大范围XY微位移平台的交叉耦合效应的研究
2019-08-06李晓春耿冬妮
李晓春,耿冬妮
(吉林大学 工程训练中心,长春 130025)
0 引言
近年来,精密加工技术受到了世界范围内的广泛关注,例如加工机床、半导体制造、扫描探针显微镜等等[1]。在研究领域与工业应用领域中,精密位移平台起到了关键性的突破作用,包括:生物纳米技术、半导体制造、数据存储系统等[2]。这些位移平台一般依赖于柔性铰链来提供无摩擦力的线性和旋转运动,压电叠堆驱动纳米定位器的出现满足了纳米技术相关应用的要求。
交叉耦合效应是两轴扫描应用中产生两轴误差的主要难题之一[3]。交叉耦合表示响应于X方向驱动的任何沿Y方向的运动。由于交叉耦合效应的存在,施加在x轴或y轴上的信号会使x-y平面上的轨迹产生波纹。并且,在没有端点反馈的情况下,需要额外的校准步骤来确定驱动器坐标和工作台坐标之间的转换矩阵[4]。
本文由Tian等建立了运动学模型,并通过数学计算对误差进行补偿,实现了基于模型的开环控制器,以减小原子力显微镜(AFM)扫描器横轴和垂直轴间的交叉耦合[5-6]。近年来,有一种从昂贵的传统方法转向低成本的原型制造和生产设施的一种趋势,称为微型工厂[7]。虽然这些加工技术发展迅速,但由于成本高且不具有普遍性而受到限制。
由于聚合物具有生物相容性和电绝缘性,可以将聚合物材料用作柔性平台是探索生物,电和磁应用的另一种方法[8]。而且,与金属材料的柔性平台相比,聚合物材料的柔性铰链具有较大的扰度并且受力较低。因此,在绝缘材料、电磁惰性的应用中,聚合物材料是有利于金属柔性铰链设计的。
