快速路智能协同控制的影响因素研究
2019-07-25李敢
李 敢
(中国城市规划设计研究院深圳分院,广东 深圳 518055)
当前,城市快速路交通拥堵日益严峻,引发延误增加、环境污染、交通安全等一系列问题。针对上述问题,限于土地、资金等方面的因素,传统粗放式增建快速道路已很难取得良好效益。相反,协同多种控制策略对快速路进行有效控制,实现对道路资源的充分利用,成为缓解交通拥堵的一剂良方。
目前,协同控制在理论研究及工程实践中取得了一定的成果,其中,最显著的是匝道控制和可变限速控制的协同控制,但以往研究缺乏对协同控制影响因素的系统梳理。基于此,文章运用文献综述的方法,展开深入探索及研究,全面地梳理与分析快速路协同控制的影响因素,为协同控制在我国快速道路上的理论研究及实践应用提供依据。
1 快速路智能协同控制概述
1.1 快速路概述
快速路是在城市内修建的,中央分隔、全部控制出入、控制出入口间距及形式,具有单向双车道或以上的多车道,并设有配套的交通安全与管理设施的城市道路。快速路与高速公路及其他等级城市道路存在显著区别,其最重要的三个交通特点为交通管理与控制相对简单但方式丰富、交通流特性与交通组成相对简单、出入口密度较高。
1.2 交通流恶化过程
当快速路交通量小于路段通行能力,主线车辆所受干扰较小,交通流稳定且快速通行。当交通量持续增加,超出通行能力时,在不采取任何控制措施的条件下,交通流难以稳定运行,最终形成交通堵塞,并伴随两种明显现象:通行能力下降和交通流溢出。交通拥堵后,自由流状态下的车头时距将无法维持,导致道路通行能力下降。A点变化至B点,通行能力大约降低10%~30%[1]。此外,由于拥堵导致入口匝道出现排队现象,当排队长度超过其最大承载能力时,产生交通流溢出现象,如图1和图2所示。

图1 通行能力降低示意图

图2 交通流溢出现象
1.3 智能协同控制
组合多种控制方式对快速路交通流进行控制与管理,能够有效地抑制交通恶化,避免交通拥堵,例如,实施匝道控制和可变限速的协同控制。
匝道控制 (RM) 通过控制匝道驶入交通量,减小匝道对主线车流的干扰,避免交通流恶化。可变限速控制 (VSL)利用物联网、电子感应等技术手段,收集道路、交通、环境等条件信息,综合分析各项信息,合理选择控制算法确定限制速度值,保证车行安全条件下实现最佳的交通流量和密度。
2 协同控制影响因素
协同控制涉及内容多且广,如模型算法、协同方式、道路及交通条件、设计指标等,因此,影响协同控制效果的因素很多。文章主要从理论方法、技术应用和其他三个方面系统地梳理与分析协同控制的影响因素,如图3所示。

图3 快速路协同控制影响因素
2.1 理论方法
2.1.1 控制算法
匝道控制和可变限速控制通过相应算法实现。采用不同算法,协同控制实施效果将存在显著差异。匝道控制有多种类型,如单点控制与协调控制,对于同一类型匝道控制,又存在不同控制算法。对于单点控制,常见算法有Demand-Capacity控制法,Occupancy控制法,模糊控制法,ALINEA算法以及ALINEA的改进算法。M.Greguri等对比了三种匝道控制算法,研究发现,ALINEA算法由于各匝道孤立缺乏联系导致其产生平均行程时间与平均延误最大;HELPER算法产生的平均延误、总行程时间以及平均排队数最小;SWARM算法产生的平均行程时间最小,但造成了更多的延误[2]。
可变限速控制策略可简单分为被动控制与主动控制。被动控制是基于规则的简单逻辑控制,其限制速度根据交通流量、占有率或平均速度等指标进行设置。PEI-WEI LIN等提出VSL-1和VSL-2两种被动控制算法,结果显示,对于改善交通流运行效率,VSL-2控制效果更优[3]。
在被动控制的基础上,主动控制引入预测模型预测交通流状态, 提前调整控制输出以应对未来交通流恶化。目前,预测模型多为Payne第二代模型的改进版本,这些改进模型因采用的期望速度表达式不同,导致控制效果也不尽相同。
此外,可变限速控制算法还有MCS、RCP、SPECIALIST、MTFC-VSL以及COSCALv2等,这些算法对交通运行影响各有差异。Ellen Grumert等从交通安全、运行效率以及环境影响三个方面评估四种控制算法:MCS、SPECIALIST、MTFC和RCP,结果表明,MTFC控制算法在提升交通安全、改善运行效率和降低环境影响上均具有明显的优势[4],如图4所示。

