基于不同电机拓扑的船用轴带发电系统比较
2019-08-01常国梅徐清华邵诗逸武治江乌云翔
常国梅,徐清华,邵诗逸,武治江,乌云翔,郭 伟
(无锡赛思亿电气科技有限公司,无锡 214028)
0 引 言
在传统船舶推进系统中,除了负责船舶推进的主机之外,通常使用另一台定速运行的柴油辅机连接发电机为船舶电站提供电能。
近年来,作为对辅机发电机系统的补充和替代,出现了一种轴带发电的概念[1]。具体地说,是通过齿轮箱将一台发电机连接在主机轴上,主机轴开始工作后便可以同时带动发电机转动从而进行发电。与传统方案相比,轴带发电减少了船舶辅机开机启动次数,降低了使用维护成本,并且提高了主机效率,有效降低了油耗[2-3]。目前,该方案很适合螺旋桨转速恒定的可调桨系统,并且已经在不少实船中得到了应用,如中国第一艘专为深渊海沟科考设计的万米级载人深渊科考母船“张謇号”就采用了轴带发电机,并取得了显著的节能效果[4]。轴带发电方案本质上属于恒定的转速下输出恒定的频率,因此称为“恒速恒频”方案[5-6]。如果要在主机转速时刻变化的定矩桨系统中使用,需要对主机的运行转速提出很大的限制,所以没有被广泛接受,这在很大程度上限制了轴带发电系统的应用范围。
此外,考虑到定矩桨系统中发电机的输出频率也会发生变化,因此需要在发电机和电站之间连接额外的变频器[7],使得无论发电机的频率如何变化,变频器都输出恒定的电压,这种拓扑结构也称为“变速恒频”方案。变频器采用的是四象限的变频器,即有源交-直-交结构,两个交流端子分别连接发电机(也称“机侧”)和电站(也称“网侧”),分别实施对于发电机和电站的控制, 即使变频器整流侧的输入频率和电压发生变化,变频器输出端的频率和电压都是恒定的[3]。