为了在商业上可行,大多数纳米定位系统是廉价、快速并且适合大规模使用。而且,聚合物的柔性机构材料成本低,易于制造、无摩擦、坚固耐用。然而,在结构加工方面,聚合物材料的许多性能如多轴柔度,交叉耦合,粘弹性/蠕变等还没有进行研究。此外,很少有大范围的 (~1mm)纳米定位柔性平台。本文设计了一种基于聚合物的大范围(大于1mm)的XY柔性平台,并用有限元方法(FEM)和实验研究了增材制造(AM)平台的耦合效应。AM的平台采用定位反馈控制,以防止耦合效应。
1 系统配置
多轴纳米定位系统可以采用串联或并联的运动构型来构建[9-10]。XY串联运动结构由两个正交放置的单轴系统组成。另一方面,XY并联运动学在并联驱动中使用地面安装的驱动器产生XY运动。这种结构以高带宽和高精度而闻名[11]。然而,XY并联运动学在X轴和Y轴之间仍然存在交叉耦合问题。并且,没有关于增材制造(AM)工艺的XY纳米定位系统的交叉耦合效应的文献。
如图1所示,Awtar和Parmar在2013年设计了XY并联运动学结构,用于测试AM平台的交叉耦合效应。由于增材制造是一种快速成型技术,受到许多材料限制和分辨率问题的困扰,因此还不能被作为一种可以用于高性能终端设备的技术。对于精密设备来说传感和控制系统是其关键技术,精密平台尤其如此。
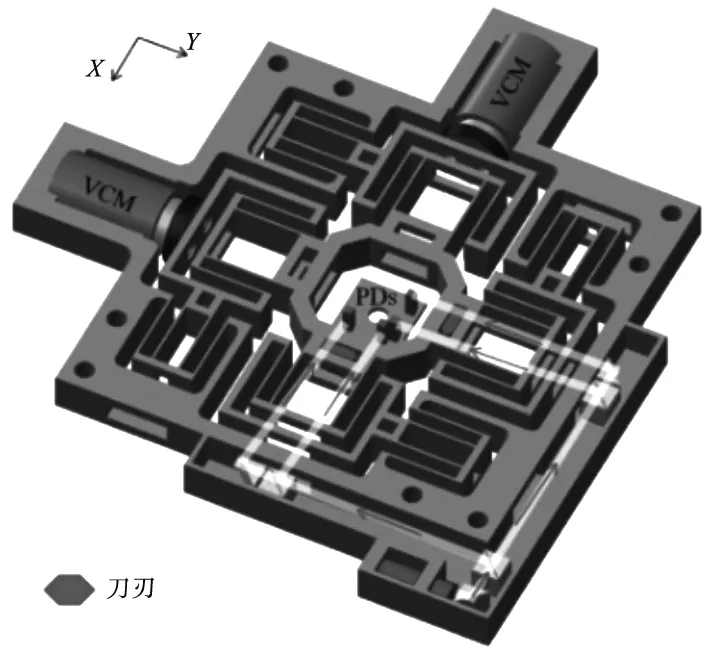
图1 XYAM平台传感系统示意图
如图2所示,对高分子材料的性能特征,进行了应力应变试验和疲劳寿命试验。并且制备了AM样品,获得了AM试样的弹性模量795 MPa。该试验机允许周期性正弦加载测试样本恒定偏转。记录每一个循环的载荷。当试样的负荷减少原负荷的10%时,该零件就会发生故障。并且,曲线拟合是通过对数尺度上的线性函数进行的。