图4 不同VSL算法下控制效果对比:运行效率
2.1.2 交通流模型
交通流模型分为微观模型、中观模型和宏观模型。对于快速路宏观交通流模型,除了经典的GreenShields、Underwood和Greenberg等模型外,最重要也是应用最多的模型为METANET模型和元胞传输模型 (CTM)。
在协同控制已有研究中,大多只是独立地采用某种模型,缺乏对两种模型的分析对较。在其他领域,A.Spiliopoulou等以出口匝道为研究对象,证明了METANET模型模拟效果更好,对比结果如表1所示[5]。
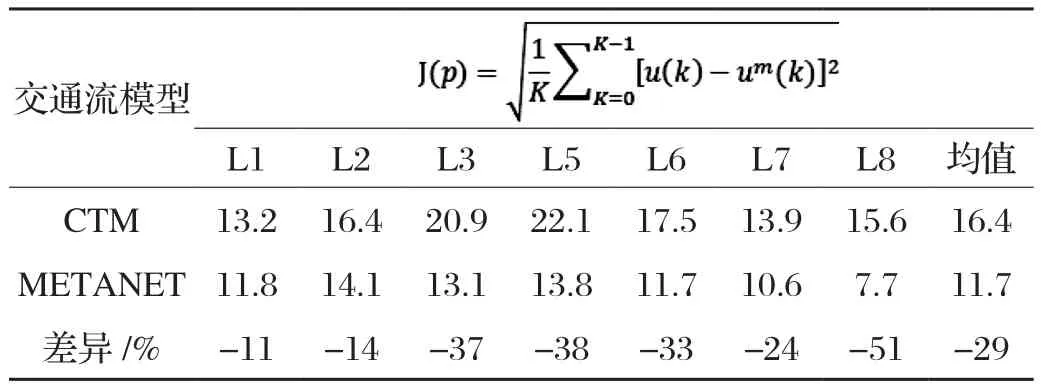
表1 不同交通流模型下控制效果对比
2.1.3 协同方式
协同方式主要有三种,匝道控制优先式[6]、可变限速控制优先式[7]以及两者同步式[8]。匝道控制优先式先确定入口匝道率,再确定限制速度。可变限速控制优先式与之相反,协同控制系统先确定限制速度,再确定入口匝道率。两者同步式在一个控制周期内实现匝道率和限制速度值得同步输出。三种协同方式各有特点,对路网的控制效果也不相同。匝道控制优先式、可变限速控制优先式以及两者同步式原理图分别如图5、图6和图7所示。

