现多旋翼无人机巡检的实时性和准确性避障。相对于传统的安全间距保持系统,该系统能够实时、准确采集无人机与输电线路之间的距离,并通过快速计算和动作控制,从而实现无人机与输电线路的安全间距保持。
1 系统硬件结构组成
系统根据检测距离信号控制多旋翼无人机与输电线路之间距离,当到达一定范围时控制多旋翼无人机飞行速度,使其退出危险区域。使用GPS、超声波传感器和霍尔传感器分别检测多旋翼无人机与输电线路之间距离,将三路距离信号经过klaman滤波融合及信号处理后送至模糊控制器进行处理,输出飞行控制处理命令到飞行控制器,调节飞行姿态,从而改变两者之间距离到达安全范围。传感器实时检测两者之间距离,多旋翼无人机实时做出相应调整。为了满足超声波传感器360°检测,故采用如图3分布方式,且检测电场强度传感器放置在多旋翼无人机中心位置。
检测传感器包括超声波传感器和霍尔传感器两种。超声波传感器优点是控制简单、技术成熟、价格低廉,成为距离检测的常用传感器;缺点是超声波传感器利用物体上产生的反射超声波来检测距离,当两者水平成一定角度时,将会产生幻影[3]。霍尔传感器优点在于灵敏度高、体积小、适用于各种特殊设计要求;而缺点在于互换性差、信号随温度影响而变化、非线性输出等。
2 安全距离处理技术
2.1 kalman滤波融合技术
目前比较常用的滤波融合技术有综合平均法、贝叶斯估计法、D-S法、模糊逻辑法、神经逻辑法、kalman滤波法、专家系统方法等。kalman滤波经在控制领域得以推广后,便成为多传感器信息融合的主要技术手段之一,其基本思想是先分散处理,再全局融合,即以一个信号为主体,与其他信号两两结合,在其结合信号的基础上获得全局估计。本设计以超声波传感器信号为主体,GPS和霍尔传感器信号为辅助信号,进行滤波融合,首先将超声波传感器信号与其他两个信号结合,通过式(1)~(7)得到两个滤波后的信号。