目前,无论在学术界还是工业界,主要考虑将三种类型的电机用于变速恒频系统中,这三种电机分别是无刷同步电机、异步电机和无刷双馈电机。它们的发电原理各不相同,导致了整个电气系统和控制方案呈现出了比较大的区别。
本文分别就基于这三种电机的方案进行原理分析和性能比较,并且着重在控制方案和控制算法层面进行详细的技术讨论,旨在比较这些方案的主要优缺点,最后通过实验平台对上述三个方案的电机系统进行控制算法的验证。
1 变速恒频轴带发电系统简述
一个典型的变速恒频轴带发电系统如图1所示,其核心是发电机和变频器的组合。发电机负责将螺旋桨多余的机械能转化成动能,变频器负责将发电机频率和电压变化的电能转化成频率和电压固定的输出,通过滤波器滤波后提供给船用负载供电。如果采用不同的发电机,系统的拓扑会有一些变化,下面将对这些内容进行详细分析。

图1 轴带发电系统框图
2 三种不同发电机拓扑的分析和比较
2.1 无刷同步发电机
2.1.1 基本介绍
同步发电机的系统框图如图2所示。无刷同步发电机内置励磁机,可以通过外部的电压调节电路板(AVR)对输出电压进行调节。该方案的最大优势在于无刷同步发电机已经被船舶行业广泛地接受和认同,其技术兼容性好,使得大部分柴油发电机几乎不需要做改动,就可以应用成为轴带发电机。
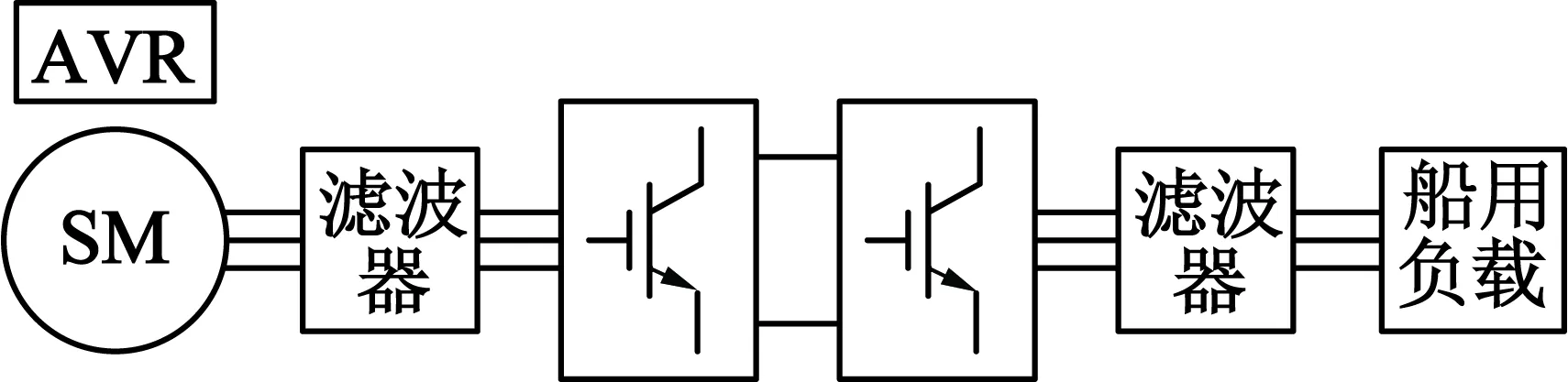
图2 同步发电机的系统框图
由于无刷同步发电机通常不会采用绝缘加强的绕组,因此在一般情况下变频器需要连接一个正弦波滤波器[8]。除此之外,采用无刷同步发电机最大的挑战和限制在于:
