全站仪自动变形监测系统的分析
2019-08-10杨丽郑周超
杨丽 郑周超
摘要:借助于徕卡公司提供的二次开发环境GeoCOM,利用徕卡电子全站仪TCA2003 (测量机器人)的自动目标识别功能ATR(Automatic Target Recognition),开发了自动变形监测系统,将以往人工操作的测量工作转变为由计算机控制仪器从而完成自动测量。
Abstract: The Automatic Deformation Monitoring System is developed by using the ATR (Automatic Target Recognition) function of the TCA2003 electronic Total Station and the development environment GeoCOM of Switzerland Leica Company in this thesis. It uses the automatic surveying work instead of the manual work by computer.
关键词:测量机器人;自动目标识别;自动变形监测系统
Key words: survey robot;automatic target recognition;automatic deformation monitoring system
中图分类号:P258 文献标识码:A 文章编号:1006-4311(2019)17-0183-03
0 引言
地学和工程领域中存在很多变形,比如地壳形变、滑坡、采矿塌陷、高层建筑的摆动以及大坝变形等,一旦当变形量超过变形体所能承受的允许范围时,则往往会带来灾难性的后果。这些灾难性的后果往往会导致各个方面遭受巨大的损失,所以变形监测研究在国内外都受到了广泛的重视。
对于很多条件恶劣,不便于观测的目标物体来说,则需使用更智能化的自动变形监测,如本文所开发的自动变形监测系统。
1 系统硬件TCA2003全站仪及其开发环境介绍
