达芬奇机器人在原发性腹膜后肿瘤手术中的应用
2019-08-05查立超邱法波李国瑞何向阳
查立超 邱法波 韩 冰 李国瑞 何向阳
(青岛大学附属医院肝胆外科,青岛 266003)
原发性腹膜后肿瘤是一类起源于腹膜后间隙的不同病理类型肿瘤的统称,这类肿瘤临床上比较少见,由于其位置深在、暴露困难,治疗主要以开腹手术为主[1,2]。随着微创技术的发展,腹腔镜、机器人等在普通外科领域的应用越来越广泛,但对于腹膜后肿瘤,目前少有应用达芬奇机器人切除的报道[3]。2015年3月~2018年7月我院行达芬奇机器人腹膜后肿瘤切除术31 例,无中转开腹,无肠道并发症发生,现报道如下。
1 临床资料与方法
1.1 一般资料
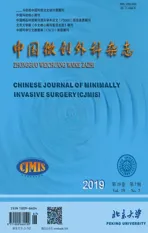
本组31例,男16 例,女15 例。年龄12~71岁,(46±14)岁。腹部不适11 例,其余20例均为无症状查体发现有腹膜后肿瘤。腹部增强CT或MR检查明确腹膜后肿瘤的大小、位置及血供情况:肿瘤直径2.5~11 cm,(5.3±2.1)cm;左上腹11例,右上腹4例,左下腹8例,右下腹4例,盆腹膜外4例;16例肿瘤紧邻腹主动脉、双侧髂总动脉、下腔静脉、内脏血管等腹膜后大血管(图1),15例肿瘤不靠近上述大血管。术前实验室检查均无明显异常,心肺功能等常规影像学检查提示无手术禁忌。原发性高血压5例,糖尿病3例,胆囊结石2例,哮喘1例。5例有腹部手术史。
病例选择标准:①术前检查提示腹膜后肿瘤包膜完整、边界清晰;②肿瘤直径<10 cm;③肿瘤非骑跨在腹膜后大血管两侧者;④无远处转移。
1.2 方法
按开腹腹膜后肿瘤手术进行术前准备。气管插管全身麻醉,采用经腹腔途径。手术体位及入路:左上腹腹膜后肿瘤参考机器人远端胰腺切除术,右上腹腹膜后肿瘤参考机器人胰十二指肠切除术,下腹及盆腔腹膜后肿瘤参考机器人结直肠手术,位于肾门及肾周的腹膜后肿瘤参考机器人肾切除术[4~7]。采用达芬奇Si手术系统,脐周建立气腹,压力14 mm Hg。将镜头孔trocar 穿刺,置入机器人镜头,探查腹腔内无广泛转移,符合手术指征,结合术前CT 影像定位,参照上述机器人远端胰腺切除、胰十二指肠切除、结直肠切除、肾切除的布孔方法置入操作孔。放置机械臂塔,安装各操作臂。根据不同的肿瘤位置可采取不同的寻找及暴露方式:左侧腹膜后肿瘤可将胃结肠韧带或左侧侧腹膜打开,肿瘤位于左上腹者可游离脾结肠韧带,将胃及胰尾向上牵引;肿瘤位于左侧中下腹腹者可将左半结肠及其系膜翻向内侧;肿瘤位于胰腺后上方者可打开小网膜囊,将胃向下牵引。