(a) 当主机的转速运行范围较宽时,需要定制AVR,保证在较大的范围内实现恒定的输出电压。即便如此,当发电机在低转速时仍然输出额定电压,需要在电机设计时充分考虑磁场饱和,以及为了减缓磁饱和所导致的发电机体积和质量可能增加的问题。
(b) 如果主机发生故障,无刷同步发电机在静止条件下无法通过励磁机实现转子的励磁,因此不具备自起动功能,所以电动运行的功能无法实现。
2.1.2 控制系统
同步发电机的控制类似电网的并网控制,与传统的网侧变频器的控制算法相似,将同步轴带发电机看成频率变化的电网,其本质是通过控制输入电抗器两端的电压差实现功率的控制。忽略定子电阻的影响,同步电机的电压方程如下:
(1)
(2)
式中:vsd,vsq是同步发电机的端电压;vd,vq是变频器的输出电压;id,iq是变频器的输出电流;ωs是同步发电机的角频率。
矢量控制的关键在于同步角度θs的选取,本文选择θs使得电网矢量定向在d轴上,即vsq=0。该矢量角度θs通过对于三相电网电压锁相获得[5]。
同步发电机的有功功率P的公式如下:
(3)
因此,可以通过对d轴电流id的控制,实现对于直流母线电压的管理。一个基本的控制框图如图3所示。在控制上,需要注意的是矢量控制算法需要足够快,以至于在控制时间常数上不会和AVR形成互相扰动,导致控制系统发散。
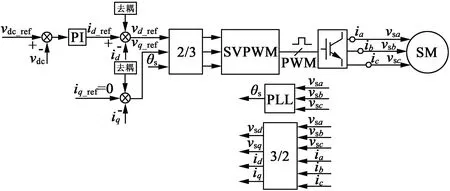
图3 同步发电机矢量控制框图
2.2 异步发电机
2.2.1 基本介绍
异步发电机的系统框图如图4所示。异步电机的驱动系统已经广泛应用于工业领域,技术相对成熟。异步电机的轴带发电本质上可以认为是异步电机驱动系统的逆过程,即异步电动机工作在发电机状态下,因此,异步轴带发电机技术成熟度很高。