1.1 测量机器人TCA2003全站仪功能简介
测量机器人也就是智能型的全站仪,是目前比较先进的全站仪。全站仪TCA2003内部安装了伺服马达,即可通过仪器内部的自动目标识别装置(Automatic Target Recognition)ATR发射出的激光束经过目标棱镜反射后由CCD相機接收,最终乐意实现自动寻找目标、自动精确照准目标。能在不用人操作的情况下,全天候的对建筑物进行检测,为建筑物的安全提供了保证。仪器的主要技术参数有测角精度±0.5″、测距精度±(1mm+1ppm)[1]。
1.2 TCA2003全站仪的开发环境
GeoCOM是专门为测量机器人研制的二次开发工具,用户可以利用此工具实现个性化的功能。GeoCOM总共有两种形式的通信方式[2]。一种是低级模式,就是ASCII码方式,另一种是高级模式,也就是常用的函数调用模式。GeoCOM还包含大量的函数种类和多种数据类型,以适应用户不同的需求,因此用途更加广泛,本文就是利用这种函数调用模式进行自动变形监测系统开发的。
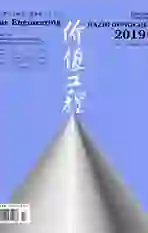
在GeoCOM函数调用模式下,借助于C/C++或者MS-VBA等平台利用该模式的开发程序实现用户所需的各测量功能[3]。下面介绍一下GeoCOM的函数功能,主要是接收和计算等的功能,参见图1。
下面主要介绍GeoCOM主要的几个模块:
①AUS模块主要是含有全站仪“FNC”键里参数设置函数。比如:气象状况参数的设置等。
②AUT 是该仪器的自动控制模块。主要利用该模块来控制全站仪进行自动目标的识别。
③BAP 是该仪器基本的应用模块。测量过程中主要用该模块来采集测量数据。
④BMM 是该仪器基本人工操作模块。可以控制一些基本的输入输出。例如设置嘟嘟嘟的警报声。
⑤COMF 是该仪器信息通讯模块。主要用来设置仪器的通讯参数,这些功能中许多与客户端和服务器都相关。
⑥COM 信息通讯。
⑦CSV 中心服务。这个模块提供关于TCA2003仪器中心或基本信息的功能。
