电动防爆无轨胶轮运输车牵引电机参数设计*
2019-08-08许联航
许联航
(神东煤炭集团技术研究院,陕西 神木 719315)
0 引言
电动防爆无轨胶轮运输车是一种用于煤矿井下,以蓄电池为动力源、牵引电机驱动的无轨式运输机械[1-3]。它具有绿色环保、噪音低、能耗低等优点,也存在能量有限、续航里程短等电动车固有缺点[4-5]。在防爆车辆重量大、现有锂电池技术难以突破的情况下,设计合理的电机参数、提高电驱效率是提高续航里程的有效途径。
电机驱动效率变化大、高效区有限,若电机参数设计不能匹配整车特性,车辆续航里程难以达到要求[6-7]。以神华神东集团与航天重工联合研发的WLL-5A电动防爆无轨胶轮材料运输车为例,对牵引电机技术参数进行分析、计算、优化,介绍了完整的计算推演过程。
1 总体动力性能指标
根据整车总体设计输入,整车动力性能参数见表1。
2 电机参数计算
电动机的参数选择直接影响整车的动力性和经济性。电动机功率、转矩越大,整车加速性和最大爬坡度越好。但也会增加电动机的体积和质量,正常行驶时电动机不能长时间在高效率区附近工作,这将影响整车的经济性,降低车辆的续驶里程。电动机的额定功率可由最高车速、爬坡度、加速时间来确定。
2.1 额定功率
由表1可知,本车满载最高车速30 km/h,空载最高车速40 km/h,根据最高车速vmax(km/h)确定的最大功率Pvmax为
(1)
式中:m—整车质量;g—重力加速度;f—滚动阻力系数;CD—风阻系数;A—分摊的临风面积;ηT—传动效率。
经计算,空载40 km/h时,Pvmax=28.3 kW,满载30 km/h时,Pvmax=29.1 kW。
其次,根据最大爬坡度确定的最大功率Pvmax为
(2)
式中:vi—额定爬坡度时的稳定车速,km/h;αmax—额定爬坡角,αmax=arctanλmax。