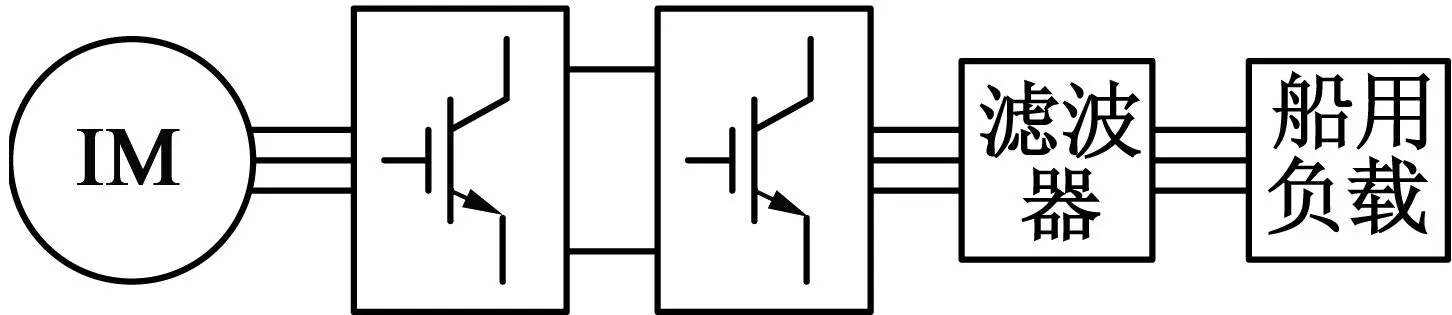
图4异步发电机的系统框图
相对于同步发电机,异步发电机的转子采用鼠笼结构,可以承受更高的温度和更恶劣的环境,可靠性更高。
此外,由于异步发电机的励磁由变频器提供,而不需要类似AVR这样的励磁设备,因此异步发电机的转速适应范围更宽,而且可以在零转速下起动,很适合在电动运行等应急工况下使用。而采用异步发电机最大的限制是励磁需要由变频器提供,即变频器必须先完成预充电,所以在全船失电等特殊情况导致变频器失电时,异步发电机需要设置专门的变频器预充回路,以实现异步电机的励磁。
2.2.2 控制系统
异步电机的基本公式[9]:
(4)
(5)
ψs=Lsis+Lmir
(6)
ψr=Lrir+Lmis
(7)
式中:ωsl是异步发电机的转差频率,定义:
ωsl=ωs-pωθ
(8)
通过上述方程组可以推导出异步发电机的控制器。一般来说,采用基于转子磁链定向的矢量控制算法[10],可以得到异步发电机的转矩公式:
(9)
控制上需要保证d轴的定子电流isd恒定,以维持整个异步发电机的磁链,转矩可以通过异步发电机的q轴定子电流isq来控制。这样就形成了有功和无功的解耦控制。
在轴带发电系统中,转矩或者有功功率可以用来管理直流母线电压,整体的控制框图如图5所示。
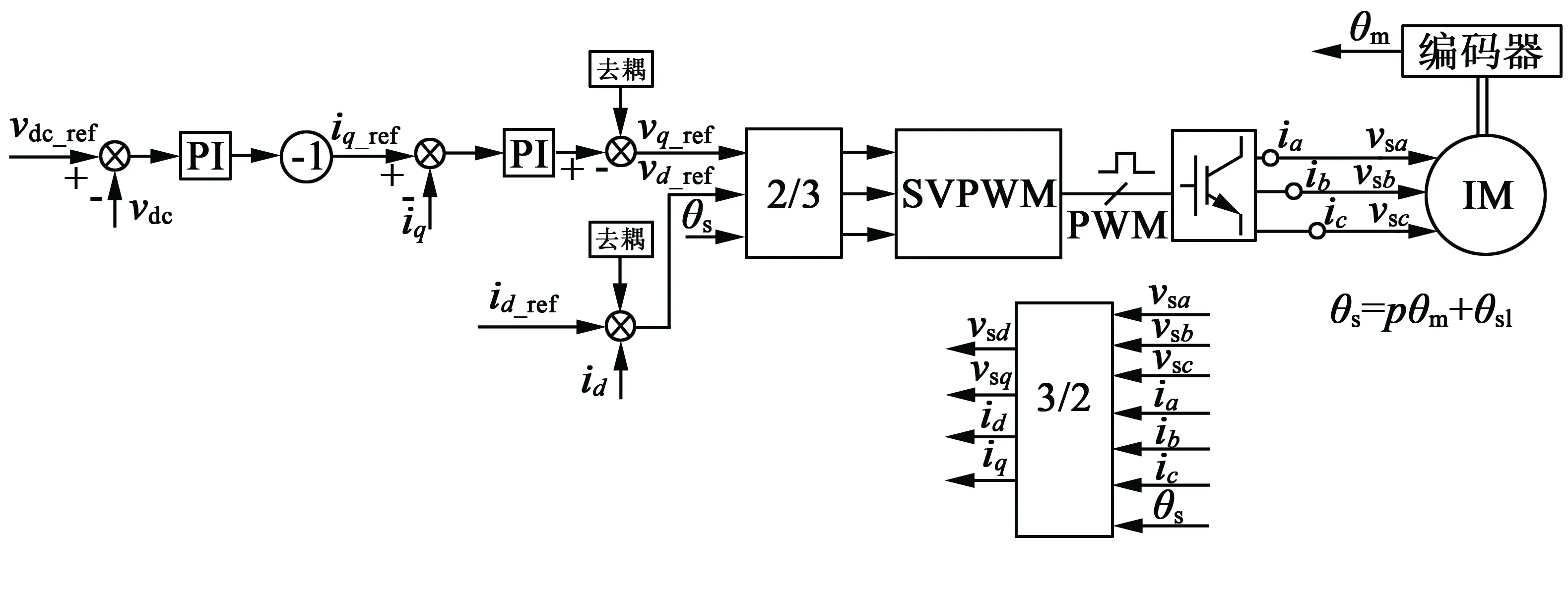
图5 异步发电机矢量控制框图
2.3 无刷双馈发电机
2.3.1 基本介绍
