基于全自动驾驶的地铁车辆基地总平面布置方案研究
2019-07-25彭珊
彭 珊
(广州地铁设计研究院股份有限公司,广东 广州 510010)
关键字:全自动驾驶;地铁;车辆基地;总平面布置
1 背景及研究意义
全自动驾驶系统是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统[1]。随着轨道交通行业快速发展,全自动驾驶技术在该领域应用越发广泛[2]。
车辆基地主要承担车辆运营管理、检修停放等任务。全自动驾驶车辆基地还应具有车辆全自动作业功能,包括车辆自动唤醒、自动休眠、自检、自动洗车等。相对传统常规地铁基地而言,全自动驾驶车辆基地对功能分区、工艺总平面布局有更高的要求。
研究全自动驾驶对地铁车辆基地总平面设计的影响,对提高车辆基地自动化程度,提高运营效率有很重要的意义。文章以南京至句容城际轨道交通工程句容车辆基地为例,研究分析全自动驾驶地铁车辆基地总平面布置方案。
2 工程概况
南京至句容城际轨道交通工程线路长约43.642 km,其中,高架段长约26.866 km、地下段长约16.776 km,线路起终点均预留延伸条件。全线共设车站13座,其中,地下站7座、高架站6座,平均站间距3.58 km,最大站间距7.42 km,最小站间距1.287 km。南京至句容城际轨道交通工程全线设置句容车辆基地、东郊小镇停车场各1座。句容车辆基地定位为南京地铁线网B型车大架修车辆基地,承担本线、南京地铁12号线、南京地铁13号线配属列车的大架修任务,及本线配属列车的定修、临修、部分周月检及列检等运维任务。
3 总平面方案研究
3.1 用地条件
句容车辆基地选址位于句容市南郊,弘景路、104国道、小南路、圣湖大道所围地块内,出入段线从句容站接出,地块南北向长约1 436 m,东西向宽约326 m。选址现状以农田、林地为主,有少量水塘及民房,地势起伏较大,现状高程约为13.6~32.3 m。
3.2 出入段线
句容站为地下两层岛式车站,句容车辆基地出入段线从车站正线之间接出 (如下图所示),出入段线从句容站站后接出,南行下穿弘景路后出地面,继续南行上跨肖庄水库溢洪河后向东南偏转接入车辆基地,如图1所示。
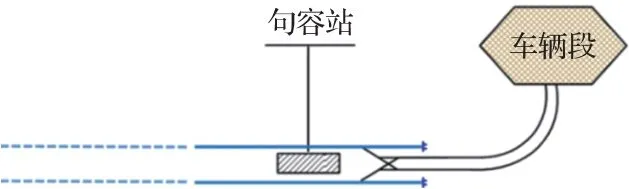
图1 出入段线平面示意图
3.3 总平面设计方案
方案一以运用库和联合检修库为主体布置,运用库和联合检修库横列式布置,场坪标高23.85 m,段内轨面标高
24 .5 m。
运用库设置在车辆基地西南。库内设置有停车列检修线、周月检线及运转综合楼。停车列检线设置15股道,共30列位;周月检线设置4股道,共4列位;运转综合楼设置在周月检线尾端,按2层布置。联合检修库位于车辆基地东南,库内设置有吹扫线1股道、静调线1股道、定修线2股道、临修线1股道、大架修线3股道,还设置有部件检修区、移车台、车体检修区、喷漆间以及辅助办公用房等。
考虑车辆基地全自动驾驶分区的需求,镟轮库与联合检修库合并设置,镟轮库前后均留有1列车的直线段。在联合检修库北侧设置有蓄电池间。特种车库设置在联合检修库咽喉区东侧。特种车库线与出入段线直接相连,调机车及工程车进出段方便。在咽喉区东侧,靠近特种车库区域为物资存放区,设置有材料堆场 (配备材料棚及材料装卸线)、易燃品库及物资库。物资存放区附近空地设置有牵引降压变电所及污水处理站。物资存放区北侧生活区内设置有综合楼、公寓楼、派出所、停车场、公务车棚等单体建筑,并在附近空地设置大件存放区及预留轮轴检修基地。
设牵出线1条,满足车辆基地内调车作业的需要,并满足全自动驾驶列车的驾驶模式转换。出入段线西侧设有洗车线及洗车库。洗车线采用八字往复式布置,洗车工艺流程顺畅,洗车效率较高。洗车划为无人区,实现对车辆的自动清洗。试车线布置于车辆基地的西侧,全有效长度约1 253 m,满足本线配属列车最高85 km/h的试车要求,列车全速试车在黄梅至宝华山区间进行。试车线划为无人区,增加对全自动驾驶功能的动态测试。
车辆基地内设环行运输道路和消防道路,设出入口2处与段外道路相连,主出入口设在车辆基地北侧,与弘景路相连,次出入口设在车辆基地南侧,与小南路相连。段内道路呈环状布置,主要生产办公房屋周围均设有环形道路,能满足生产、生活和消防要求如图2所示。

图2 总平面布置方案一
其中,洗车、停车列检、周月检作业为全自动驾驶区,其他区域为人工作业区,转换轨设置出入段线东侧,便于司机上下车。全自动驾驶区与人工作业区进行隔离,各出入口可采用人脸识别门禁系统。具体分区如图3所示。