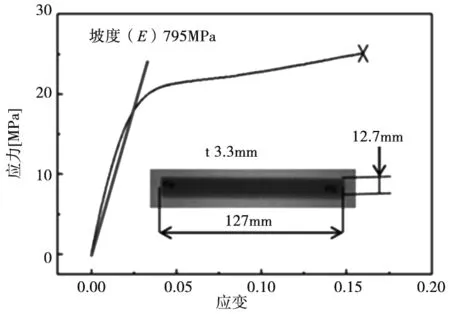
(a) 应力-应变
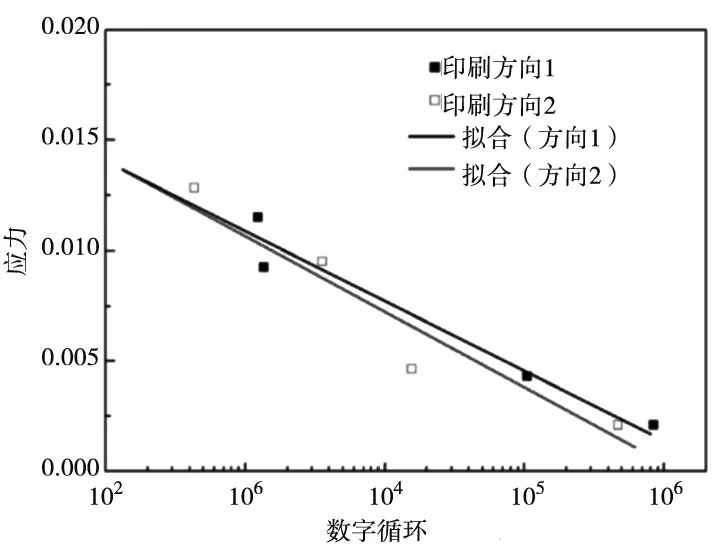
(b) 疲劳实验 图2 应力应变试验和疲劳试验
如图3所示,XY平台是由有限元法设计的,在给定柔性弹簧几何形状条件下,当施加的力为10N时,柔性铰链设计在1 mm以上。AM平台对xx轴和yy轴的柔度为0.125 mm/n,对XY和YX轴的柔度为0.00125mm/n,耦合效应估计为1%。应力与位移呈线性关系,达2mm:1.48MPa/mm。
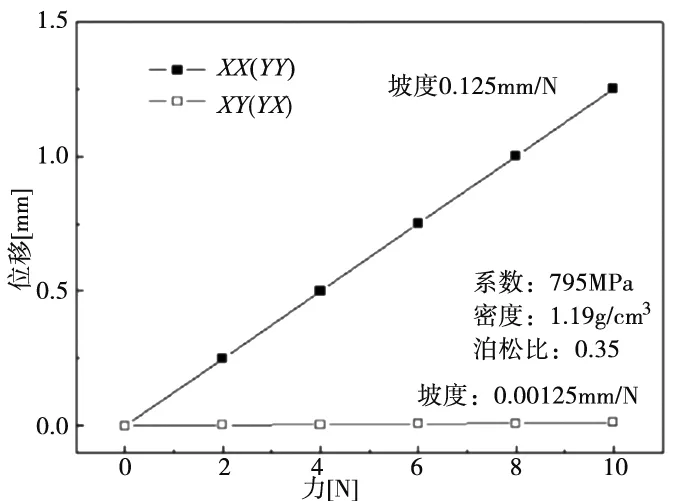
(a) 交叉耦合效应
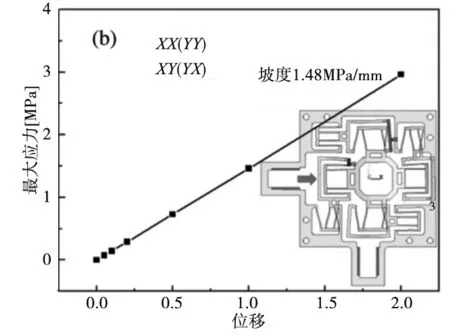
(b) 最大应力曲线
如图4所示,AM平台通过将传感器和驱动器以紧凑的形式嵌入到平台中,采用两台声圈电机作为驱动器,并沿平台各移动轴对齐和柔性平台组装在一起,以减少阿贝误差[12]。
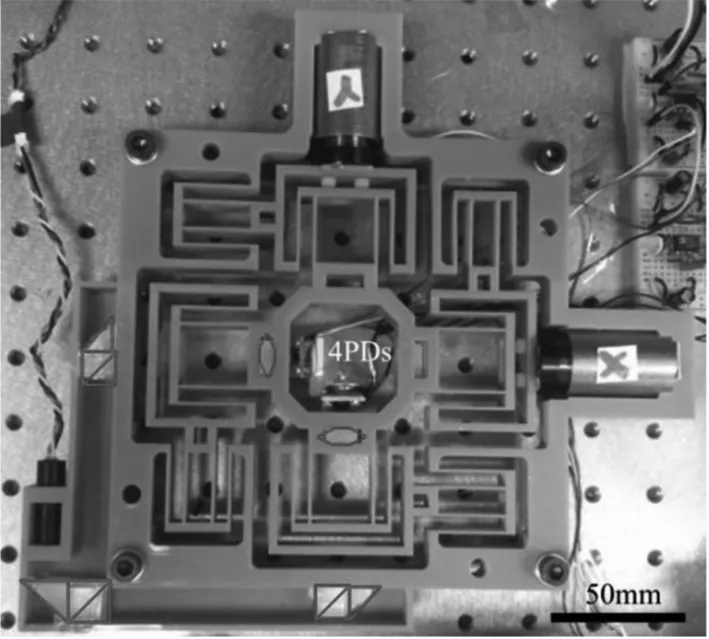
图4 实验装置
本研究中,传感器带宽设置为10 kHz,它沿每个移动轴轴对齐,以避免阿贝误差和最小化余弦误差。它由激光二极管(LD 650 nm)、3个50/50分束器(BS)、3个直角棱镜、两个双面光刀刃和四个硅光电探测器(PD)组成。光学刀刃与PD的距离设定为10 mm。如图5所示,该传感器采用电容型传感器进行校准,两个轴的线性度为:X轴为8.99 V/mm(非线性0.60%)和Y轴为9.02 V/mm(非线性0.73%)。