矿区一般最大爬坡度小于14%,取λmax=14%,vi=9 km/h,Pλmax=67 kW。经计算,Pmax≥67 kW。
最后,根据加速性能确定的最大功率Pmax_T。假设电动轮在无风的平直路面上全力加速,根据车辆加速过程动力学方程,加速过程中其瞬态总功率为
(3)
而加速过程中,瞬时车速可根据经验公式表示为
(4)
式中:vm—车辆的末速度,km/h;tm—车辆的加速时间,s;x—拟合系数,一般取0.5左右。
车辆在加速过程的末时刻,电动机输出的功率最大,因此加速过程中最大功率需求Pmax_T为
(5)
(6)
将经验公式(4)代入式(6)并化简得
(7)
将矿用车电动轮的相关数据带入式(5)中,根据从速度0加速到30 km/h所需时间小于25 s,得出驱动系统总功率Pmax_T=110 kW。
根据上述由动力性3项指标计算的各自最大的功率,驱动电机峰值功率Ppeak须满足上述所有的要求,即Ppeak≥max(Pvmax,Pλmax,Pmax_T),根据上式综合考虑矿用车电动轮的3项动力性指标,则可选电动轮电机的总额定功率Ppeak≥110 kW。考虑到该车辆由电池供电,续航里程是关键参数,故以Pλmax为额定功率选型,即Ppeak≥67 kW。在空间、质量满足总体设计要求的条件下,可适当增加额定值。
2.2 牵引电机转速范围和额定转速
由电动机的最高转速对应整车的最高速度,则电机所需最高转速为
(8)
式中:Vmax—车辆的最高速度;δ—电动轮减速比;D—轮胎直径。
经计算,nmax≥4 276 r/min。故电机最高可调转速应不低于4 276 r/min。而电动机最高转速与额定转速的比值也称为电机扩大恒功率区系数β,随β值的增大,电动机可在低转速区获得较大的转矩,有利于提高车辆的加速性和爬坡性能,但β值过大会导致电动机工作电流的增大,增大电机的尺寸和质量,因此β值一般取2~4。