右侧腹膜后肿瘤需切开右侧侧腹膜,肿瘤位于右上腹者可分离肝结肠韧带,游离十二指肠外侧腹膜;肿瘤位于右侧中下腹者可将右半结肠及其系膜翻向对侧以利于暴露。对于肾脏以下的腹膜后肿瘤,应避免伤及输尿管。位于中线附近较小的腹膜后肿瘤可直接切开肿瘤表面的肠系膜,即可充分显露肿瘤,此时应注意避免损伤肠系膜血管。位于盆腹膜外的腹膜后肿瘤,可将结肠及小肠向上牵引,从而显露肿瘤。1例节细胞神经瘤位于下腔静脉右侧,见图2。找到肿瘤部位后,用超声刀沿肿瘤周围的间隙仔细分离,对于肿瘤部位的血管,较粗大的血管分离后用血管夹闭合后切断,较细的血管可用超声刀直接凝断。术中应尽量将肿瘤的包膜完整切除。
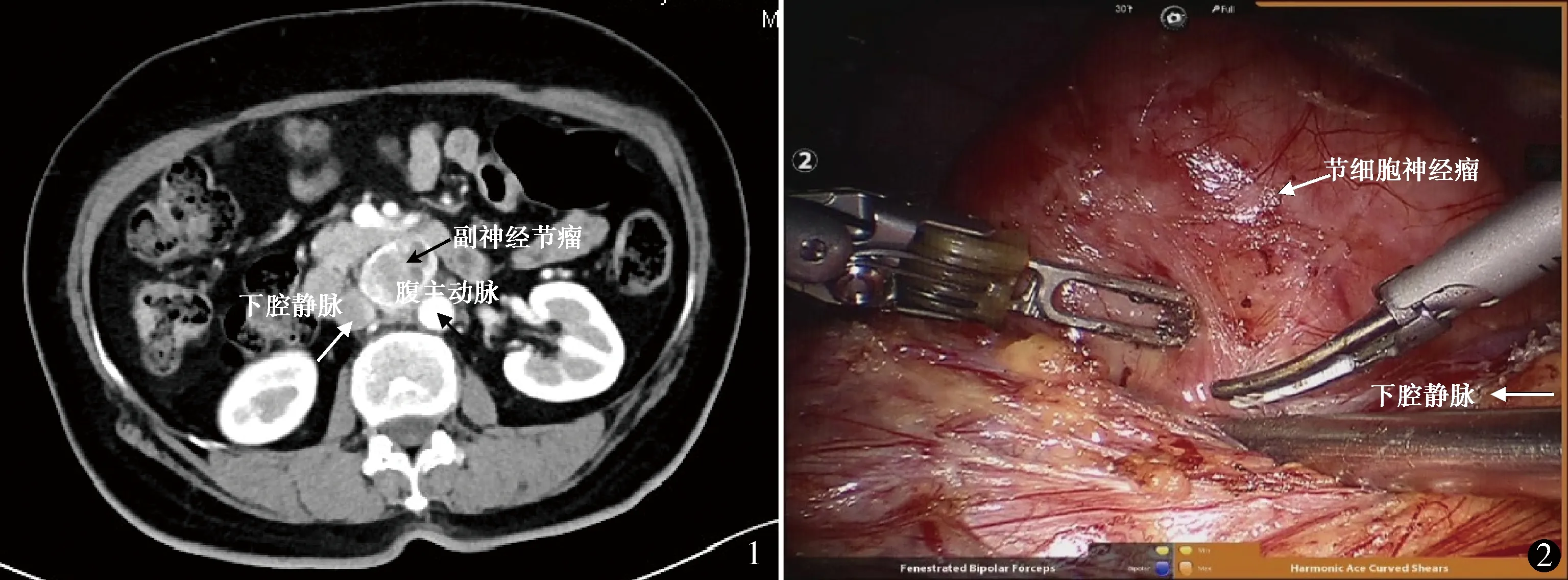
图1 术前CT示肿瘤位于腹主动脉与下腔静脉间 图2 节细胞神经瘤位于下腔静脉右侧
2 结果
31 例均在达芬奇机器人辅助下顺利完成手术, 无中转开腹,无输血病例,肿瘤均有完整包膜。手术时间(从切皮至缝皮完毕)25~280 min,中位数145 min;术中出血量2~300 ml, 中位数10 ml。术后住院时间1~8 d,(3±1)d。术后未发生肠道并发症。术后病理: 28例良性肿瘤分别为腹膜后囊肿7例,副神经节瘤6例,神经鞘瘤5例,Castleman病4例,神经纤维瘤2例,节细胞神经瘤1例,淋巴管瘤1例,副脾1例,炎性肿物1例;3 例恶性肿瘤分别为高分化平滑肌肉瘤2例,弥漫性大B细胞淋巴瘤1例。
采用门诊和电话相结合的方式进行随访,每3个月随访1次,随访截止时间2018年12月20日,31例随访5~45个月,中位随访时间17个月,包括2例高分化平滑肌肉瘤和1例弥漫性大B细胞淋巴瘤在内,所有患者均获得无瘤生存,除1例Castleman病和1例弥漫性大B细胞淋巴瘤术后定期化疗外,其余患者术后均未行放化疗。
3 讨论
腹腔镜手术治疗原发性腹膜后肿瘤国内外多有开展,安全性和可行性已获得验证[8,9],但机器人手术切除腹膜后肿瘤目前仍较少见[5]。达芬奇机器人手术系统克服腹腔镜下手颤动、操作器械自由度小等缺陷[10],对位于腹腔内深部解剖结构的肿瘤能够更加清晰地进行解剖、分离,甚至可以将一些贴近腹膜后大血管的腹膜后肿瘤安全而完整地切除,比传统腹腔镜的操作更加精细、安全、稳定。本组31例均顺利完成手术,总结体会如下。
