基于无人机可见光遥感的冬小麦株高估算
2019-07-24刘治开牛亚晓韩文霆
刘治开,牛亚晓,王 毅,韩文霆
(1. 西北农林科技大学机械与电子工程学院,陕西杨凌 712100;2. 农业部农业物联网重点试验室,陕西杨凌 712100;3. 西北农林科技大学水土保持研究所,陕西杨凌 712100)
冬小麦是我国主要的粮食作物之一,其种植面积大约占粮食作物总面积的22%,产量占粮食总产的20%以上[1]。株高是作物的重要生长指标,与生物量、LAI和产量有一定的相关性,合理的株高也是作物稳产、高产的基础[2-7]。目前,测定作物生长指标的方法有传统地面测量法与间接测量法。地面测量法在时效性和便捷性方面明显存在不足。间接测量方法为基于遥感和图像系统的测量[8-14]。随着遥感技术的快速发展,基于遥感的农情监测能够快速、准确估算作物的生长指标,已成为精准农业的重要内容和研究热点[15-16]。
在作物的生长过程中,可用反射光谱和三维重建技术进行株高监测。在作物反射光谱监测株高方面,李燕强等[18]利用地面高光谱相机获取了小麦在不同波段的光谱反射率,并建立了小麦株高的估算适宜模型。隋学艳等[34]基于MODIS数据对山东省小麦进行株高遥感估算,结果表明,光谱反射率与株高在红光、短近红外、蓝光、绿光及长近红外共5个波段的相关性达到了极显著水平。不同作物的生长形态和冠层结构存在很大差别,对光谱的反射和吸收也会有所不同,因此利用光谱反射率建立的株高估测模型通用性较差。用三维重建的方法对植物株高进行监测无需考虑植物种类、光谱差异等因素的影响,因而其可广泛应用于各种植物的株高监测。如,应用激光雷达测量森林树木高度[17];基于机载小光斑全波形LIDAR对玉米的株高进行反演[19];基于激光雷达获取高粱和玉米的三维点云数据,分别建立了高粱和玉米的株高模型,通过该模型提取出的株高具有较高的精度[20]。通过机载激光雷达构成的低空遥感平台可快速、便捷地估算出研究区域内的作物生长指标[21-25];但昂贵的机载激光雷达传感器制约了低空机载遥感平台的发展。与此同时,相对廉价且技术成熟的RGB(Red Green Blue)高分辨率相机设备已经广泛地被应用在无人机遥感监测系统中[26]。通过在无人机上搭载高分辨率RGB数码相机可以获取试验区域的高清数码影像,运用动态结构算法[27]建立作物的数字表面模型(digital surface models, DSM),通过数字表面模型可进一步计算株高。近年来,许多学者基于无人机可见光遥感监测系统建立的DSM开展作物株高估测研究。如,基于无人机可见光遥感系统获取的影像点云数据建立甘蔗的作物DSM,通过作物DSM提取出甘蔗高度,并结合地面测量值建立甘蔗株高的估测模型[28];用固定翼无人机搭载RGB数码相机估算橄榄树高[29];基于无人机搭载数码相机对获取的大麦株高进行分析,证实了从DSM中计算出的株高具有较高的精度,并且建立了基于大麦株高的生物量估算模型[30-32];利用无人机搭载的高清数码可见光相机对葡萄树的树冠进行三维重建,估算树高[33]。
目前,基于无人机遥感系统计算矮秆作物的研究鲜有报道。本研究以冬小麦为研究对象,使用多旋翼无人机搭载高清可见光数码相机构成的低空农情信息遥感监测系统,对冬小麦从拔节期至成熟期进行了株高监测,以探讨利用数码影像快速估算冬小麦株高的可行性。
1 材料与方法
1.1 试验区概况
试验区位于陕西省杨凌示范区西北农林科技大学中国旱区节水农业研究院冬小麦试验田(34°17′50.94″N,108°4′4.17″E)。杨凌地处关中平原中部,属于暖温带半干旱或半湿润气候,年平均气温11~13 ℃,年降水量500~700 mm。试验区共设有48个样本单元小区(其中1个小区为对照区,无作物),每个小区面积为16 m2(4 m×4 m),小区间纵向过道宽2 m,横向过道宽1 m,试验小区内共种植3个小麦品种,分别为丰矮18、西农389及晋麦47。其中,有12个小区种植丰矮18,19个小区种植西农389,16个小区种植晋麦47。小区随机排列。试验区具体分布见图1。
1.2 地面数据观测
在每个样本单元的小区4个直角处以及中心处选取5株冬小麦,在抽穗期前,使用伸缩尺测量观测点四周若干株小麦顶端叶尖的高度。在进入抽穗期后,测量观测点四周若干株小麦穗顶的高度,取平均值作为该小区的平均株高。具体采集小麦株高方式见图2。
1.3 无人机与遥感数据获取
试验所用的四旋翼电动无人机(精灵PHANTOM 4,大疆公司生产)质量(含电池及桨)约1 380 g,轴距350 mm,续航约28 min。相机的影像传感器是1/2.3英寸CMOS,有效像素为1 240万。数据采集选择无风晴朗的天气,采集时间在北京时间10:00-14:00,飞行高度30 m,图像纵向重叠度85%,旁向重叠度80%,获得的影像空间分辨率为0.014 m。数码相机设置为快门优先,快门时间1/1 600,ISO设定200,白平衡选择晴天模式。在冬小麦的物候期内,总共在试验区域内采集6次数据,采集时间分别为2017年12月6日、2018年4月4日、4月18日、4月29日、5月16日和5月29日。数据采集时,无人机按照设定好的航线和参数自动巡航并获取图像。每张高清数码图像包含拍摄时刻的经度、纬度、高度、偏航角、俯仰角及旋转角等空间位置和姿态信息。受机载GPS定位误差的影响,飞行时航线可能会发生轻微偏移,从而增加飞行所需的航带数,因此每次采集的图像数量会有所不同。各次图像采集数量和对应的小麦物候期见表1。借助Pix4Dmapper软件进行无人机高清数码图像的拼接处理,基于POS数据和对应的无人机高清数码影像进行影像拍摄时刻空间姿态的还原,并生成飞行区域内的稀疏点云;基于稀疏点云建立空间格网,导入GCP对应的三维空间坐标信息添加在空间格网中,对影像进一步优化,生成具有精确空间信息的稀疏点云;基于具有空间信息的稀疏点云进行飞行区域内的密集点云构建,生成飞行区域的3D多边形格网,即飞行区域内的表面几何结构,构建其空间纹理信息。最终生成试验区作物的数字表面模型(DSM)。步骤具体如图3 所示。