车辆电机额定点的选取应根据实际工况的需要进行选择,该车型在井下作业,首先应满足额定14%坡度的爬坡能力,故额定点选在该工况。
14%满载爬坡牵整车总阻力为
(9)
整车电机所需转矩为
(10)
(11)
经计算ηr=964 r/min。
综上考虑,选取14%坡度爬坡最小牵引转矩Tr=664 N·m为额定转矩,额定转速964 rpm,其满足β≥4。
电机的峰值参数包括峰值转矩及峰值功率,为满足表1中的整车总体设计要求,满载最大爬坡坡度为25%,即牵引电机应具备一定的短时过载能力,本方案短时过载对电机峰值,由公式(10)、(11)可计算得25%坡度满载所需牵引转矩为1 091 N·m,故过载倍数为1.64,峰值转矩为1 091 N·m,峰值功率为110 kW。
2.3 电机功率分配方案
根据总体设计要求,车辆根据实时路况及车辆工作状态切换两驱/四驱牵引模式,且通过改变前后轴保有的电机功率比例,可有效提高电池能量利用率,增加续航里程;根据总体设计,当前后电机的扭矩与前后轴的负载率相匹配时,即前后载荷比与前后轴转矩比相同,电机的驱动能力与前后轴承受的载荷以及内部传递转矩零部件的强度等能得到充分的利用,同时有益于提高各部分的寿命以及降低整车结构件质量。则后轴电机扭矩占满负荷的比x确定所应遵守的原则是:要保证在各工况下,电机能够提供足够的驱动能力;要保证前后轮的路面附着率尽量接近。表2为前、后轴电机理论上最佳的转矩分配比。
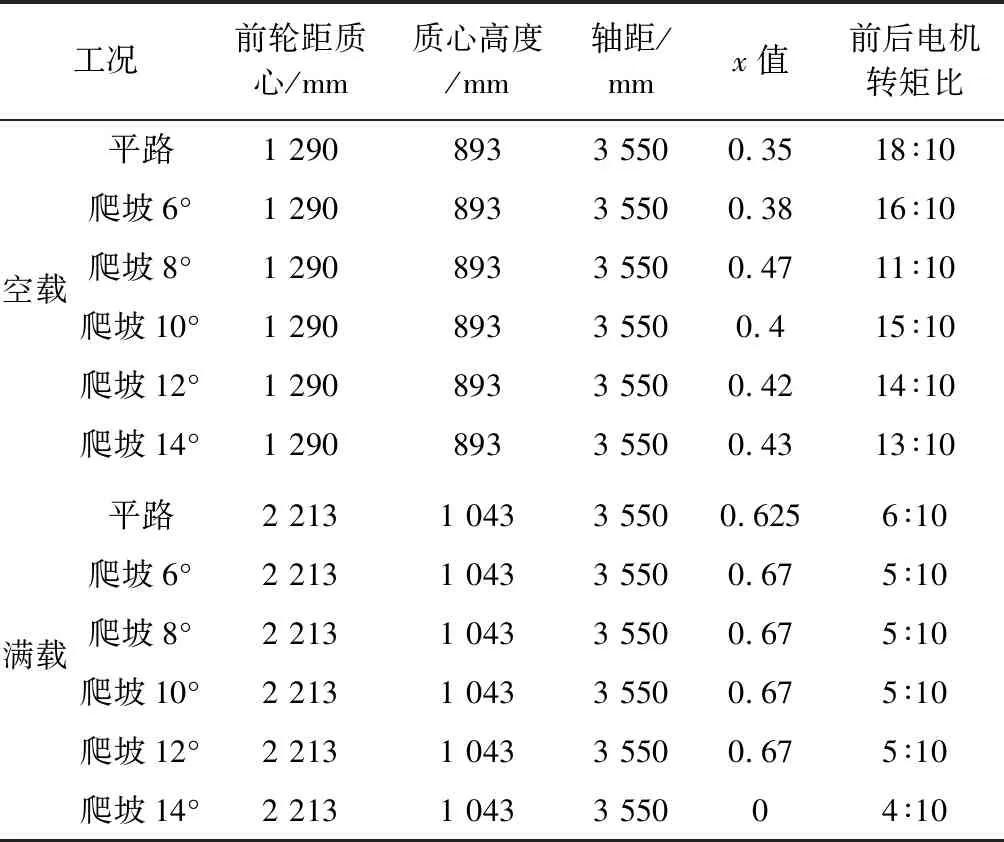
表2 前、后轴电机理论上最佳的转矩分配比
根据总体设计,车辆驱动采取分路况驱动模式,在x小于0.5时可采取前驱,当大于0.5时采取后驱,在超出前轴或后轴保有功率的工况时采取四驱。