达芬奇机器人手术系统优势明显。达芬奇腹腔镜的局部视野放大功能,使视野更清晰、解剖更精细,可明显减少对周围组织的损伤[11]。本组无术后肠道并发症发生是对以上观点的支持。腹膜后肿瘤在病理类型、大小、位置等方面多种多样,不同肿瘤的术中情况差别很大。本组手术时间、术中出血量差别较大,原因可能与腹膜后肿瘤的大小、位置及病理类型复杂多变,以及手术操作的熟练程度有关。腹膜后神经源性肿瘤多为良性肿瘤,如神经鞘瘤、神经纤维瘤、节细胞神经瘤、副神经节瘤等,此类肿瘤多与腹膜后神经关系密切,术中一旦损伤神经主干,极易引起相应的功能障碍,达芬奇机器人提供的精细操作可达到减少医源性神经损伤的目的。术中刺激副神经节瘤可使其分泌儿茶酚胺,使术中血压发生较大波动,增加手术风险,达芬奇机器人精细的操作可减少对肿瘤的挤压,使术中血压波动更小[12]。达芬奇机器人对腹膜后和腹腔多发肿瘤的切除优势明显,尤其适用于伴有腹部合并症的腹膜后肿瘤。本组2例腹膜后及腹腔多发肿瘤,采用达芬奇机器人将多发肿瘤完整切除,缩小手术切口,术后恢复明显加快。
能否完整切除肿瘤是腹膜后肿瘤切除术中的重要因素,因此,手术适应证的把握至关重要[13]。腹部CT、MRI尤其是增强检查是腹膜后肿瘤重要的诊断方法,有助于术前明确腹膜后肿瘤的大小、位置、毗邻及血供情况。肿瘤大小并非难点,腹腔镜切除腹膜后肿瘤的手术指征为肿瘤直径不超过6 cm[8],结合既往手术经验,我们认为达芬奇机器人的手术适应证为肿瘤直径一般不超过10 cm,既体现机器人手术的优势,也在一定程度上扩大了腹膜后肿瘤的微创指征。本组切除最大的腹膜后囊肿达11 cm,对于这类体积较大的囊性肿瘤,为增加操作空间,术中可穿刺抽液,以缩小肿瘤体积。肿瘤过大会缩小操作空间,增大手术难度,且取标本时需扩大切口,使微创失去意义。原发性腹膜后肿瘤多有包膜,这为肿瘤的完整切除提供了可能[14]。本组31例肿瘤均有包膜,应用达芬奇机器人可按照无瘤原则沿肿瘤包膜将肿瘤完整切除。腹膜后恶性肿瘤的微创手术目前存在争议,本组3例恶性肿瘤行达芬奇机器人手术,肿瘤均较游离,并未增加手术难度,随访未复发。因此,恶性腹膜后肿瘤并非达芬奇机器人手术的绝对禁忌,多数良性肿瘤及部分影像学显示边界清晰、对周围无明显侵犯的恶性肿瘤可考虑采用达芬奇机器人切除。肿瘤位置才是手术的难点,部分腹膜后肿瘤不仅位置深、暴露困难,且靠近大血管,处理更加困难[15]。根据影像学检查提示的肿瘤位置,术前设定合适的体位十分关键。通过调整不同的手术体位,将结肠翻向健侧,可顺利解决腹膜后肿瘤的暴露问题,如位于肾门及肾周区域的腹膜后肿瘤可参考机器人肾切除术取健侧卧折刀位,以利于显露肿瘤,使操作更方便。除非肿瘤骑跨在腹膜后大血管两侧,多数紧邻但不侵犯腹膜后大血管的腹膜后肿瘤可以在达芬奇机器人下完整切除。
达芬奇机器人治疗原发性腹膜后肿瘤安全有效,具有视野清晰、操作精细、微创、恢复快等优点。但由于腹膜后肿瘤临床少见,目前的数据尚不足以证明达芬奇机器人的远期疗效,还需结合大样本随机对照研究。