⑧CTL 控制工作。此模块包含了系统控制工作。
⑨EDM 是该仪器电子测距模块。该模块主要用来测量距离。
⑩MOT 动力模块。这部分能够控制仪器的移动方向和移动速度。
{11}SUP 监控模块。控制TCA2003仪器一些输入值的功能,例如限制过低的温度。
{12}TMC 经纬仪测量和计算。获得测量数据的核心模块。
{13} WIR WI注册。此模块包含超大规模集成电路功能。
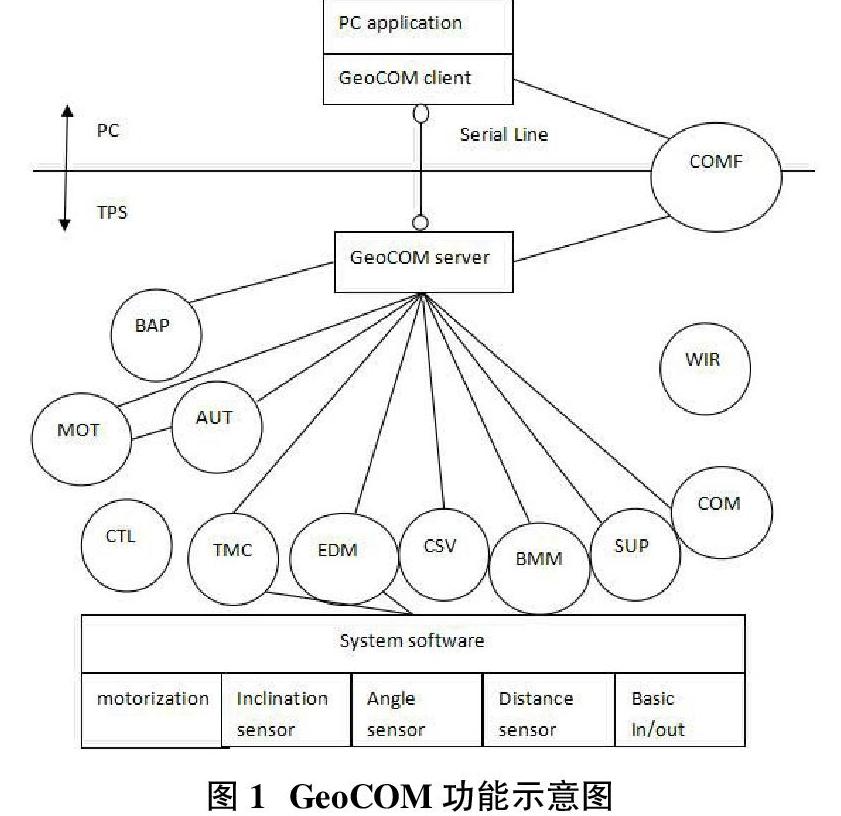
本文利用GeoCOM技术来开发测量程序的基本框架如下:
①初始化GeoCOM接口;
②打开TCA2003服务器端的连接,打开通讯端口,主要设置仪器和电脑的通讯参数;
③测量的主体部分,实现自动测量,这部分调用大量的GeoCOM中的函数;
④关闭服务器端的连接并退出GeoCOM。
对于整个GeoCOM技术的调用过程如流程图2。
2 自动变形监测系统的设计
本系统所使用的硬件是基于徕卡的TCA2003测量机器人,采用极坐标的测量方法,测定各变形点的三维坐标,同时将所测得的数据保存在设定的文件中,利用相关的分析方法对所采集的数据进行处理,作相关的变形分析以便于掌握变形体的运行情况[4]。监测系统的主要硬件组成如图3。
本系统所使用的操作系统为WindowsXP,开发语言主要是Visual C++6.0,主要技术利用了徕卡的GeoCOM技术。首先应将GeoCOM32.dll添加到工程GEOCOM_SAMPLE工程中,以便于后面的设计方便使用到GeoCOM中的函数。系统设计的大致流程如图4。
在该系统使用之前,首先对全站仪进行初始化。即设置计算机与全站仪之间的通讯参数,比如:通讯接口、波特率、通讯协议等基本通讯参数的设置。如果初始化成功,那接下来就应该进行点位首次学习过程,得到变形点的概略空间位置,为后续的自动变形监测提供基础数据,然后我们就可以根据首次学习的点位数据对这些特定的观测点进行重复观测,进而得到变形点的空间三维坐标,自动观测结束后,则通过用拟合的方法分析目标物体的变形情况。