为提高电机工作效率,前、后电机扭矩比要尽可能接近四驱工况下载荷分布值。使工作点尽量接近额定点,前后轴电机功率比选用和前后轴扭矩比相同,也就是在5∶10(0.5)和4∶10(0.4)之间。总电机额定功率为67 kW,因此前后轴额定功率比例在22 kW∶45 kW~19 kW∶48 kW之间。
2.4 电制动需求分析
根据实际矿区工况,车辆长时间运行在满载下坡工况,单独采用液压制动无法满足长时间满载下坡,造成制动器温度过高而失效,有必要增加电制动进行辅助制动,将电制动和液压制动并联使用可提高整车制动性能,满足满载长时间下坡工况。电制动系统由制动踏板给予输入指令,制动控制单元控制IGBT斩波,控制流过制动电阻的电流的大小。电制动能力应满足下坡时在不采取液压制动的条件时可匀速行驶。不同坡度时下坡车速与制动功率为线性关系,如图1所示。可根据下图取定电制动系统的功率并完成选型。
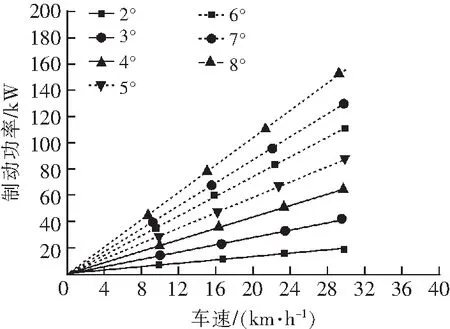
图1 不同坡度的匀速制动功率曲线
以10%的坡度为例,电制动所满足不同初始速度制动到匀速运行的制动功率如图1所示:初速3 km/h所需制动功率10 kW,6 km/h所需制动功率20 kW,初速8 km/h所需制动功率约30 kW,初速10 km/h所需制动功率约40 kW。
因制动电阻工作时为高电压、强电流状态,故需安装在防爆箱内部,箱体内部不能采用直接风冷散热,制动电阻的散热是关键问题。可采用热管散热器技术,该技术是一种成熟应用的方法,具有极高的导热性能,散热效果好,热阻小的优点。
考虑箱体内部散热能力有限,且电制动为辅助制动,理论值可初步选取10 kW的制动电阻及相应散热系统。
3 牵引电机参数选型
根据上述的结果分析,对牵引电机进行选型。
3.1 电机结构参数
