四履带双摆臂机器人爬坡能力及质心轨迹的研究
2019-08-02
(安徽理工大学机械工程学院 安徽 淮南 232001)
引言
随着工业化的迅速发展,履带式机器人用途越来越大,四履带机器人可分为固定式和摆臂式两种,本文主要以摆臂式为例[1],具有爬坡能力强,易操作的特点,在环境恶劣的煤矿行业得到广泛的应用。
一、机器人爬坡过程
由于履带机器人在爬坡的过程中,一般情况下不会发生翻转的,但是坡度过陡时,这时的履带机器人将无法爬上坡,这是因为随着坡度和高度的改变,机器人的质心会发生改变,影响着机器人的正常攀爬工作[2]。
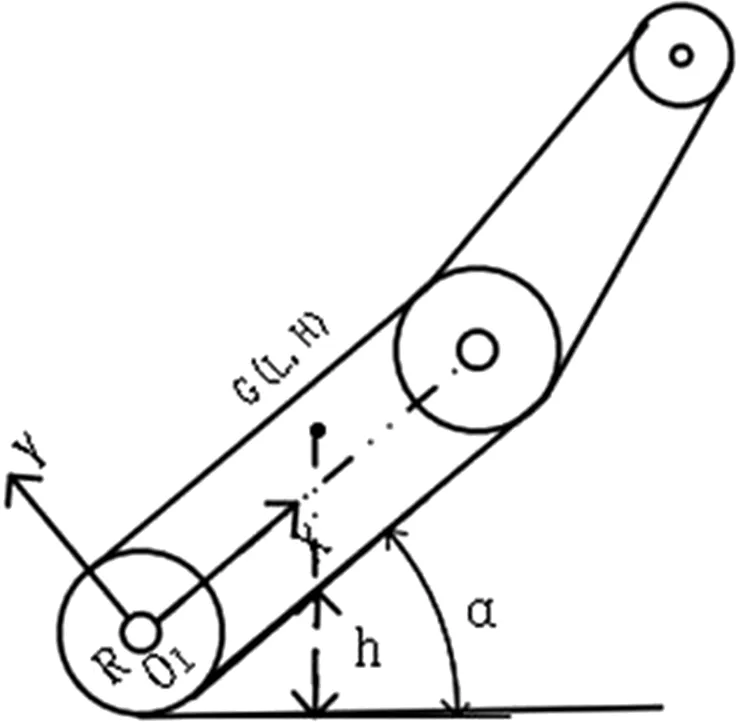
图1 履带机器人爬坡坡度分析图
履带机器人在上坡时,机器人的质心随着α的改变而改变,如图1所示。设机器人此时的仰角为α,机器人仰角时质心与水平线之间的垂直距离为h,建立如下函数:

(1)
式中,若R,H,L确定时,此时机器人的质心处于临界状态,这时机器人恰好能爬上坡度最大时的坡顶;高度h随着机器人仰角α增大而增大。
二、机器人仰角与坡度的关系
机器人在上坡缓缓移动时,主要考虑机器人爬坡的过程中,不发生倾覆现象。由于机器人的履带要始终与斜坡面接触,则α∈(0,π/2);若以机器人的质心坐标为参考量时,分别对式(1)的H,L求偏导得:

(2)
由此,可得h(H,L,α) 关于h的减函数,关于L是增函数,此时,机器人的质心相对于之前的质心向前偏移,有利于机器人爬坡。
三、机器人爬坡的质心轨迹分析
由于履带机器人在上坡时,由于仰角的改变,影响了质心的变化。此时的两个摆臂是同步摆动的,以适应机器人爬坡的过程的需要,如图(2)所示。
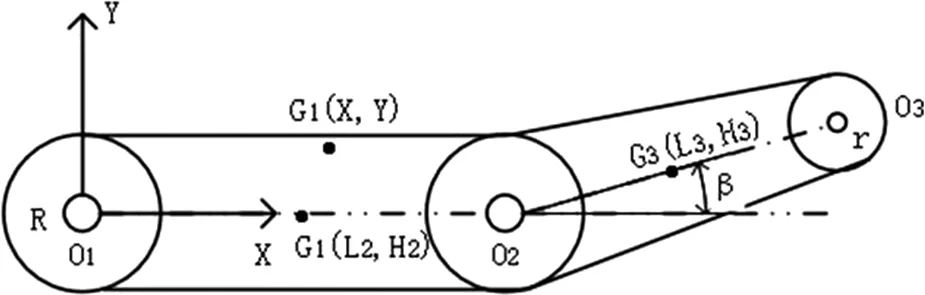
图2 履带机器人爬坡质心分析图
设机器人主体质量为m1,两摆臂质量为m2,机器人整体、机器人整体、两摆臂的质心分别为G1、G2、G3其他参数如图2所示。
由质心矩守恒定律得:

(3)
由式子(3)可得:
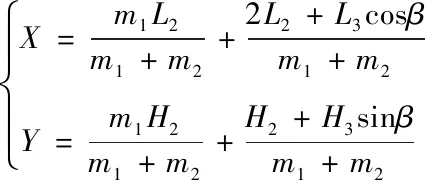
(4)


图3 履带机器人爬坡质心轨迹变化图
四、结论
本文中,履带机器人质心位置变化轨迹曲线呈圆的轨迹,主要通过摆臂同时摆动双臂来改变质心的位置,满足工作过程爬坡需要;履带机器人的仰角与斜坡的坡度有关,主要因为履带机器人的履带要始终与斜坡面接触,以保证在工作的过程中不会发生倾覆现象,对机器人爬坡安全问题有一定的参考价值。