图3 全自动驾驶分区示意图

图4 总平面布置方案二
方案二以运用库和联合检修库为主体布置,运用库和联合检修库纵列式布置,场坪标高21.3 m,段内轨面标高21.95 m。运用库设置在车辆基地南端。具体分区如图4所示。联合检修库位于车辆基地北端,在联合检修库南侧设置有蓄电池间。镟轮库与工程车库合并设置在运用库东侧,镟轮库前后均留有1列车的直线段,工程车库内设置有2条工程车停放线,工程车库尾部设置材料棚及材料堆场,工程车停放线1延伸至材料堆场兼顾材料装卸及新车装卸。检修库与运用库咽喉区之间设置有调机库、污水处理站及大件场地。联合检修库北侧设置有物资库、易燃品库、单身公寓、综合楼、派出所、公务车棚等单体建筑,并预留有轮轴检修基地用地。出入段线西侧设有洗车线,采用往复式布置,洗车流程顺畅。试车线布置于车辆基地的东侧,靠近检修库设置,全线为平直线,试车线长约1 174 m,满足本线配属列车最高85 km/h的试车要求。
以上分析可知:两个方案均可满足车辆基地生产功能需要,方案一的段内调车作业及工程车上线作业更为方便。因此,通过对比分析研究,确定方案一更为合理,如表1所示。
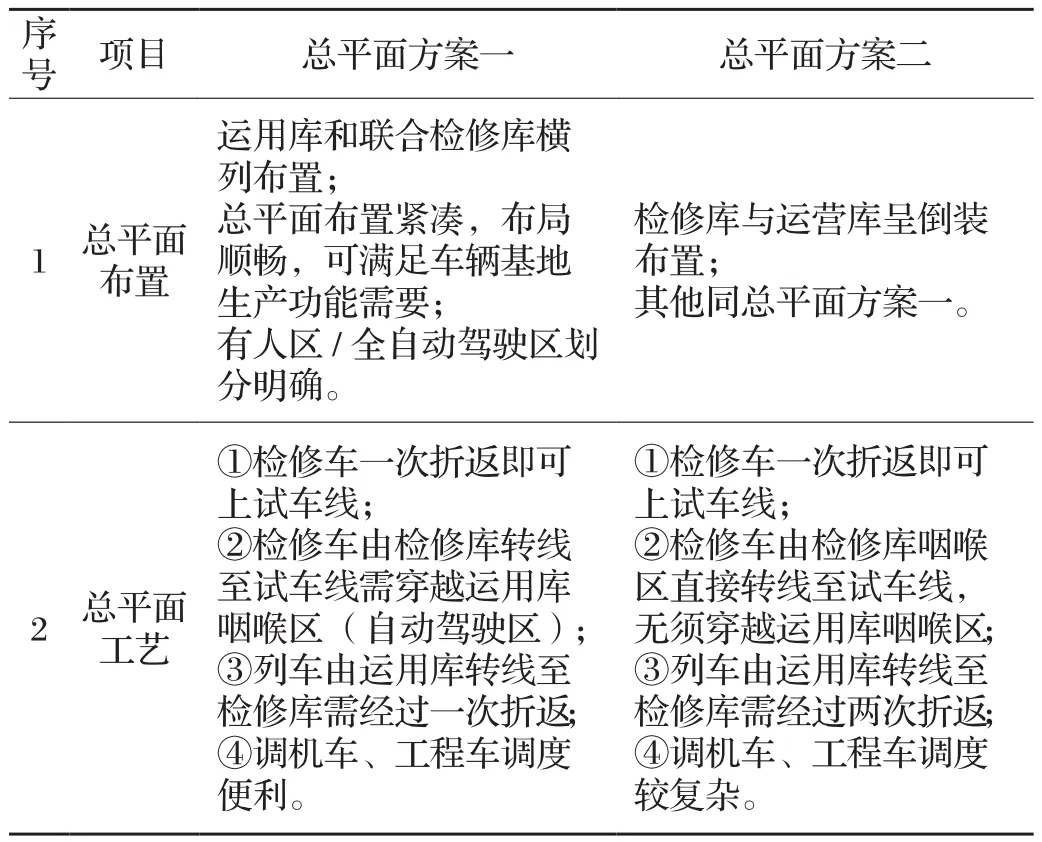
表1 车辆基地总平面方案对比表
4 结语
基于全自动驾驶技术,分析有人区/全自动分区、转换轨设置对地铁车辆基地总平面设计的影响,结合句容车辆基地工程特点,对总平面设置方案进行对比研究,主要结论如下。
(1) 全自动驾驶地铁车辆基地总平面设计时,功能区划分应明确,有人区与全自动驾驶区应进行有效隔离,可采用人脸识别门禁等安防措施。
(2) 洗车线宜划分全自动驾驶区,布置入段一侧,实现车辆全自动入段洗车。
(3) 试车线可划分全自动驾驶区,并增加对全自动驾驶功能的动态测试。
(4) 车辆基地内增加车辆全自动驾驶与有人驾驶模式切换的转换轨,可与检修用牵出线合并设置,在轨旁设有人驾驶用登车平台,方便运营使用。