该牵引电机为轮边安装方式,液压油冷却,受减速机和制动器的安装空间限制,根据总体设计方案,考虑安装距离,牵引电机轴向尺寸应小于450 mm(不包括伸出轴),考虑离地安全距离,径向尺寸应小于400 mm。在该尺寸内最大可选防爆电机外壳基座号为180,该机壳与减速机连接的法兰外径350 mm,机身直径350 mm,其连接方式及尺寸如图2所示。该基座号外壳可与总体所选减速机配合安装。前轴尺寸余量较大,可选择160基座,法兰外径350 mm,机身直径350 mm。
与电机生产厂家协调,该基座号电机最大额定功率可至25 kW,故后轴牵引电机额定功率选取25 kW。由于计算所得的整车牵引功率大于67 kW,考虑标准电机功率等级及前后轴载荷比值,前轴牵引电机额定功率选取13 kW,整车牵引功率76 kW。
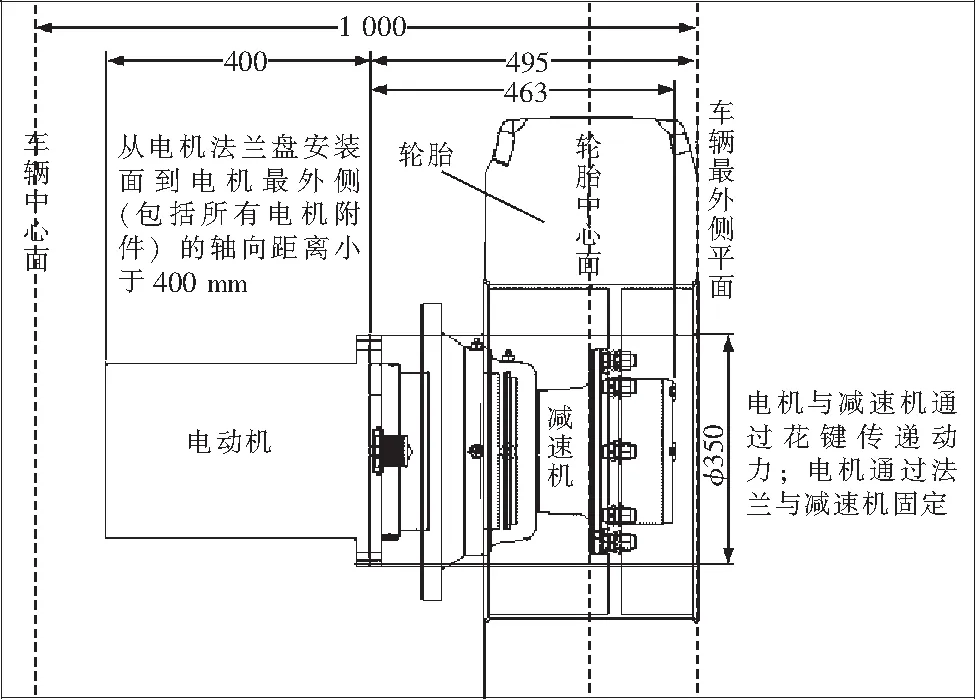
图2 后轴牵引电机与减速机配合安装模拟图
3.2 电机电气参数
由上述计算可得,电机额定转速为964 rpm。电机厂家一般生产额定转速750 rpm、1 000 rpm、1 500 rpm规格电机,故选电机额定转速1 000 rpm。由于最高可调转速为4 276 rpm,考虑参数余量,选取峰值转速4 500 rpm。
由电机的额定功率和额定转速可计算得额定转矩。由于电机所需过载倍数为1.64,实际电机可短时过载倍数一般大于2,实际选取牵引电机参数见表3。
4 牵引电机电气性能复核与整车试验
4.1 额定功率及峰值功率匹配
表3中选取两个额定功率为25 kW的牵引电机,前轴选取两个额定功率13 kW的牵引电机,整车总牵引电机功率为76 kW,满足整车所需的额定67 kW的要求。
表3中所选电机过载倍数为2,峰值功率为额定功率的2倍,为152 kW,运行时间1 min,大于所需110 kW的峰值功率。25%坡度爬坡所对应的峰值功率110 kW为所选电机方案额定功率的1.45倍过载,可满足3 min运行。
4.2 调速范围
