基于机器视觉的电动机转轴轴承安装部位外径对比测量
2019-07-25刘凯陈绪兵毛金城周瑞丰
刘凯,陈绪兵,毛金城,2,周瑞丰
(1.武汉工程大学 机电工程学院,武汉 430205;2.湖北坚丰科技股份有限公司,湖北 孝感 432900)
转轴是电动机的重要部件,支承各种转动零件,传递转矩,输出机械功率,轴承安装部位(轴承位)更是转轴的关键位置,其安装精度直接影响电动机的运行状态,会引起电动机振动及噪声过大等问题。国内轴类零件的测量基本处于使用游标卡尺、千分尺、气动量仪等工具进行手动检测阶段,不仅劳动强度大,作业效率低,而且容易发生错检或漏检,检测结果受技术人员的技术水平和精神状态的影响,无法保证检测结果的精确性和可靠性[1]。
相较于传统的测量技术,基于图像处理和机器视觉的检测技术采用非接触式测量方式,可以避免给转轴带来额外的损伤,具有一定的适用性,而且可以实现其他测量方法无法实现的测量。另外,其具有检测速度快,检测精度高,柔性高,自动化程度高等特点,是现代制造领域不可或缺的测量技术。因此,针对电动机转轴轴承位外径尺寸的测量,提出了一种基于机器视觉技术的高精度测量方法,对图像进行边缘定位,通过最小二乘直线拟合得到边缘直线,精确计算出转轴轴承位的外径尺寸。
1 检测系统原理
提出一种基于CCD传感器的转轴轴承位外径尺寸的图像对比测量方法。使用2个面阵CCD分别采集某已知外径的合格标准轴左右边缘图像,然后保持相机和V形槽底座固定不动,在相同条件下分别采集待测轴左右边缘图像,通过图像处理与分析得出各边缘直线方程,分别计算出标准轴与待测轴左、右边缘的间距,最后计算待测轴与标准轴外径之间的差值,以此间接获得待测轴的外径尺寸。
测量系统若使用单相机采集整个轴承位对象直接进行处理和分析,则需要的镜头视场相对较大;而使用双目视觉分别采集标准轴与待测轴的边缘图像,则可使用小视场镜头。而在相机分辨率不变的情况下,使用小视场镜头可以提高系统的像素精度。
由于电动机转轴是不透明的金属材料,为有利于后续的图像处理,特采用背光获得高对比度的图像[2]。使用平行光源背光照射于转轴上,使转轴尽量处于照明均匀的可控背景中,通过光学系统,在面阵CCD的光敏面上成像。通过图像采集卡将待测轴的图像转换成数字图像,计算机对采集到的图像进行处理,提取出预期的特征和数据,然后对零件尺寸进行快速、精确的计算。检测系统的原理和系统装置示意图分别如图1、图2所示,系统采用的CCD摄像机分辨率为1 624 pixel×1 224 pixel,像元尺寸为4.4 μm。

图1 系统检测原理
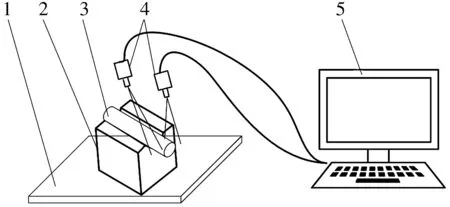
1—平行光板;2—V形槽;3—转轴零件;4—CCD相机;5—计算机
2 图像预处理
某型转轴实物如图3所示,轴承位的整体形态如图4所示。为了能够更好地检测零件尺寸,需要对采集到的待测零件数字图像进行一系列的处理,从而获取预期的内容。

图3 转轴实物图
图4 轴承位整体形态图