无刷双馈发电机的系统框图如图6所示。无刷双馈发电机是一种比较新颖的电机,具有两个独立的定子绕组,这两个绕组分别是与电网相连接的功率绕组(PW)和与变频器相连接的控制绕组(CW)[1]。虽然这两个三相绕组都绕在定子铁心上,但它们的极对数组合均采用特殊的设计,磁场没有直接耦合[11],而是通过一个特殊的转子绕组实现磁场的间接耦合,以实现功率的交互。

图6 无刷双馈发电机的系统图
无刷双馈电机作为轴带发电系统的最大优势在于其控制绕组仅吸收滑差功率,所以只需要使用部分功率变频器即可。变频器的功率与电机调速范围密切相关[12]。轴带发电系统仅要求发电机在一个固定的范围之内运行,所以基于无刷双馈发电机的轴带发电系统可以大大降低变频器的功率以及相应的成本。
然而,无刷双馈发电机在技术上还有如下的一系列问题需要考虑和克服。
(1) 基于无刷双馈发电机的矢量控制虽然已经出现,但是由于受制于功率绕组和控制绕组之间的解耦能力较弱,因此总体动态特性较差;
(2) 无刷双馈电机的两组定子绕组的极对数设计,由于需要考虑两个定子磁场的解耦,必须遵循一定的规范[11],因此设计灵活性较差。考虑到无刷双馈电机的转速是由两个绕组的极对数之和决定的[12],所以无刷双馈电机额定转速的选择受到比较多的设计上的限制;
(3) 无刷双馈电机本质上采用感应的原理,因此在零转速时也无法励磁,在全船失电时需要考虑额外的励磁回路,也无法做电动机运行。
2.3.2 控制系统
无刷双馈发电机的主要方程组需要同时考虑两个定子绕组和一个转子绕组,相对于同步发电机和异步发电机明显要复杂,方程组的数量明显增加,公式为:
(10)
ψ1=L1i1+L1rir