图5 匝道控制优先式原理图

图6 可变限速控制优先式原理图

图7 两者同步式原理图
2.1.4 优化目标
为保证控制效果最优,模型预测控制被广泛采用。模型预测控制由四部分组成:预测、效果评估、优化和控制。其中,优化的核心在于选择优化目标。以往研究中,优化指标可以归纳为三个方面:交通效率、交通安全以及交通环境。在交通效率方面,优化指标有总行程时间 (TTS)、总延误 (TTD)、总驶出交通量 (TTV)、车辆总行驶距离(CTTD) 以及上述组合指标。交通安全方面的指标有速度变异系数 (CVS)、事故发生概率 (PC)、待碰撞时间 (TTC)等。在交通环境方面,直观指标为燃料消耗量 (FC)、二氧化碳排放量 (CO2)、一氧化碳排放量 (CO)、碳氢物排放量(HC)、氮氧物排放量 (NOx) 等,间接指标有排放消耗比(E/FC) 等。
优化目标会直接导致输出最优化控制参数的异同,进而影响控制效果。如Bidoura Khondaker等考虑了机动性、安全性以及环境性三个维度,并改变各个维度的权重系数分别建立不同的目标函数,结果显示控制效果随目标函数的变化而显著不同,仿真结果如表2所示[9]。
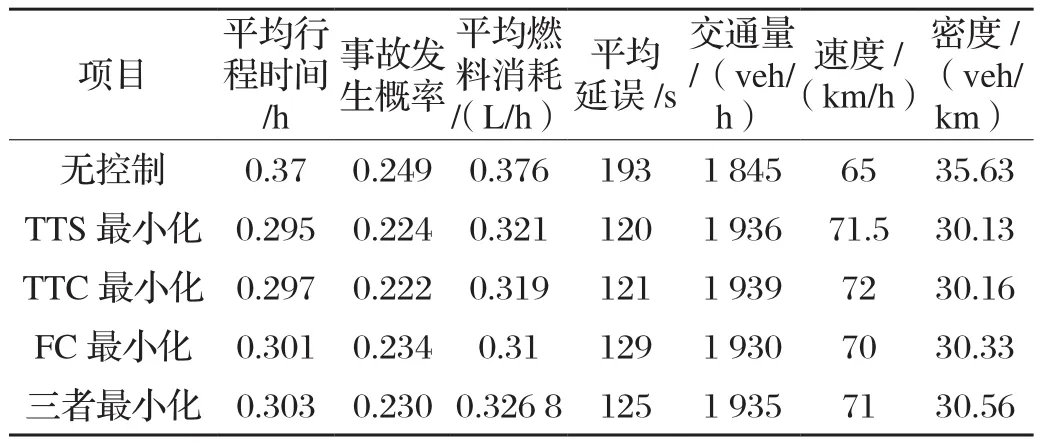
表2 不同优化目标下控制效果对比
2.1.5 控制参数
协同控制参数主要有三类:控制算法参数、交通流模型参数以及MPC控制系统参数。其中,控制算法参数主要为调整参数;交通流模型参数包括路段基础参数,路段划分长度以及模型中待标定参数;MPC控制系统参数主要有采样周期与控制周期、预测步长与控制步长等。控制参数的选取对控制效果影响显著,应结合快速路实测数据,合理标定协同系统中的参数,并进行有效性验证。
2.2 技术应用
2.2.1 道路条件
道路条件主要指道路类型与几何条件。道路类型包括快速路、出入口以及衔接道路等的类型及形式。快速路主要形式有高架式、路堤式、路堑式、地平式和隧道式。出入口类型主要有互通式立交匝道出入口、高架路匝道出入口和平面辅路匝道出入口,组合形式分四种:入口—出口、入口—入口、出口—入口和出口—出口。衔接道路类型主要为高速路、快速路、主干路、次干路、辅路等。几何条件方面影响因素包括主线横断面形式、平纵横线性、车道数及车道宽度等。
2.2.2 交通条件
交通条件影响因素主要为道路通行能力以及交通特性。道路通行能力包括主线通行能力和匝道通行能力。主线通行能力与其设计速度有关,匝道通行能力与其设计速度和坡度有关。交通特性包括交通流特性以交通组成特性,其中,交通流特性包括主线与入口匝道的交通流特性,如交通量、速度、密度三参数的时空分布特性。
2.2.3 设计条件
设计条件包含匝道控制和可变限速控制两方面的相关设计条件。对于匝道控制,设计条件主要有匝道放行方式、加速车道长度、停车线位置等。单车道入口匝道放行方式主要有单辆放行式与列队放行式,不同放行方式对应不同的入口匝道率,从而影响控制效果。可变限速控制设计条件涉及VSL应用形式、区域长度、加速车道长度、可变限速信息牌 (VMS) 数目及位置、限制速度值及更新频率等。其应用方式分为点控 (P-VSL) 和面控 (S-VSL) 两种。点控在控制区域内合理选择控制点,车辆通过控制点时需根据控制点处的可变限速信息牌调整速度,并维持此速度值直至下一控制点。面控作用于整个控制区域,一旦限制速度值发生变化,控制区域内所有车辆同时调整速度,控制区域内车辆速度并不完全一致。Eduardo Rauh Müller等研究发现S-VSL反应更加迅速,控制效果更优,P-VSL示意图如图8所示,S-VSL示意图如图9所示,对比结果如表3所示[10]。