如图5所示,图像预处理的过程为:将采集到的彩色数字图像转换为灰度图像,去除非必要的颜色信息,保留梯度信息,以缩小存储空间并大幅提高运算速度;图像平滑处理,消除图像中的噪声;边缘检测,提取转轴的边缘轮廓,便于后续的边缘直线拟合。
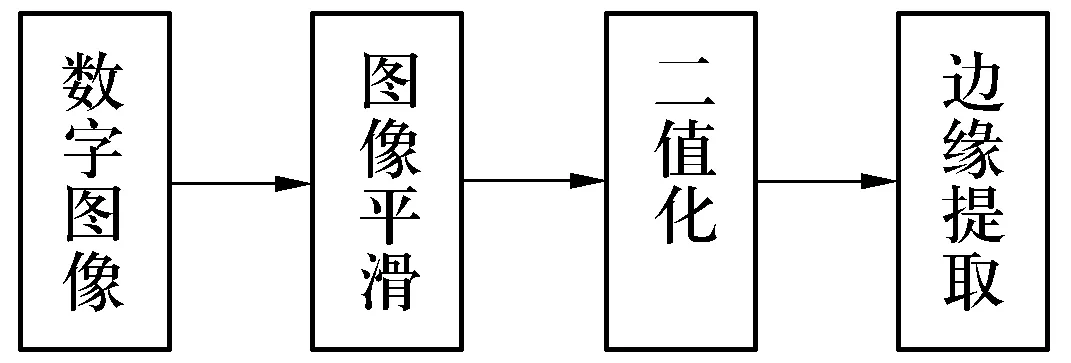
图5 图像预处理流程
2.1 图像平滑
在图像的采集和传输过程中,不可避免会受到各种噪声的干扰,降低了图像质量,导致检测过程中产生分析和测量误差。为减小分析误差,提高检测精度,有必要平滑图像以去除图像中的噪声[3]。数字图像中常见的噪声包括椒盐噪声、高斯噪声等。可以在空间域或频率域中根据图像中噪声的不同特性采用不同的滤波方法消除。空间域中的图像平滑可以使用线性滤波器和非线性滤波器;在频域中,噪声频谱主要在高频段,可以使用各种形式的低通滤波器抑制高频分量,去除噪声。使用适当的滤波方法去除噪声是检测过程的重要部分。
数字图像的平滑通常在空间域进行,均值和中值滤波器是2种常用于空间域的平滑处理技术[4]。前者也称为平滑线性滤波,是典型的线性滤波,其思想是用像素邻域内各像素的灰度平均值代替该像素原来的灰度值,处理速度快,但会出现一定程度的模糊,模糊程度与所用模板的大小有关;后者是一种最简单的非线性滤波,将每一个像素点的灰度值设置为邻域中所有像素灰度值的中值,中值滤波在一定条件下能够克服线性滤波造成的边缘模糊等缺点。因此,采用5×5模板的中值滤波对原图像进行平滑,原图像与中值滤波图像如图6所示。
2.2 边缘检测
图像的边缘信息是重要的图像特征,是图像中局部亮度变化最明显的部分,包含大量的有用信息。因此,在轴类零件的测量中,零件边缘特征的提取至关重要。
要提取边缘轮廓,需要先在滤波后的图像中提取检测对象,将背景分离。采用最大类间方差(Otsu)法[5]对中值滤波图像中的前景与背景进行分割,最大类间方差法是一种自适应的阈值确定方法,选取能使类间方差达到最大的图像灰度值,2个区域的方差越大说明构成图像的2个部分差别越大,以此分割出前景区域和背景区域,此时的灰度值即为图像分割的最佳阈值。得到的二值化图像如图7所示。
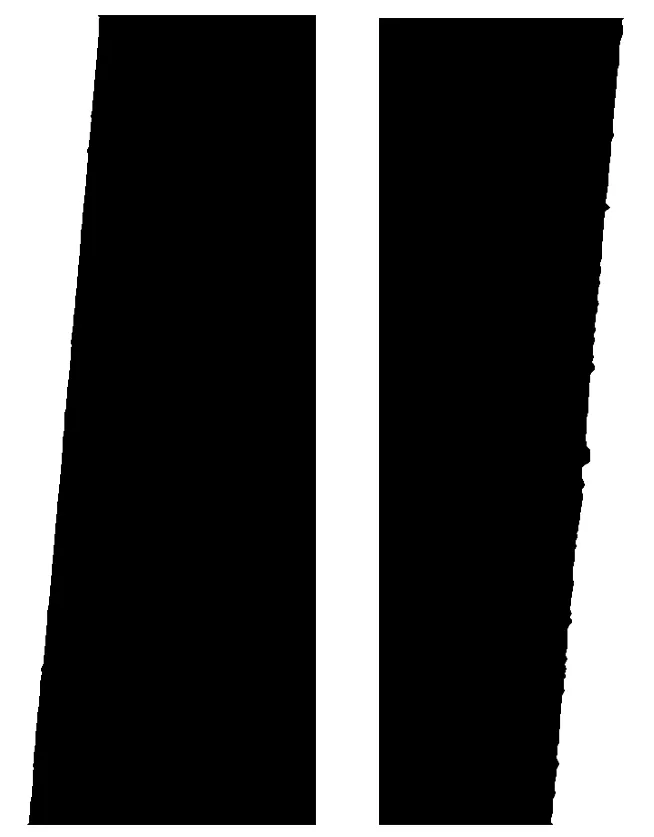
图7 待测轴的二值图像
采用DoG(Difference of Gaussian)边缘提取对二值图像进行处理。DoG是计算机视觉和图像处理的一种常用高通滤波器,通过增强高频信号过滤掉低频信号,常用于检测图像中的线条特征[6]。DoG边缘检测通过使用不同参数的高斯函数与图像f(x,y)进行卷积计算,首先使用核为σ1的Gauss函数与图像作卷积
F1(x,y)=Gσ1(x,y)*f(x,y),
(1)
(2)
再将图像与另一个核为σ2的高斯函数作卷积
F2(x,y)=Gσ2(x,y)*f(x,y)。
(3)
DoG就是2个不同高斯平滑图像之差,即
F1(x,y)-F2(x,y)=(Gσ1(x,y)-
