谨慎审视“网联汽车”与“自动驾驶汽车”技术概念的区别与意义
2019-07-30官阳
官阳
近两年,随着汽车工业和通信技术的发展,车辆的自动功能与通信技术快速提升,甚至出现了网络公司开始造车的苗头,这就出现了两个非常重要的英文概念,一个是“Connected vehicle”(简写为CV,国内翻译成网联汽车的较多),一个是“Automated vehicle”(简写为AV,国内翻译成自动驾驶汽车或无人驾驶汽车)。这两个全新的技术概念,目前在国内都有企业和媒体使用,但是其背后的含义与外延却鲜有被提及。甚至很多地方都批准了开放道路的自动驾驶测试,却还不知道路网上需要哪些技术元素去配合这些测试。
根据美国公路和运输官员协会(ASSHTO)与美国国家公路合作研究计划(NCHRP)的文件显示,CV和AV是两个有明确不同技术含义的专属名词组。我们使用时如果不注意其中的技术区别,就很容易因为中文文字的丰富内涵,导致技术边界的模糊,甚至将舆论和研究工作引向歧途。比如很多人会把网联汽车技术和自动驾驶汽车技术的重点放在5G通信和北斗卫星定位系统上,甚至是无人驾驶上,畅想这些技术就在未来某一天让机器人来接你上下班,却完全忽视了这两种技术在演进过程中那些非常扎实的每一个技术进步。
根据美国国家公路合作研究计划(NCHRP)的文件介绍,“网联汽车,是研发可以实现车与车之间(V2V)、车与基础设施之间(V2I)、车与出行者之间(V2X)进行安全互动的网络内无线通讯的技术。这些技术的研发,是为了减少交通事故,为了给运输系统提供数据评估运营水平,为了向出行者持续提供准确的道路运输系统运营状态的准确信息,减少无谓的停顿、延误和排放。”
这种网联,其实指的就是一个信息处理系统,一方面是车载信息采集系统(机器视觉识别和无线、光信号等),一方面是道路上的各种信息,包括路面、标志标线、车辆、非机动车(大号的行人)和行人等,这个网联环境要帮助人类处理这些信息,以支撑驾驶任务的完成。所以从车的角度讲,叫Connected Vehicle,即网联汽車;从路的角度讲,叫Connected Road,即网联道路,就是要让道路基础设施更好地支撑汽车行进,比如优化标志标线的显示质量,提升机器视觉的效率等。
自动驾驶汽车技术则是指利用车辆的自动功能完成关键性的安全识别和驾驶任务,探测道路条件,其主要依靠的技术途径是机器视觉、雷达、激光和无线电信号等。尽管这种车辆自动识别通行条件、自动完成控制、指示和导航的技术会逐步提升,业界相信,随着这种车辆技术的发展,将明显地改变道路路网的规划、设计和运行特点。
美国国家公路合作研究计划(NCHRP)的文件指出,“网联汽车与自动驾驶汽车在本质上是完全不同的技术。尽管它们对交通运输部门提出的挑战有些是相同的,但这两种技术在研究发展的过程中,即使针对同一挑战,也可能会由于企业的选择出现趋同或者分歧。有些人相信,一辆完全自动驾驶的汽车并不需要与其他道路元素有沟通,而另一些人则认为车路之间的技术沟通是相互伴生的需要。”
汽车的感知器官越来越发达,各种辅助驾驶系统正在提高人的感知能力,图1中所列的自适应巡航、紧急刹车制动、行人警示、防碰撞、泊车辅助、环车身图像采集、盲区侦测、行车道偏离警示和标志识别等功能都已经陆续实现了。随着自动驾驶技术的不断升级,这些技术会越来越好,但也都会遇到一个问题—— 一旦遇到需求,如何能让人顺利接管,而人又靠什么在路上操作车辆正确行驶。
为什么要准确区分这种技术呢?因为这些技术将深刻地影响交通运输的方方面面,特别是路网的基础设施建设,如果不尽早地从投资特别是基础设施资金使用效率的角度思考,这些新技术的出现会造成巨大的浪费。在这方面,我们就管窥一下网联汽车和自动驾驶汽车的主要推动国之一的美国正在关注哪些领域的问题。