离散系统状态方程:
其中Xk是系统的状态向量,Zk是系统观测序列,Wk是系统过程噪声序列,Vk是系统观测噪声序列, 椎k,k-1是系统的状态转移矩阵 祝k,k-1噪声输入矩阵,Hk是观测
矩阵。
基本Kalman滤波方程:
将X视为超声波信号输入值,Z视为GPS或霍尔传感器的输入值。在滤波处理之后,将两个滤波后的局部最优估计信号经过式(8)、式(9)进一步融合。全局最优估计方程:
由以上式(8)、式(9)得到kalman滤波融合的全局最优估计,将这个结果进行模糊控制处理。
当多旋翼无人机以不同的角度接近输电线路时,会出现两种情况:第一,当超声波传感器发出超声波的传播方向与线路垂直,则只需要进行Kalman滤波融合就可以得到准确的间距;第二,当超声波传感器发出超声波的传播方向与线路不垂直,则需要姿态模块确定飞行姿态,通过三角公式换算得到垂直离。
2.2 模糊控制技术
2.2.1 模糊控制器的输入、输出变量模糊语言描述
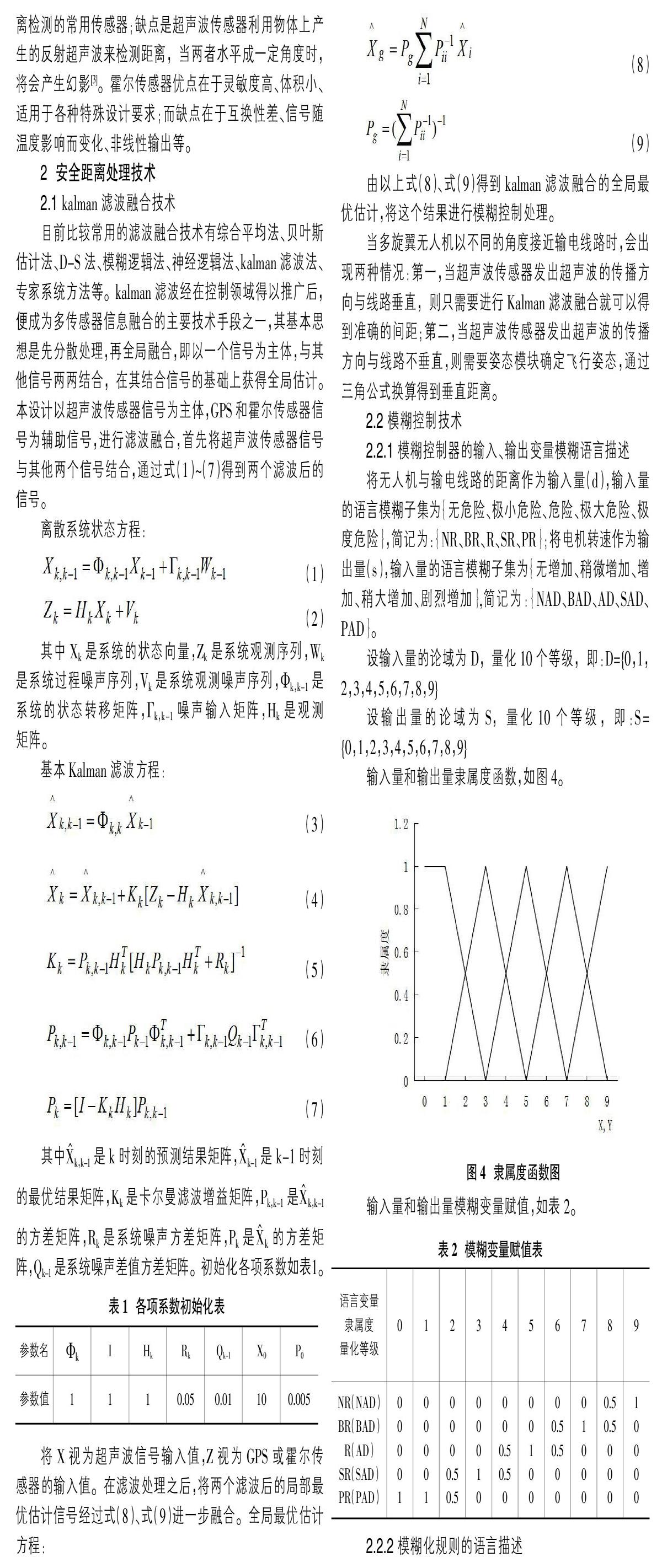
输入量和输出量隶属度函数,如图4。
输入量和输出量模糊变量赋值,如表2。
通过模糊化规则的语言描述,得其矩阵表达式:
2.2.4 模糊量的去模糊化
最大隶属度法是比较常用的反模糊化方法。其隶属度最大的元素就是精确化后对应的精确值。如果同时出现多个隶属度最大的元素,则取其平均值作为判决结果。
3 实验结果与分析