Gσ2(x,y))*f(x,y)=DoG*f(x,y),
(4)
DoG=Gσ1(x,y)-Gσ2(x,y)。
(5)
采用σ1=0.3,σ2=5的参数进行计算,得到如图8所示的边缘图像,图8a中边缘轮廓右边为轴体,图8b中边缘轮廓左边为轴体。
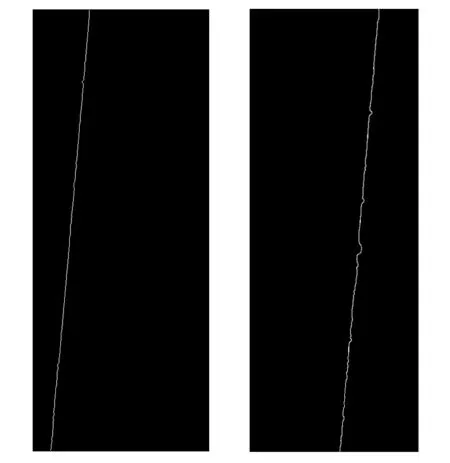
图8 待测轴的边缘图像
3 外径尺寸计算
经过图像预处理,分别获得了某标准轴的左右边缘图像Sl,Sr和待测轴的左右边缘图像Tl和Tr,在得到的边缘图像上提取边缘点的像素坐标(xi,yi),对图像中的坐标进行拟合得到目标的连续函数,从而确定描述物体的各个参数值,进而对目标进行亚像素定位。采用最小二乘法原理拟合图像边缘离散点,实现亚像素精度定位[7]。拟合出边缘直线的表达式后,就可以计算标准轴和待测轴左右边缘直线之间的距离,然后分别得到左右边缘直线之间距离的差值,将2个差值求和,即可得出待测轴与标准轴外径的差值,从而计算出待测轴的外径尺寸。
设直线的表达式为
y=kx+b。
(6)
根据最小二乘原理,需要使拟合直线与边缘点距离最近,即令
(7)
ySl=-11.359x+1 342.077,
(8)
ySr=-11.648x+3 090.728。
(9)
待测轴左、右边缘直线方程yTl,yTr分别为
yTl=-11.708x+1 338.512,
(10)
yTr=-11.539x+3 085.766。
(11)
根据直线方程,取待测轴左边缘直线上的N个点,根据点到直线的距离公式,即点T0(x0,y0)到另一条直线Ax+By+C=0的间距公式为
(12)
根据(12)式计算出待测轴左边缘直线上点到标准轴左边缘直线距离的N个结果,再求平均值得到待测轴与标准轴左边缘直线之间的距离,即待测轴与标准轴左边缘间距dl=2.651 pixel,同理可以计算出待测轴与标准轴右边缘间距dr=-1.701 pixel,则外径最终间距为dt=dl+dr=0.95 pixel。
为计算出直径的实际值,需要对相机进行标定[8]。选择已知尺寸的量块作为标准件,在与实际测量相同的条件下拍摄量块图像,并计算其在图像像素坐标系中的像素值。量块的实际尺寸与其像素尺寸的比值即相机的标定系数。经过测量得到标定系数k=6.412 μm/pixel,根据轴径总间距的像素尺寸,可以计算出待测轴与标准值外径尺寸的实际差距,即差距的像素尺寸为dt,则差距的实际尺寸为d=dt×k=6.091 μm。
标准轴外径实际尺寸为8 mm,计算得到待测轴外径实际尺寸R≈8.006 mm,与使用气动量仪测得待测轴直径8.006 mm基本吻合,表明视觉识别精度满足零件测量精度要求。
4 结束语
基于轴类零件的检测原理,通过DoG算子对零件图像的边缘进行提取,并采用最小二乘法对边缘进行拟合,通过对标准轴和待测轴两边缘直线的距离进行计算,最后计算出待测轴与标准轴外径的差值,间接测量出待测轴的外径尺寸。试验结果表明,该方法能够对电动机转轴轴承位外径进行较高精度的测量。