(11)

(12)
ψ2=L2i2+L2rir
(13)
(14)
ψr=Lrir+L1ri1+L2ri2
(15)
无刷双馈发电机的转矩公式如下:
(16)
文献[13]详细分析了无刷双馈发电机矢量控制的原理,本质上是通过对控制绕组的电流控制,间接控制功率绕组的电流,最终实现对于转矩的控制,控制框图如图7所示。需要注意的是控制绕组和功率绕组的d轴和q轴无法充分实现解耦控制,需要通过PI控制器进行补偿,这样造成了无刷双馈发电机的控制动态性能相对较差。
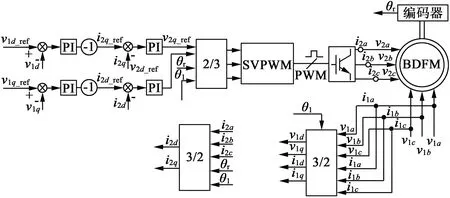
图7 无刷双馈发电机矢量控制框图
3 实验验证
3.1 实验平台搭建
为了验证上述基于三种不同电机的轴带发电系统的控制方案,并且比较它们的控制指标的区别,建立了一个电机对拖原理实验台,用于验证控制性能,实验平台如图8所示。
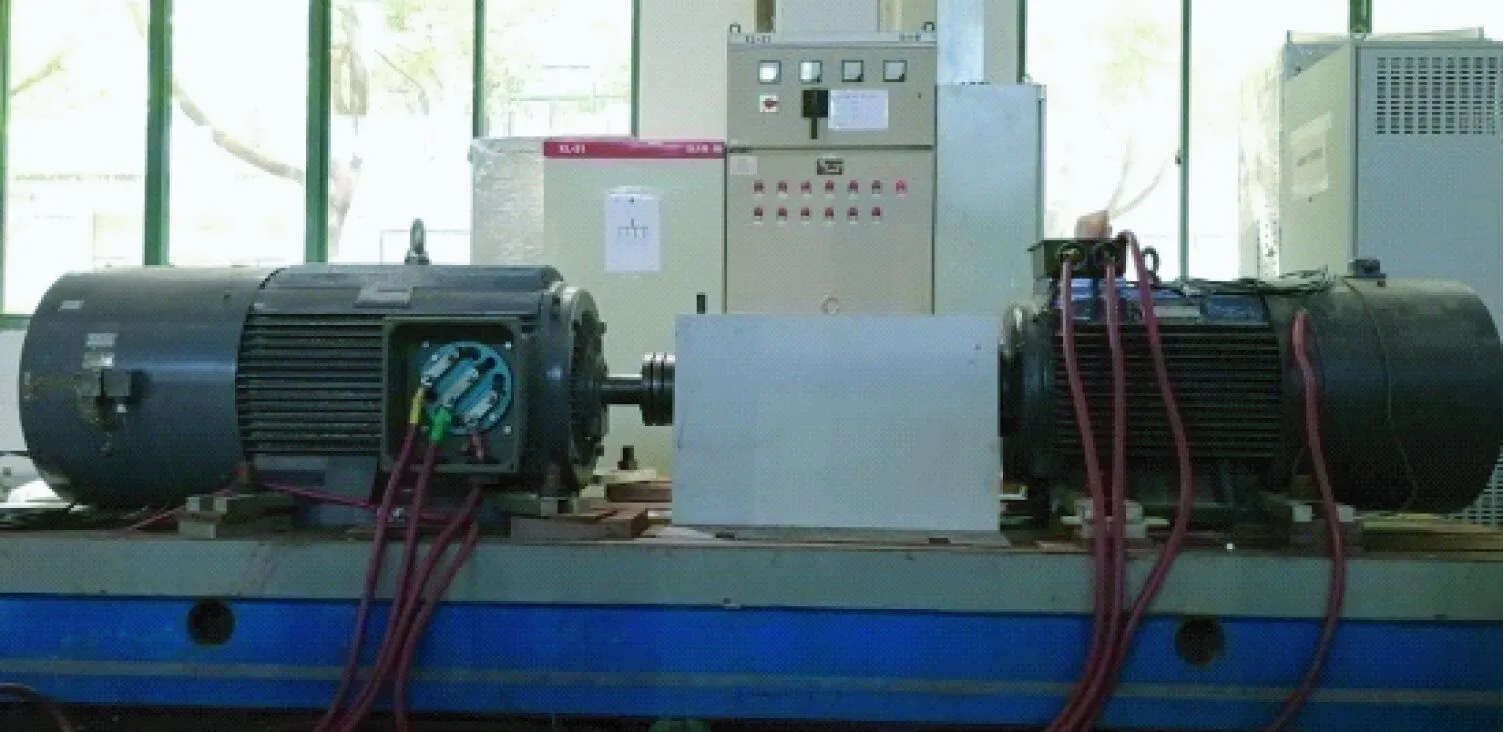
图8 电机对拖实验台
该平台中的原动机采用一个250 kW的异步电机进行驱动,分别进行三种被试电机的实验,这三种发电机的参数如表1所示。
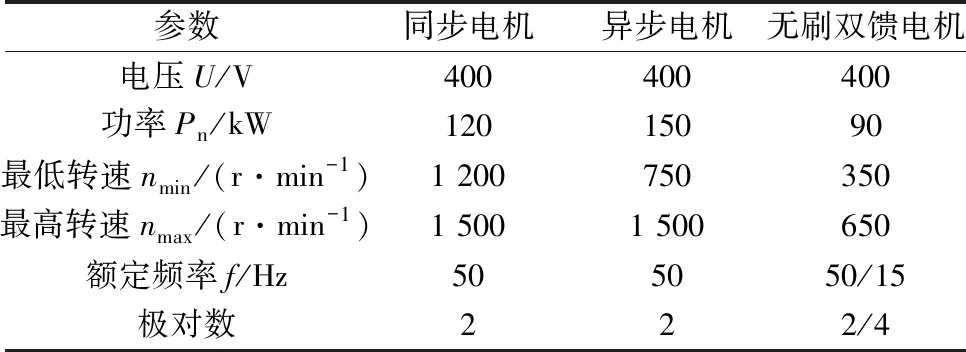
表1 三种不同电机参数
变频器的输出连接到四个电阻箱,最大可以提供60 kW负载,为整个轴带系统提供负载输出。为了实现最为苛刻的性能考察,本实验主要通过负载开关的投切来考察瞬态负载变化对于轴带发电系统的稳定特性和动态特性的影响。被试变频器中的网侧和机侧是完全相同的硬件,通常称为背靠背结构。控制器采用x86 Celeron 650 MHz CPU的控制器,满足0.4 ms的控制回路的刷新时间,产生2.5 kHz的PWM信号。