表3中调速范围为0~4 500 rpm,调速范围大于最大车速40 km/h对应的4 276 rpm,可以满足最大车速要求。所选电机系统最高车速见式(12)。
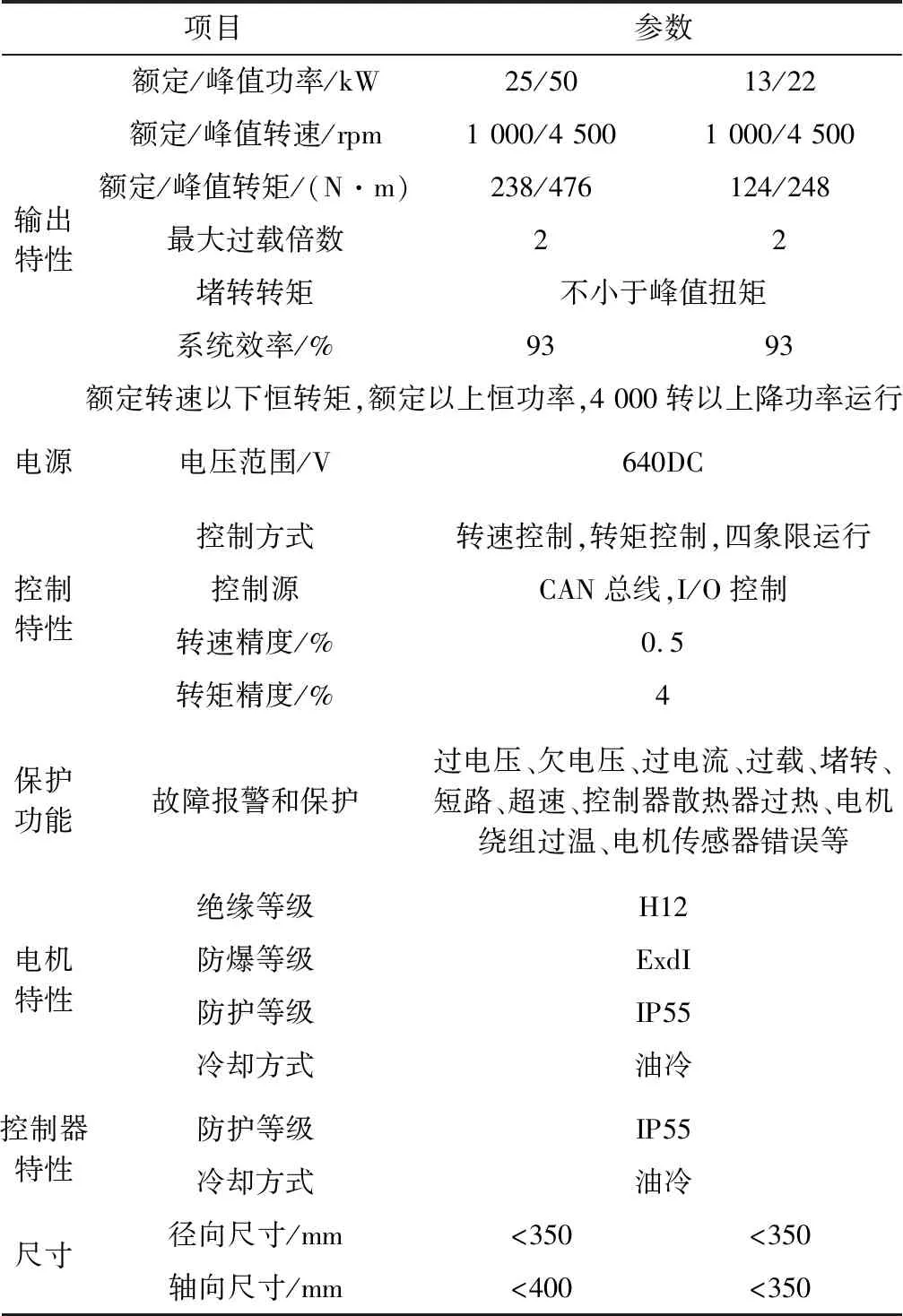
表3 牵引电机参数
备注:其中25 kW电机额定工作状态时连续运行时间不小于1 h;13 kW电机额定工作状态时连续运行时间不小于4 h;1.5倍过载连续运行时间不小于3 min;2倍过载连续运行时间不小于1 min;过载运行时间间隔大于20 min。
(12)
式中:n—电机最高转速4 500 rpm;i—传动比19.36。计算可得最高车速v=42 km/h,满足最高车速40 km/h的要求。
4.3 额定转速额定转矩匹配与整车试验
14%额定爬坡坡度时整车牵引转矩为664 N·m,所选电机系统四驱状态时额定转矩为724 N·m,大于所需额定664 N·m,故满足额定转矩需求,即可在14%额定爬坡坡度上长时间运行。
所选电机系统额定转速1 000 rpm,大于需求额定转速964 rpm,即整车可满足在14%坡度以9 km/h的车速上长时间运行。所选系统额定爬坡度的额定车速可由公式(12)计算得9.35 km/h。
4.4 峰值转矩匹配
选电机系统有2倍的过载能力,合理利用电机过载能力,可提高短时爬坡能力和加速能力。过载爬坡能力见表4。
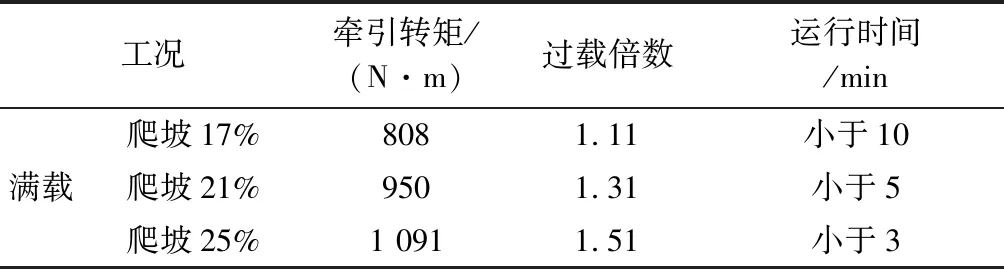
表4 过载爬坡能力
4.5 电机功率分配
选电机前轴额定功率共26 kW,后轴额定功率共50 kW,前后轴功率比为0.52,略大于理论设计值的0.4。选电机前轴额定转矩248 N·m,后轴电机额定转矩476 N·m,可满足的驱动模式见表5。
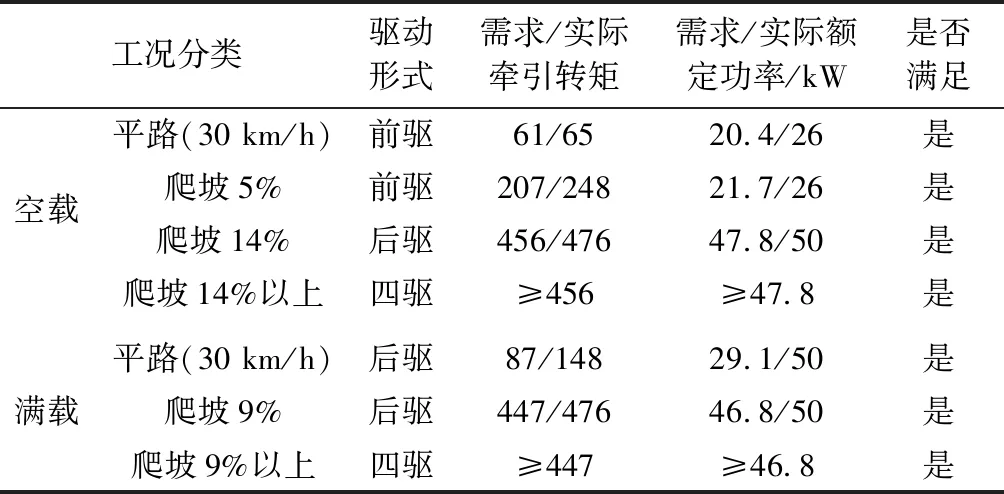
表5 实际驱动模式划分