非线性定义为在给定范围内的线性为最小二乘拟合误差。由于理论值(非线性0.02%)和实验结果显示出的高线性度,本实验中使用的电容式传感器限制在±500μm,并且假设传感器可以测量的值高达±1.3 mm。
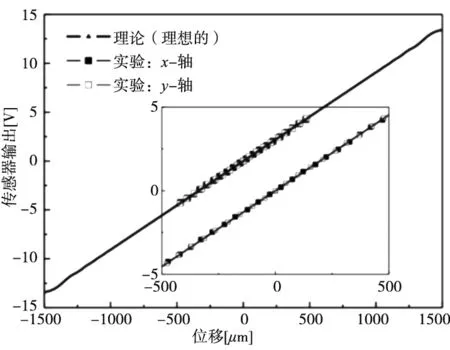
图5 传感器校准结果
如图6所示,AM平台的柔度分别为XX0.126 mm/n和YY0.122 mm/n。实验结果与估计值基本上一致,如图7所示,X轴和Y轴的1.0mm正弦运动,XY和YX轴的AM平台的交叉耦合效应分别为3.4%和8.1%,比估计值1.0%要大得多。

图6 柔度测量结果与有限元结果的比较
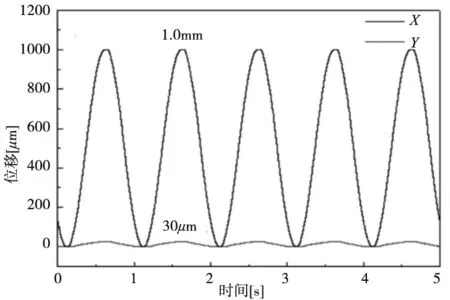
(a) Y耦合运动对X正弦运动
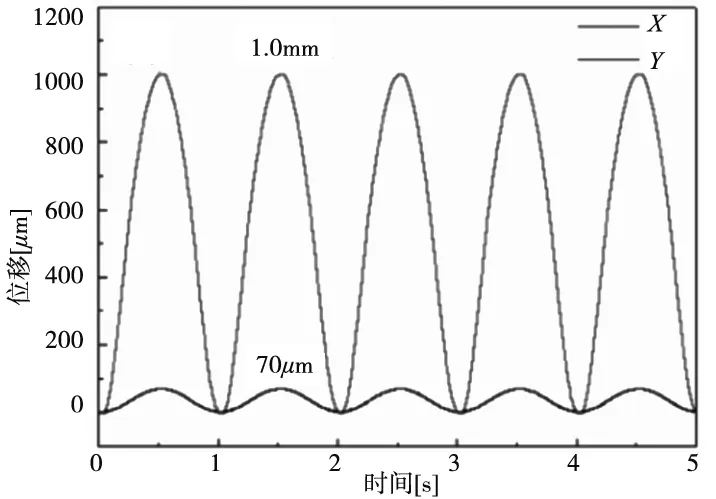
(b) X耦合运动对Y正弦运动 图7 耦合运动对正弦运动结果图
由此,归-化交叉耦合效应可以用矩阵形式表示为:
(1)
2 实验
如图8所示,开环阶跃响应中获得了XYAM平台的固有频率和阻尼比为:X(55.6 Hz,0.14)和Y( 52.6 Hz,0.09)。低阻尼比从根本上限制了控制系统的闭环带宽。抑制尖锐共振行为最常用的方法是在闭环中使用陷波滤波器或基于反向的滤波器。
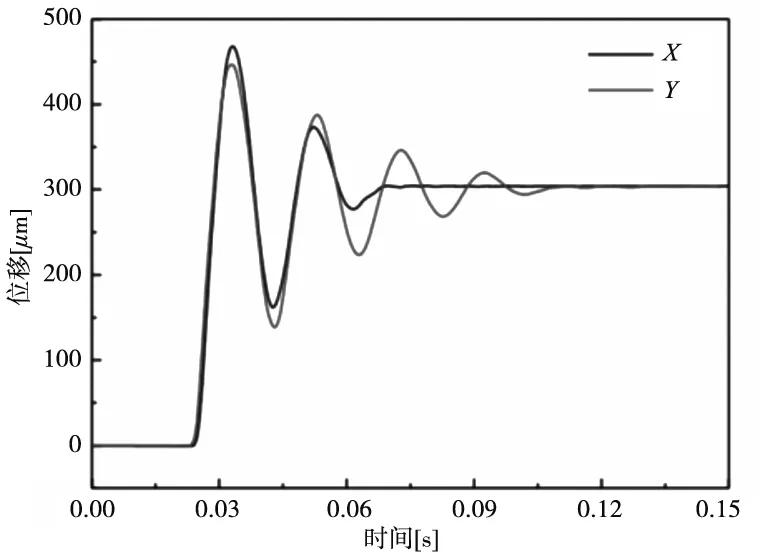
图8 开环阶跃响应结果