3.2 实验数据
3.2.1 同步发电机实验数据
图9给出了采用同步发电机在额定转速1 500 r/min下突加负载的数据。本实验中,负载突加90 kW,即同步发电机额定功率的75%。由图9(a)可以看到,电网电压产生了一个瞬间大约20 V(5%)的跌落,然后迅速回复正常。有功电流iq的数据参见图9(b),电流追踪的动态响应非常令人满意。直流母线电压如图9(c)所示,控制在650 V左右,也比较稳定,几乎没有产生很大的波动。因此,采用同步发电机作为轴带发电系统,无论是稳定性,还是动态特性,都是令人满意的。
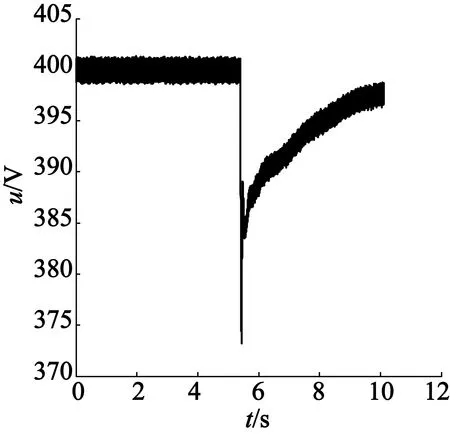
(a) 输出交流电压有效值
(b) 定子有功电流iq
(c) 直流母线电压
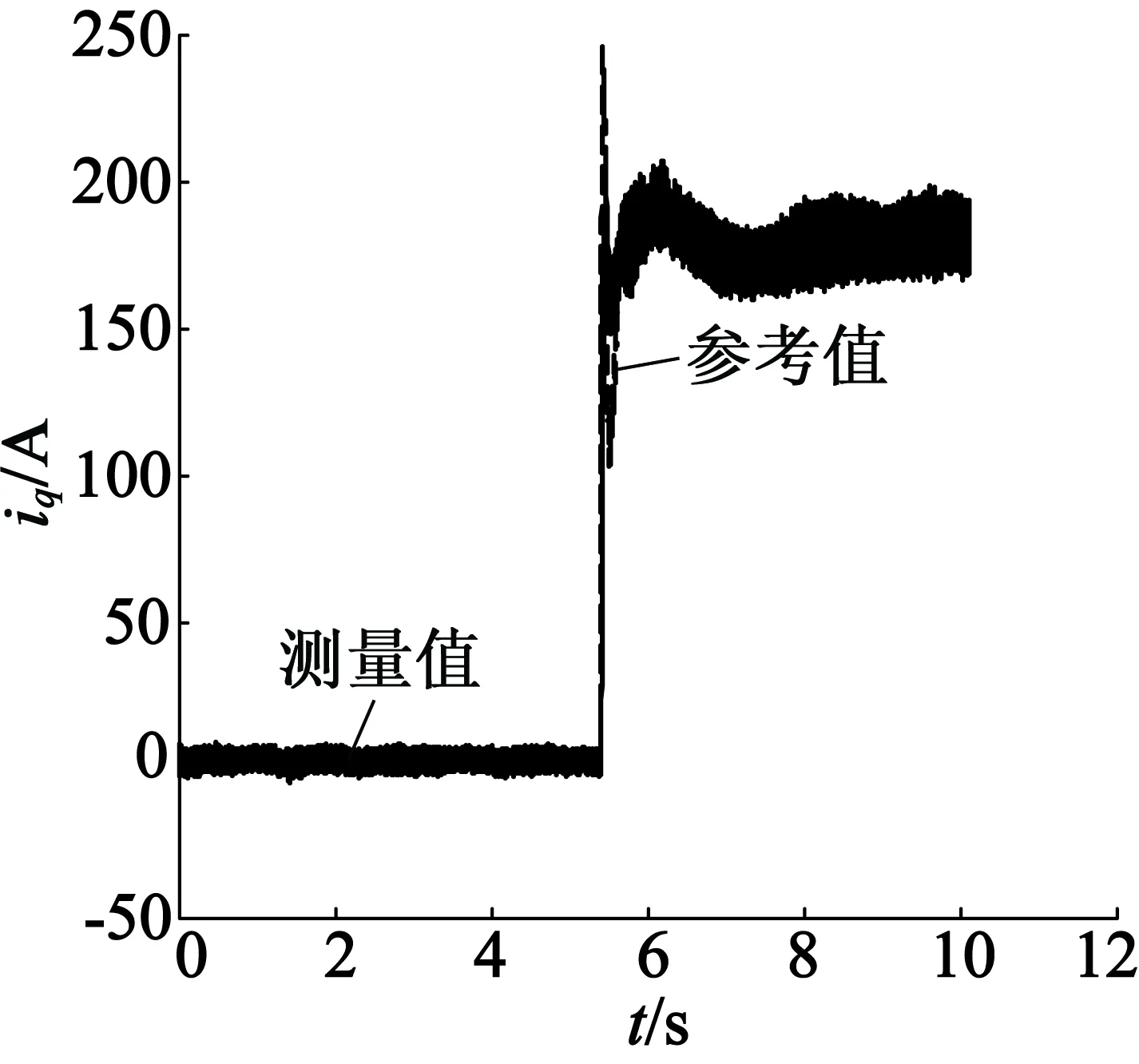
3.2.2 异步发电机实验数据
图10给出了采用异步发电机在额定转速1 500 r/min下突加负载数据。本实验中,突加负载100 kW,即异步发电机额定功率的67%。从图10可以看出,采用异步发电机可以获得和同步发电机轴带系统很类似的性能,无论是输出电压波动、直流母线波动,还是电流控制[11],都可以达到指标需求。
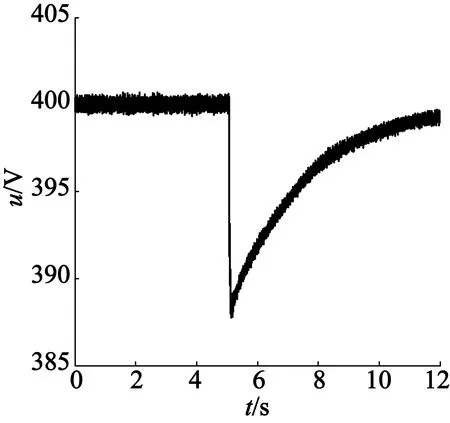
(a) 输出交流电压有效值
(b) 定子有功电流i2q
(c) 直流母线电压
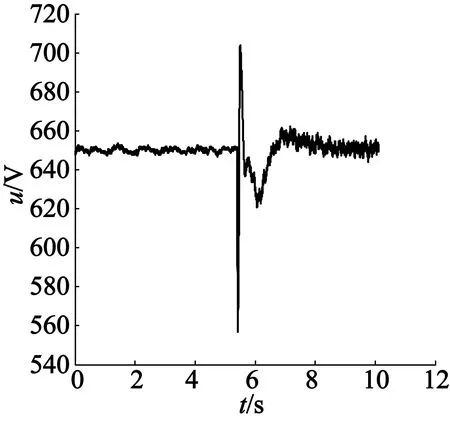