图5是自动测量的详细过程和调用GeoCOM.dll中的函数。
3 应用实例
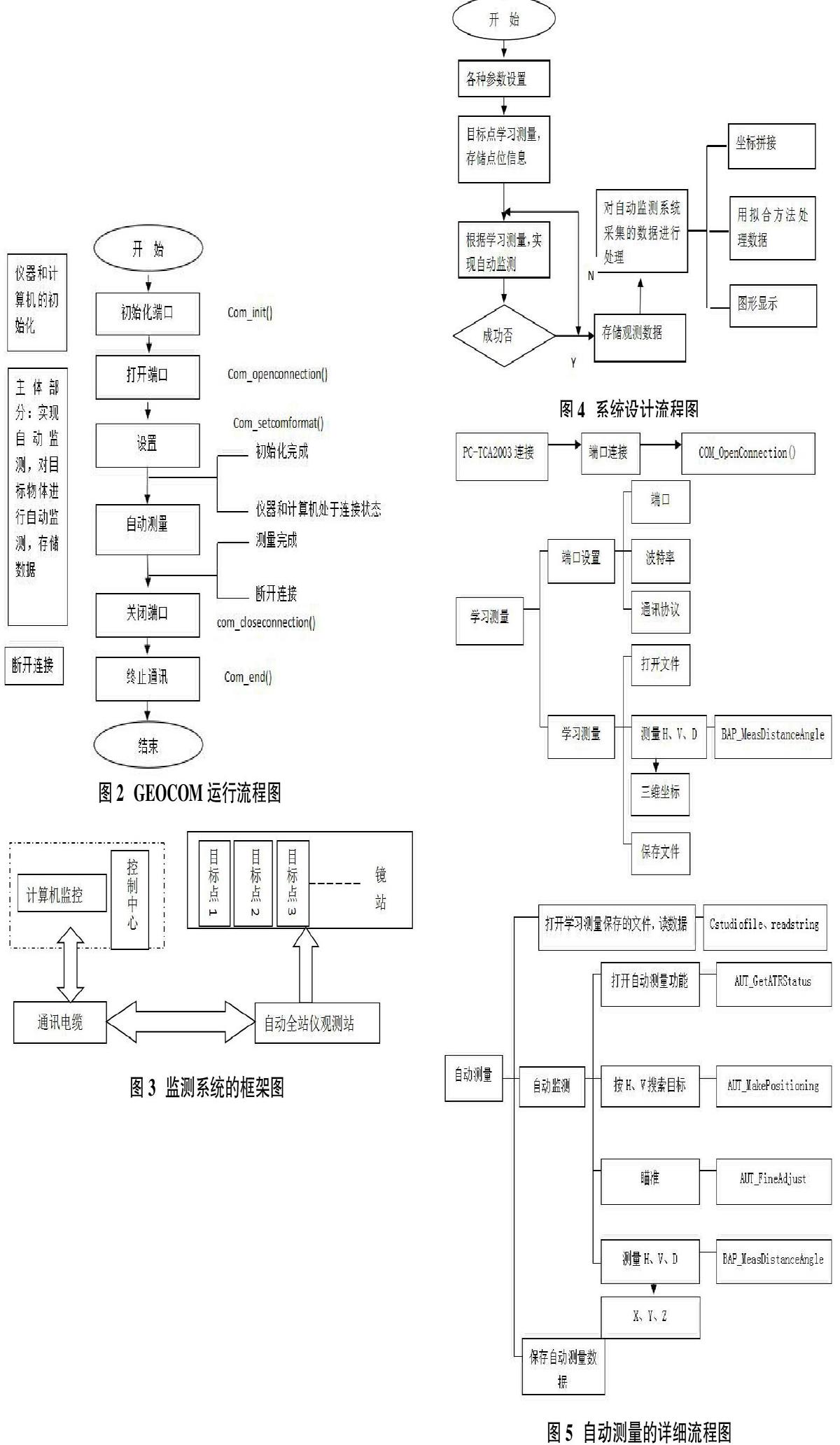
在仪器和计算机通过数据线连接完成之后,设置TCA2003处于ONLINE模式并运行程序,首先应确保仪器和计算机能够通讯,即分别设置通讯端口、波特率以及通讯协议如图6。
确保仪器与计算机连接后,即可进行测站点属性的设置,图7测站点的设置,图8目标高的设置,以便于学习测量获得目标点的概略空间位置。
设置完成之后,即可進行学习测量,当一个测站上的所有观测点都测完一遍之后,此时可以从程序所在的文件夹里打开文本文件“learningdata.txt”检查数据的正确性如图9所示。
学习完毕之后返回测量主界面,进行自动监测,根据弹出的输入的自动监测的对话框输入每个观测点的循环监测次数,完成自动测量。
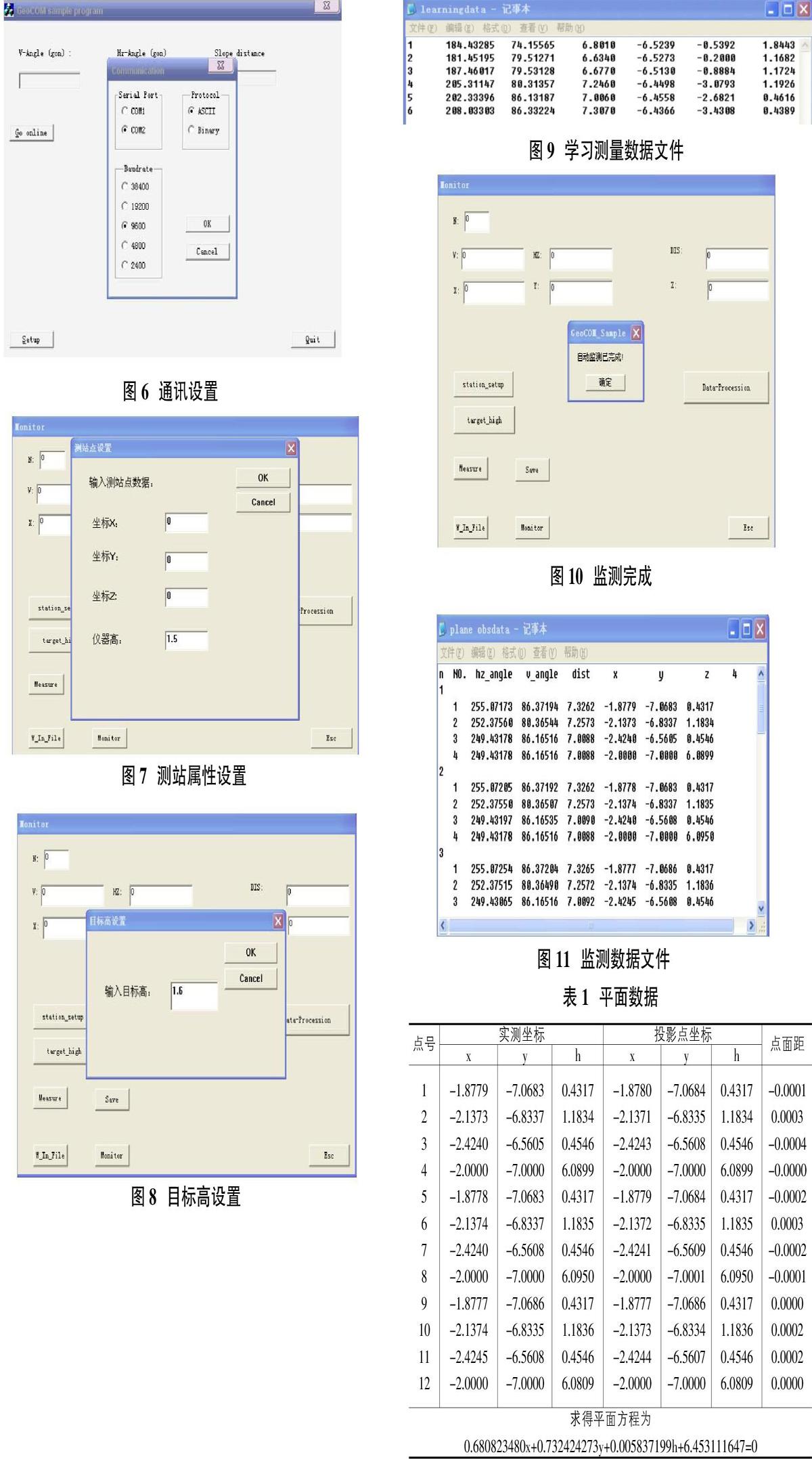
为了验证本程序的可实用性,在室内选择一平整的桌面安置四个棱镜,利用该系统测得桌面上的各点坐标,如表1。为了验证测得数据的准确性,用最小二乘拟合法对所得数据进行拟合,结果应为一平面。
4 结论
根据拟合所得结果可以看出目标物体确实是一个平面,说明该自动变形监测系统所测得的数据符合实际情况。
如果该系统经进一步的完善,用于监测大坝、桥梁等变形较大的建筑物时,将大大的提高工作效率、节省人力物力。
参考文献:
[1]尤相骏.测量机器人自动测量系统的应用与研究[D].同济大学,2002.
[2]张海玲.基于TCA2003全站仪的自动变形监测系统的研制[D].山东:山东科技大学,2005.
[3]蔡乾广.多测站自动变形监测系统的研发[D].山东:山东科技大学,2007.
[4]邬昱昆.苏通大桥超高索塔监测技术与数据处理研究——基于TCA2003的数据采集及分析系统的开发与研究[D].江苏:河海大学,2007.
作者简介:杨丽(1985-),女,江苏淮安人,上海市城市建设工程学校(上海市园林学校)讲师,硕士研究生,主要从事工程测量教学工作。