本文考虑了比例-积分-微分(PID)增益控制、电流反馈和前馈控制,由于电流并联运动形式难以建立精确的谐振频率模型,不考虑特殊的阻尼控制技术。如图9所示为闭环的控制框图。由于大交叉耦合效应为8.1%(基于金属的柔性平台交叉耦合效应典型值为~2%),AM平台必须有PID反馈控制定位。为了消除放大器产生的交叉失真,设计了电流反馈回路,并且通过PID实现了定位控制。采用n型(IRF 530)和p型(IRF 5305)MOSFET设计了用于VCM的B类放大器,并利用运算放大器设计了电流反馈环。
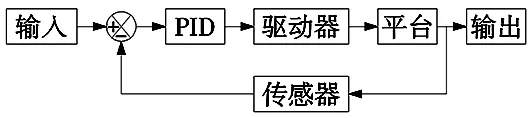
图9 控制回路框图
如图10所示,闭环控制的定位精度沿x轴和y轴获得:X为21.5nm和Y为19.3nm。将两个正弦参考信号分别应用于两个VCM中,在开环控制中,在R0.1mm和R1.0mm条件下,径向轨迹误差最大分别为14.2μm (图11a)和115.4μm (图11b),而在闭环控制情况下,均方根误差分别降至0.77μm (图12a)和3.62μm (图12b)。
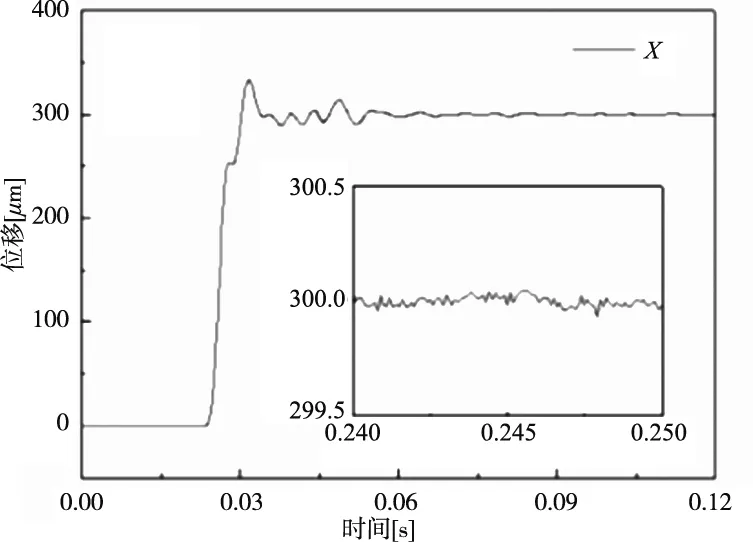
(a) X轴
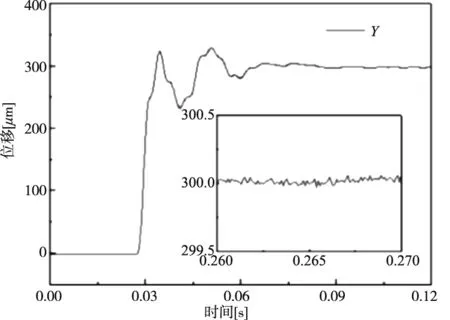
(b) Y轴 图10 闭环阶跃响应结果
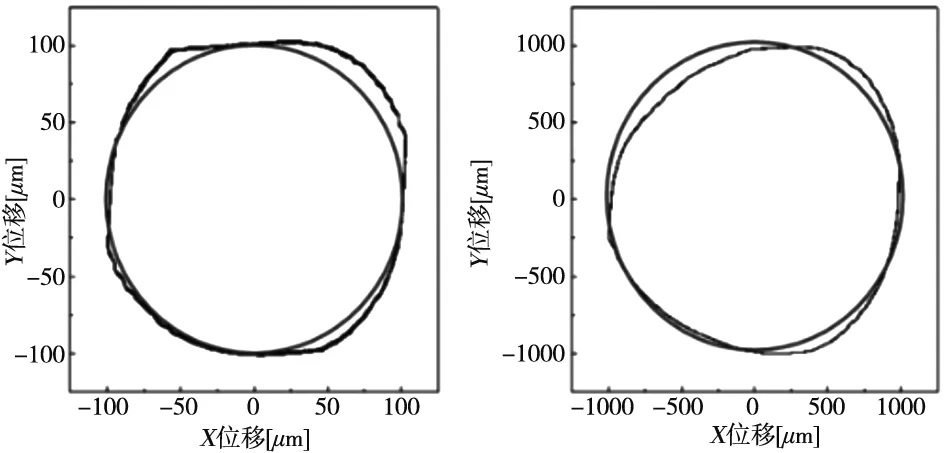
(a) R0.1mm (b) R 1.0mm 图11 开环轨迹误差
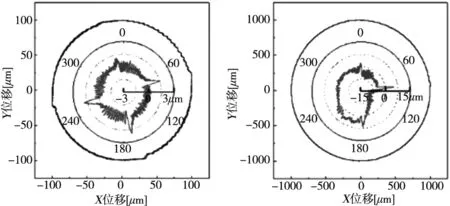
(a) R0.1mm (b) R1.0mm 图12 闭环轨迹误差