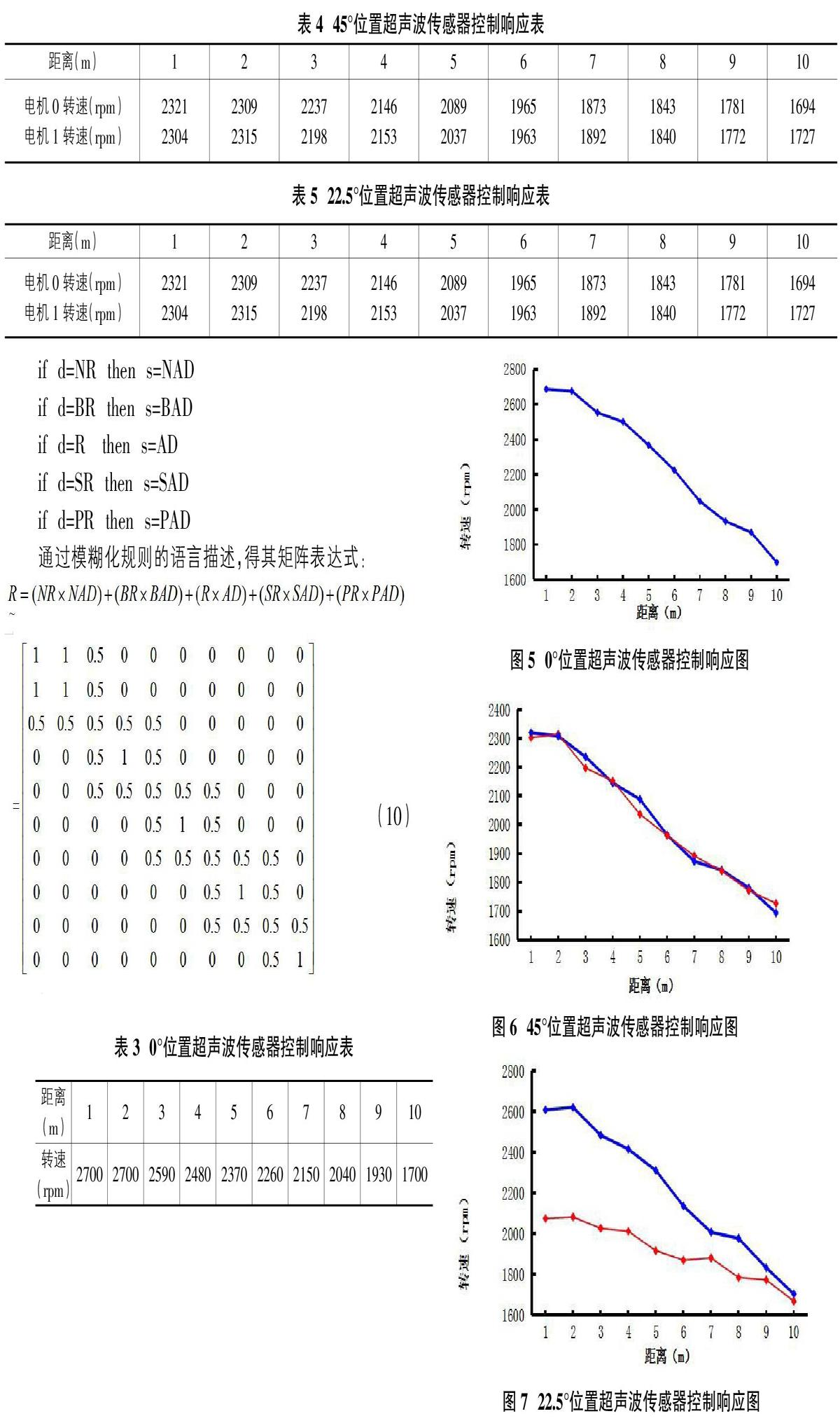
为了验证系统的可靠性,将多旋翼无人机搭载安全间距保持系统设备到空中指定位置,对系统的电机转速控制信号进行记录。表3、图5为0°位置超声波传感器靠近输电线路电机转速控制信号与距离之间关系。
在输电线路垂直方向在两个传感器之间时,其准确距离需要三角换算得到。例如在0°、45°之间,夹角为22.5°时电机转速控制信号与距离之间关系,数据如表5、图7所示。
由于室外试验,空中气流对多旋翼无人机飞行造成了一定影响,使电机转速与理论值有所差距。但是从图中可以明显看出,多旋翼无人机与输电线路之间距离越小电机转速越快,推动无人机快速倒退,使其远离危险区域,继续保持安全間距。
参考文献:
[1]李士勇.模糊控制[M].哈尔滨:哈尔滨工业大学出版社,2011,9:64-94.
[2]郑天茹,王海滨,刘俍,王骞,张晶晶.电力巡线无人直升机障碍规避系统[J].山东电力技术,2012(01):14-17.
[3]周兴超,段智敏.移动机器人避障的模糊算法[J].沈阳理工大学学报,2008,27(04):23-25.
[4]付梦印,邓志红,张继伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科技出版社,2003:16-25,158-160.
[5]冯智勇,曾瀚,张力,赵亦欣,黄伟.基于陀螺仪及加速度计信号融合的姿态角度测量[J].西南师范大学学报(自然科学版),2011,36(04):37-41.
作者简介:刘风春(1990-),男,山东济南人,本科,助理工程师,研究方向为电力巡检、新能源系统设计。