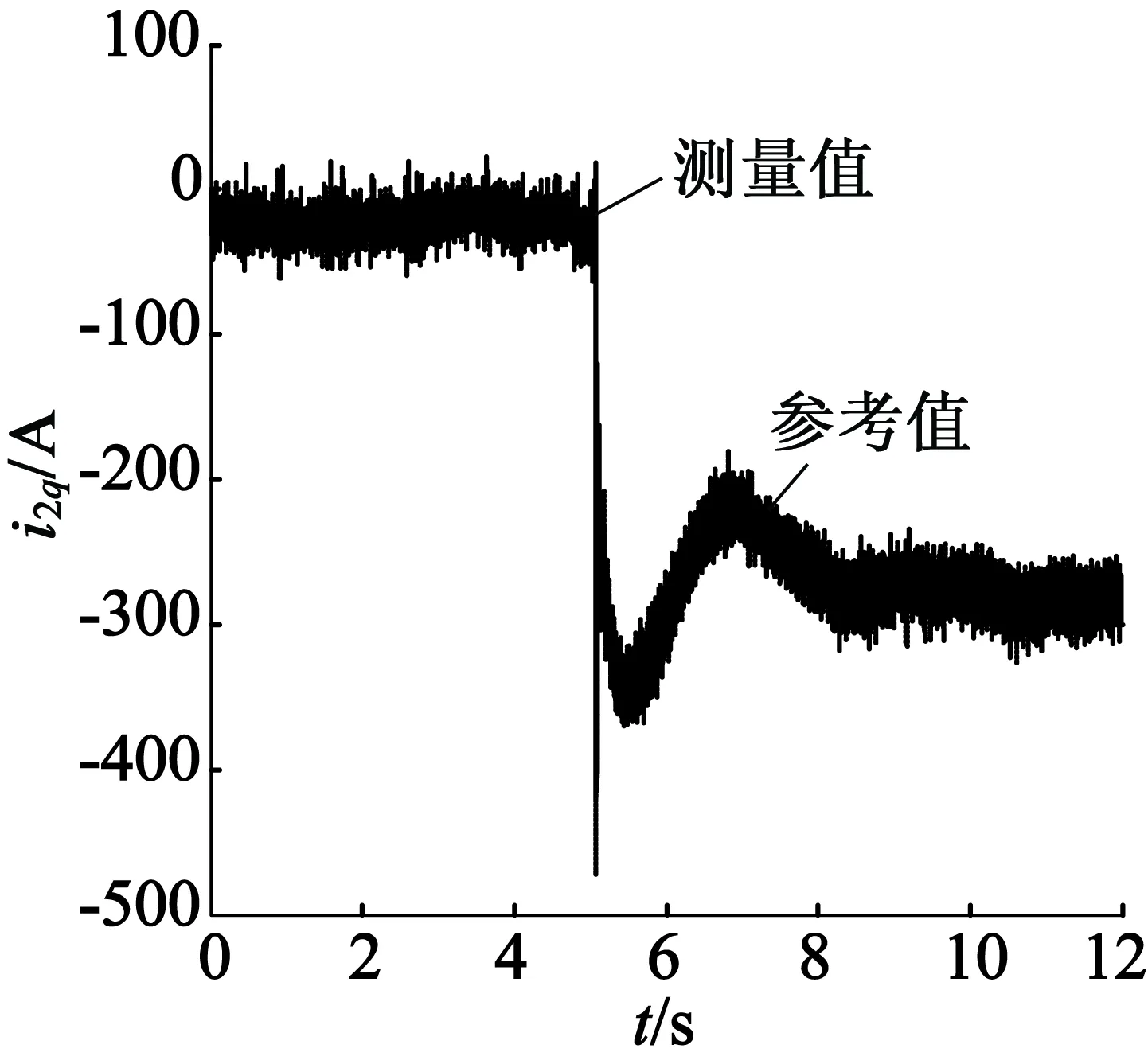
3.2.3 无刷双馈发电机实验数据
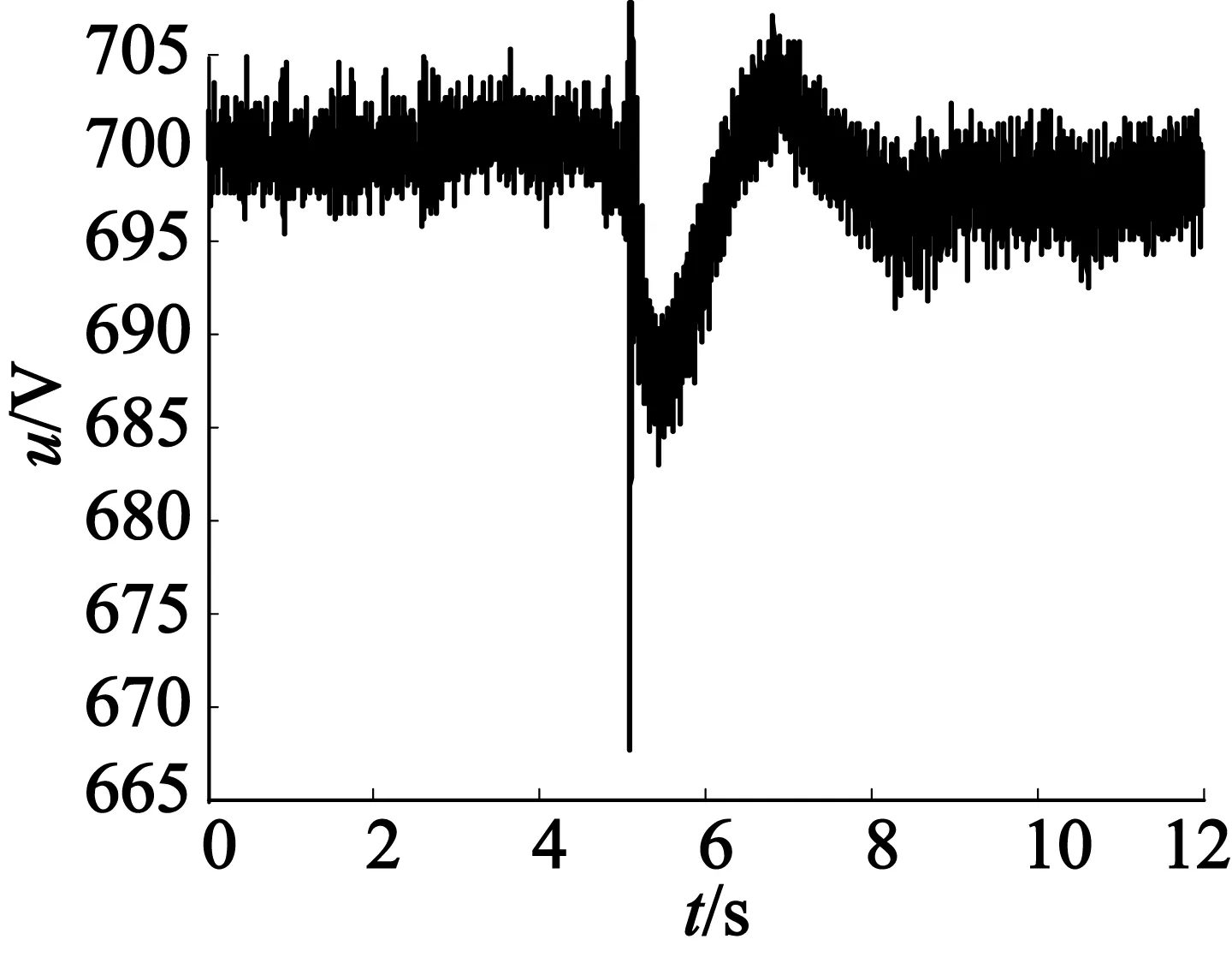
图11给出了采用无刷双馈发电机在转速600 r/min下突加负载的数据。本实验中,突加负载15 kW,即无刷双馈发电机额定功率的17%。可以看到,在电压波动上,电压瞬间降低了约11%。无刷双馈的电压/功率控制最终是通过对于控制绕组的电流控制来实现的;在电机控制绕组有功电流i2q的控制上,虽然测量值仍然可以跟踪,但是动态性能远远不如同步发电机和异步发电机,这是因为无刷双馈电机的控制绕组和功率绕组在d和q轴的坐标系之间具有较强的耦合性,需要通过PI控制器慢慢补偿,正因为控制绕组和功率绕组本身也有耦合性,所以直流母线电压波动较大。如果负载出现更大容量的扰动,整个控制系统可能会出现不稳定。
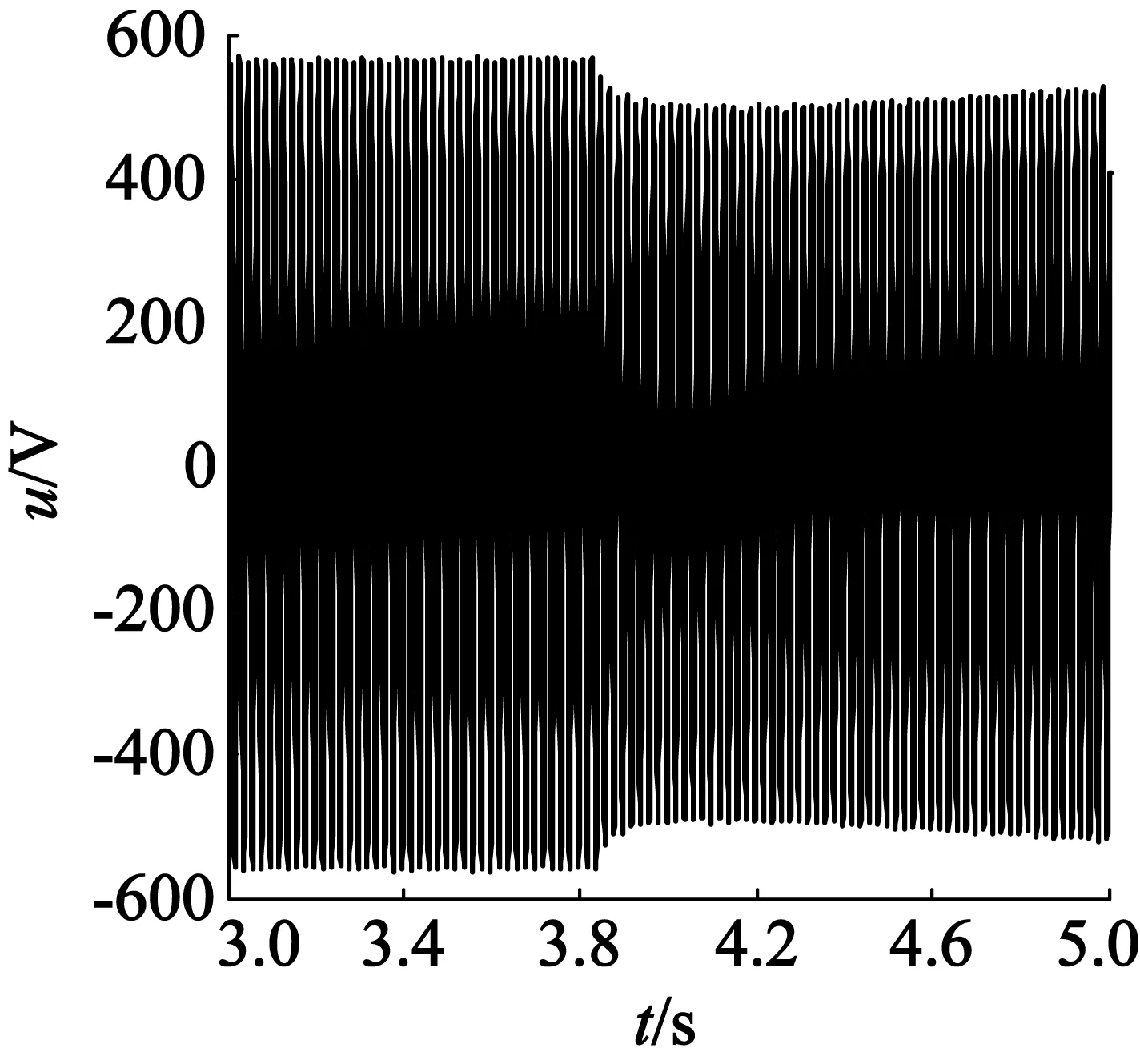
(a) 输出交流电压即功率绕组电压
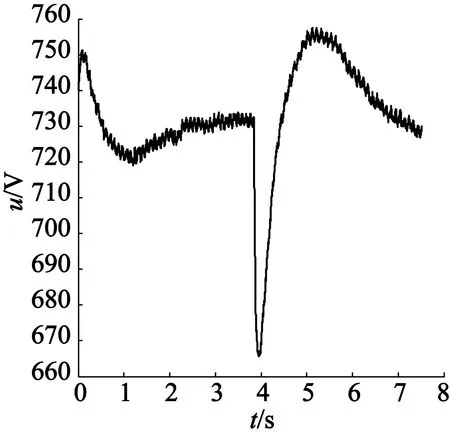
(c) 直流母线电压
4 结 语
本文分析了无刷同步发电机、异步发电机和无刷双馈发电机作为轴带发电机的特点,并对这三种发电机的优缺点做出了比较,如表2所示。从控制特性来说,采用同步发电机和异步发电机可以达到比较好的控制性能,使用无刷双馈发电机作为轴带发电机也可以实现稳定的控制,但是控制系统的动态性能相对较差。
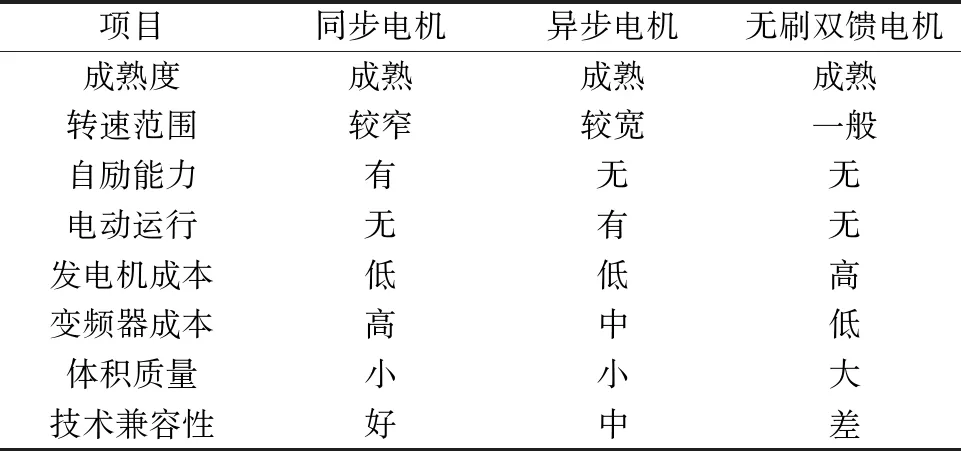
表2 三种发电机的优缺点比较