图8 P-VSL示意图
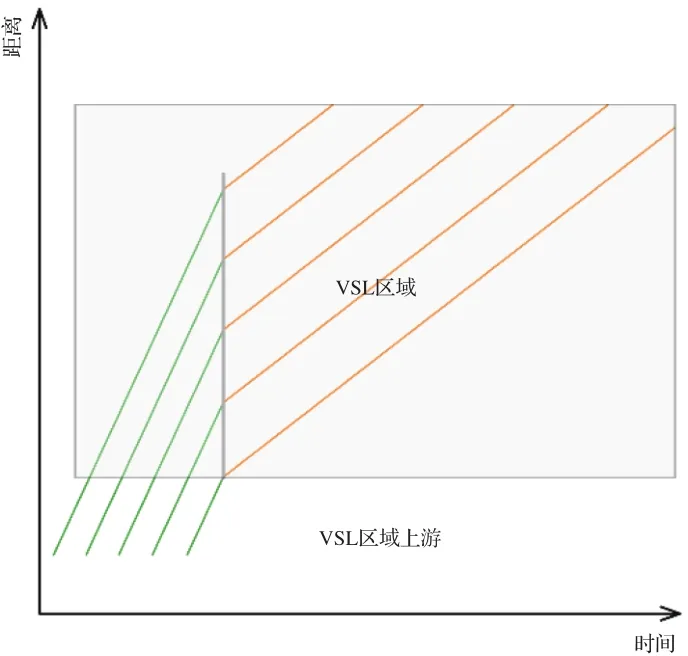
图9 S-VSL示意图

表3 P-VSL和S-VSL对比结果图
VSL区域太长,则延误增加,区域太短,车辆无法减速至限制速度。VSL加速车道指从VSL区域尾部到瓶颈路段处的路段,其长度影响控制的效果,加速车道太短,则加速不充分,车辆驶至瓶颈路段时速度不够,影响车辆合流;加速车道过长,车辆通过需要更多的时间,增加了延误。有学者研究了不同区域长度和不同加速车道长度下的控制效果,发现区域长度及加速车道分别为100、175 m时,总行程时间最小[10]。
Huiyuan Liu等[11]证明了VMS数目及位置也会影响可变限速系统的控制效果。限制速度值、限制速度差值及其更新频率对控制效果影响也很大,如M Papageorgiou等[12]发现当路段密度小于临界密度时,限制速度值越高,流量—密度曲线斜率越小。M.Tazul Islam等从机动性和安全性两个角度探寻最佳的限制速度差值及更新频率,结果显示,限制速度差值为10 km/h,且每5 min更新时,控制效果最优[13]。
2.2.4 其他条件
其他影响因素主要为遵守率和普及率。遵守率是车辆是否按照限制速度值行驶的直观反映,它直接影响显示的速度值,遵守率越高,限制速度显示值越高,反之越低。另外,随着物联网技术的发展,快速路控制相关研究开始利用技术和数据优势进行多方面的探索,如实现VSL面控制等。影响这些研究的一个重要因素就是车联网普及率,普及率越低,则可使用数据越少,模型精度与控制效果受到影响。如文献[9]对比了两种普及率下可变限速控制效果,结果显示100%普及率时控制效果显著最优。
2.3 其他因素
2.3.1 不良天气
不良天气主要包括雨天、雾天、雪天等。不良天气对快速路控制系统的影响主要表现在两个方面,一是降低能见度及道路摩擦系数,增加交通事故概率;二是车辆行驶速度下降,路段通行能力降低,导致行程时间增加,交通拥堵更易发生。
2.3.2 紧急事件
紧急事件是指能引起车道通行能力下降或交通需求增加的非正常事件,如事故、停滞、公路维护、项目重建等,它具有偶发性与不可预测性,影响控制效果,甚至导致延误和交通拥堵,引发二次交通事故。
3 结语
针对快速路协同控制影响因素展开研究。首先阐释了快速路交通流的恶化过程,指出协同控制是稳定交通流的有效手段。然后从理论方法、技术应用和其他因素三个方面系统梳理和分析了协同控制的影响因素。本研究为科学制定协同控制策略奠定了理论基础,促进协同控制在我国快速道路上有效实施,推动城市交通向现代化、智能化的方向发展,为城市解决交通拥堵、提高交通效率添一份力。