如图13所示,在极坐标下绘制了径向轨迹误差图,在相同R0.5mm条件下,AM平台在1Hz和10.92μm的径向轨迹误差分别为2.50μm和10.92μm。结果表明,径向轨迹误差沿快速圆运动方向增大。
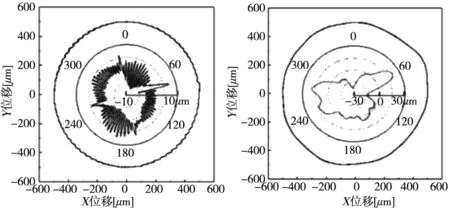
(a) 1Hz (b) 10Hz 图13 R0.5mm闭环圆周运动和轨迹误差
如图14所示,在不同的XY频率条件下,分别画出X(R0.5mm,2Hz)和Y(R0.5mm,1Hz)的曲线。同时将两个不同频率的正弦参考信号分别应用于两个VCMs中。与开环控制情况(最大径向轨迹误差77.14μm)相比,闭环控制的径向轨迹误差为2.74μm。通常这些径向轨迹误差有4个原因:①实际轨迹沿各轴方向的正弦和余弦输入的幅值和相位误差;②给定频率的高阶谐波;③电子噪声;④PID增益不匹配和VCM性能造成的控制限制。并且,由频率响应曲线得到了XY柔性机构的动态特性:X轴和Y轴的共振频率约为80 Hz,如图15所示。
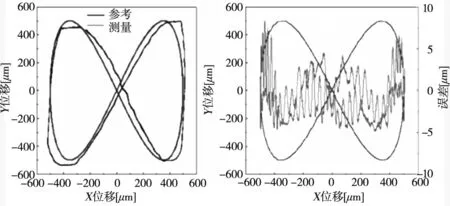
(a) 开环条件 (b) 闭环条件 图14 R0.5mm,X2Hz和Y1Hz曲线运动
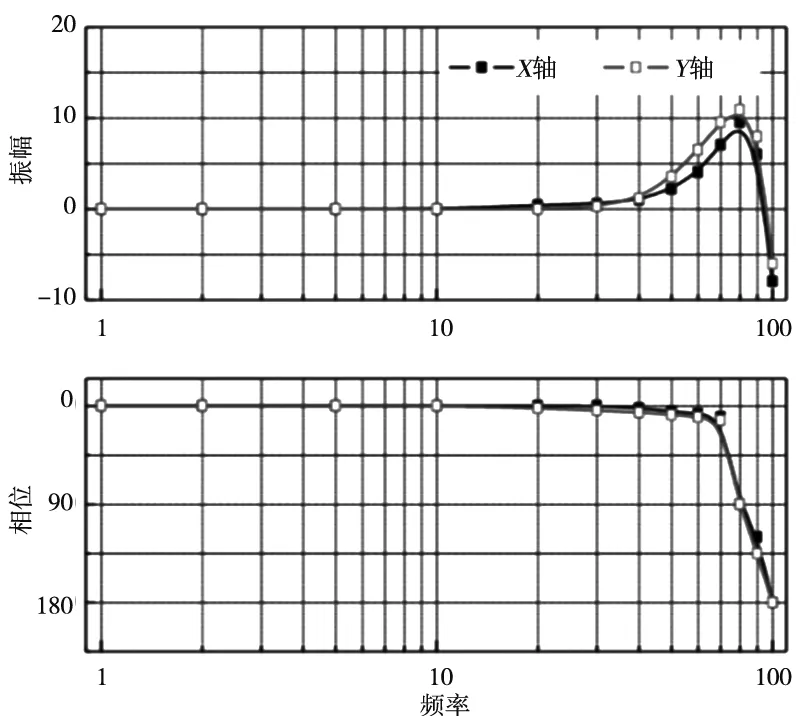
图15 柔性机构的闭环频率响应曲线
3 结论
本文设计了一种新型XY增材制造(AM)纳米定位系统,并对AM平台的交叉耦合效应和定位控制效果进行了研究。通过立体光刻工艺加工AM平台,并且将光学刀刃传感器和声圈电机(VCM)用作传感器和驱动器。实验结果表明AM平台不能在开环模式下使用。并且,通过定位反馈控制表明,AM平台具有范围大、精度高等特性。