2014年底,美国政府交通部联合私营机构,启动了一个对网联汽车和自动驾驶汽车的研究项目,项目编号NCHRP Project 20-102(美国国家公路合作研究计划),研究资金650万美元。其主要任务清单包括如下内容:
1.网联汽车和自动驾驶汽车系统被纳入市场决策后对社会政策和规划工作的影响
2.网联汽车和自动驾驶汽车技术的法规和政策在公共交通运营领域的影响
3.卡车货运使用网联汽车和自动驾驶汽车技术的挑战
4.美国国家公路合作研究计划20-102号研究项目的沟通战略计划
5.用于机器视觉的道路标线
6.自动驾驶对车辆法的影响
7.网联汽车和自动驾驶汽车专用或优先车道
8.网联汽车和自动驾驶汽车对地方交通运输规划和模式影响的更新
9.网联汽车和自动驾驶汽车技术对国家和地方交通运输机构的网络安全的影响
10.按需流动和自动驾驶系统:一个公共部门的评估框架
11.建设网联汽车的基础设施以支撑自动驾驶汽车运行的各种业务模式
12.应用网联汽车和自动驾驶汽车所需要的规划数据和采集技术
13.网联汽车和自动驾驶汽车运行应用所需要的数据管理战略
14.网联汽车和自动驾驶汽车对公路基础设施的影响
15.为网联和自动驾驶汽车做交通事件管理响应的准备
16.开源应用程序开发门户(OSADP)上网联汽车数据应用的实施指南(Open Source Application Development Portal)[注:美国交通部为开发网联汽车原型应用程序提供了大量资金。现在在开源应用程序开发门户(OSADP)上,有各种各样的原型数据可供公众访问]
17.自动驾驶汽车运行和碰撞事故分析需要的最少安全数据
18.美国国家公路运输官员协会对网联汽车和自动驾驶汽车研究路线图的更新
19.国家与地方机构劳动力能力战略
20.为改善自动驾驶汽车运行所做的基础设施修改
21.高自动化驾驶车辆与共享出行对出行者行为的潜在影响
22.网联和自动驾驶汽车与共享出行的基础设施助推器——近期和中期
仅仅从这一个研究项目看,就能感受到美国交通部对网联汽车和自动驾驶汽车研究、部署和实施考虑的周密和认真。从科研、应用、社会、法律、基础设施、人文、劳动力等各个方面做前期的准备。从这个研究任务清单也可以看出,网联汽车其实远不是网络和车辆技术一花独放,而需要大量的配合,特别是基础设施。针对这些任务,本文仅举一个例子,即道路标线。
按照目前国际汽车厂家的预测,到2023年,全球71%的新车将安装LDW(Lane Departure Warning),也就是车道偏离警告系统,事实上,2019年,已经有约39%的新车安装了这个系统。其技术原理就是,通过车载的机器视觉系统读取车道标线,一旦发现车辆有偏离行车道的现象就会发出警报,提醒驾驶人。如果标线的显示质量无法被车载视觉系统识别,这个功能就等于浪費了。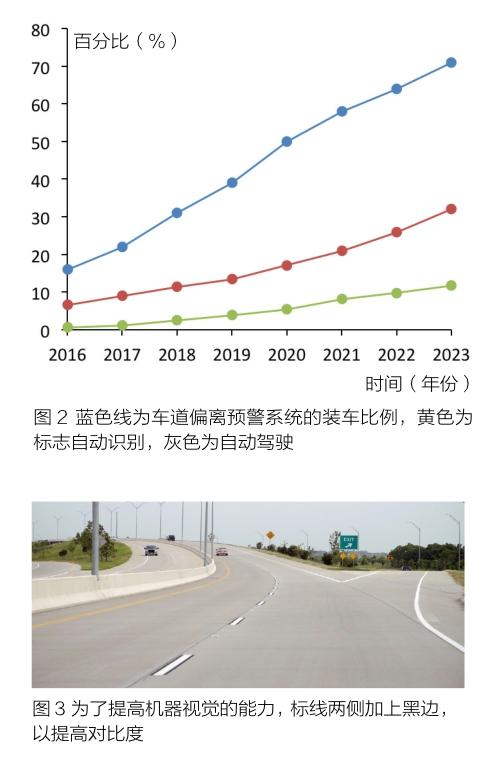
为什么保持车道的技术系统会被汽车厂家首先研发呢?研究显示,有49%的致命事故和73%的与天气有关的碰撞事故都与偏离正常行驶的车道有关。而道路标线增加亮度(即可视性)可以减少28.3%的事故,使用雨夜反光标线可以减少25%的事故。
从上述角度可以发现,对于网联汽车和自动汽车行驶环境的测试,其实是一项完善和周密的系统工程,如果某个城市提出他们已经建成了自动驾驶开放式道路的测试环境,但是在道路基础设施上并没有做有针对性的改善,甚至没考虑夜间和雨夜的标线识别问题,也就是连目前已经有近40%的新车都安装了的车道偏离警告系统都无法使用。这样的创新热情和科研理想,与现实技术环境和在可预见的将来能有的车辆自动安全技术,有什么样的距离呢?