由实际可安装空间约束及电机厂家的生产能力约束,所选13 kW/25 kW配比的电动机基本可以满足前后轴载荷比例的要求,在表中所述工况下可选择不同驱动模式。
4.6 整车试验
车辆在试验场进行8.6%、30%爬坡,空满载两驱/四驱、满载四驱越野路面续航里程等试验,试验情况现场如图3、4所示。

图3 长距离爬坡试验(8.6%、30%)
图5为车辆8.6%坡爬坡试验及数据,将油门踏板踩到底,整车行驶比较平稳,车速可持续稳定在20 km/h,电机扭矩输出满足爬8.6%坡度要求。
图6为车辆30%坡爬坡试验及数据,将油门踏板踩到底,整车缓慢平稳地驶上坡顶,坡道上车速可持续稳定在4.1 km/h,电机扭矩输出满足爬30%坡度要求。
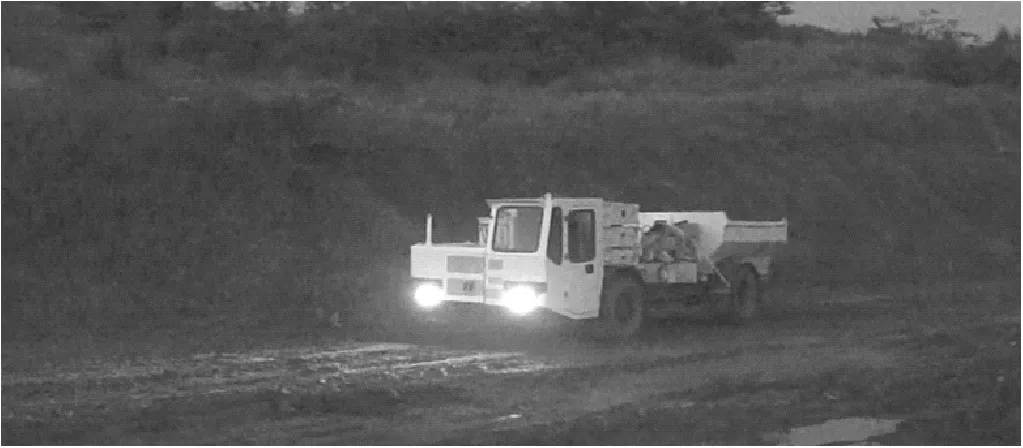
图4 泥泞越野路面试验
车辆进行续航里程试验,包括:空载两驱试验、满载两驱试验(一次全平路工况和一次含上下坡工况)、满载四驱试验(一次全平路工况和一次松软泥土路面、坡道、频繁启停车的复杂工况)。各次续航里程试验记录见表6。

图5 爬坡性能曲线(8.6%坡道)
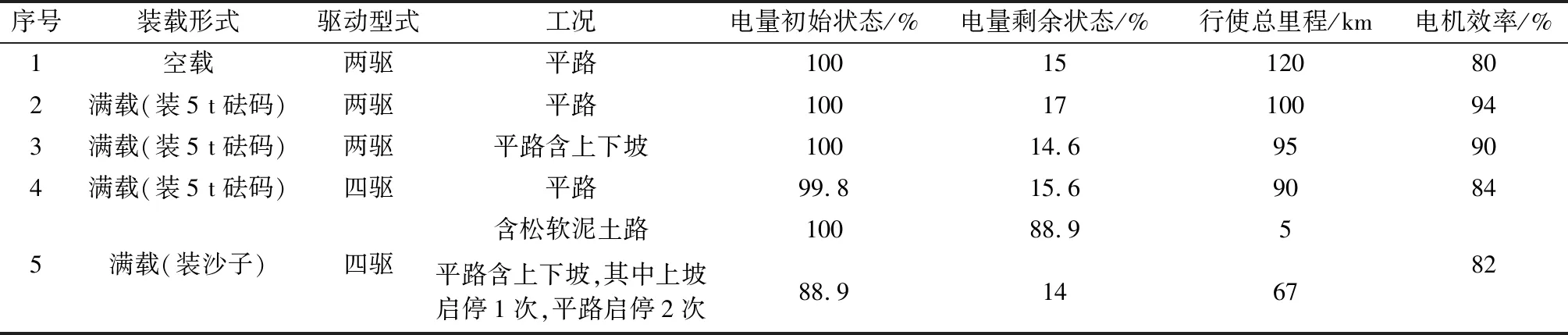
表6 续航里程总试验数据分析
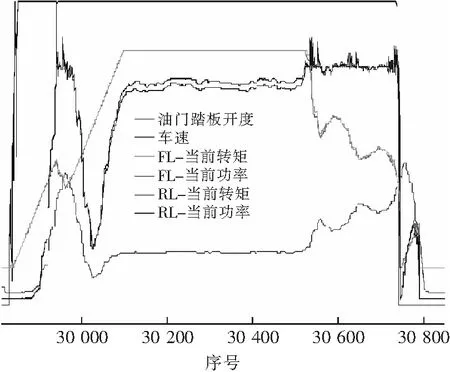
图6 爬坡性能曲线(30%坡道)
5 结语
系统论述了煤矿井下电动防爆无轨胶轮材料运输车牵引电机参数的设计、计算与优化推演过程,牵引电机在额定功率、额定转矩、额定转速、调速范围、峰值功率等方面参数均满足整车设计要求。试验表明车辆最大爬坡度可达30%,两驱/四驱空满载电机效率均在80%以上。目前原理样车在神东大柳塔矿试运行表现良好,单次续航里程可达90 km。实践表明,这种牵引电机的参数设计方法具有一定的推广性和可操作性。