图1 试验区分布示意图

图2 小麦株高测量

物候期 Growing stage时间 Date影像数 Number of image拔节期 Jointing stage4月4日 April 440抽穗期 Heading stage4月18日April 1841灌浆期 Filling stage4月29日April 2940灌浆期 Filling stage5月16日 May 1642成熟期 Maturity5月29日 May 2940
12月6日拍摄的数据为地面裸土数据,用于建立试验区域的DSM,在表中未列出。
Data on December 6 was bare soil data, and it was used for building the terrain of the experimental area,and was not listed in the table.
1.4 地面控制点设置
为保证图像拼接精度,在航拍时需设置地面控制点(ground control point, GCP)。由于试验区域地势较平坦,没有太大的高低起伏变化。故本次试验设置4个地面控制点,由0.3 m×0.3 m的黑白格木板组成。试验采用RTK(real-time kinematic,实时动态)载波相位差分技术获取地面控制点坐标及高程,试验仪器为科力达公司生产的X5plus。具体布设见图1。
1.5 数据处理
1.5.1 作物表面模型建立
通过无人机航拍获得的RGB照片建立作物数字表面模型DSM,主要有以下步骤(图3):(1)无人机航拍获取高清数码图像;(2)全面初始化处理;(3)点云和纹理生成;(4)输出DSM。步骤 (2)~(4)主要在Pix4D3.1中完成。

图3 基于DSM提取冬小麦株高的主要步骤示意图
在建立DSM的过程中,正射校正后的DSM在控制点处的高程与实测高程偏差较大,则需要调整相机模型并重新定位控制点在图像上的位置,使软件系统重新计算的控制点位置能够与实际位置一一对应后再进行建模。
1.5.2 小麦株高计算
图4为基于无人机可见光影像提取小麦株高的原理图。其中,在冬小麦播种后至出苗前,获取试验区域的高清无人机数码影像,结合GCP,建立试验区域的DSM,即DSM0。将各个生育时期小麦的DSM减去试验区DSM0后得到作物高度模型(crop height model,CHM),并根据小区范围绘制矩形感兴趣区域(area of interest,AOI)。绘制AOI时,每条边与小区边缘预留1 m,以排除边界的干扰。最后通过CHM分区统计出每个小区的小麦平均株高。
1.6 精度分析
对从CHM中提取的冬小麦平均株高与地面观测值进行线性回归分析,并采用决定系数R2与均方根误差RMSE来评估模型的精度。R2越大,模型拟合性越好;RMSE越小,模型的估测精度越高。
2 结果与分析
2.1 基于CHM计算株高与地面测量结果
由图5可知,从拔节期至灌浆期,冬小麦株高呈线性快速增长趋势,进入灌浆期后,株高变化趋化较小,且在物候期末期冬小麦株高有所降低。5月16日与5月29日的冬小麦株高总体低于4月29日,这主要因为冬小麦在进入灌浆期后,小麦籽粒逐渐成熟饱满,麦穗质量增加,变重的麦穗在垂直于地面的方向上发生一定程度的弯曲,在物候期末期造成其株高变矮。
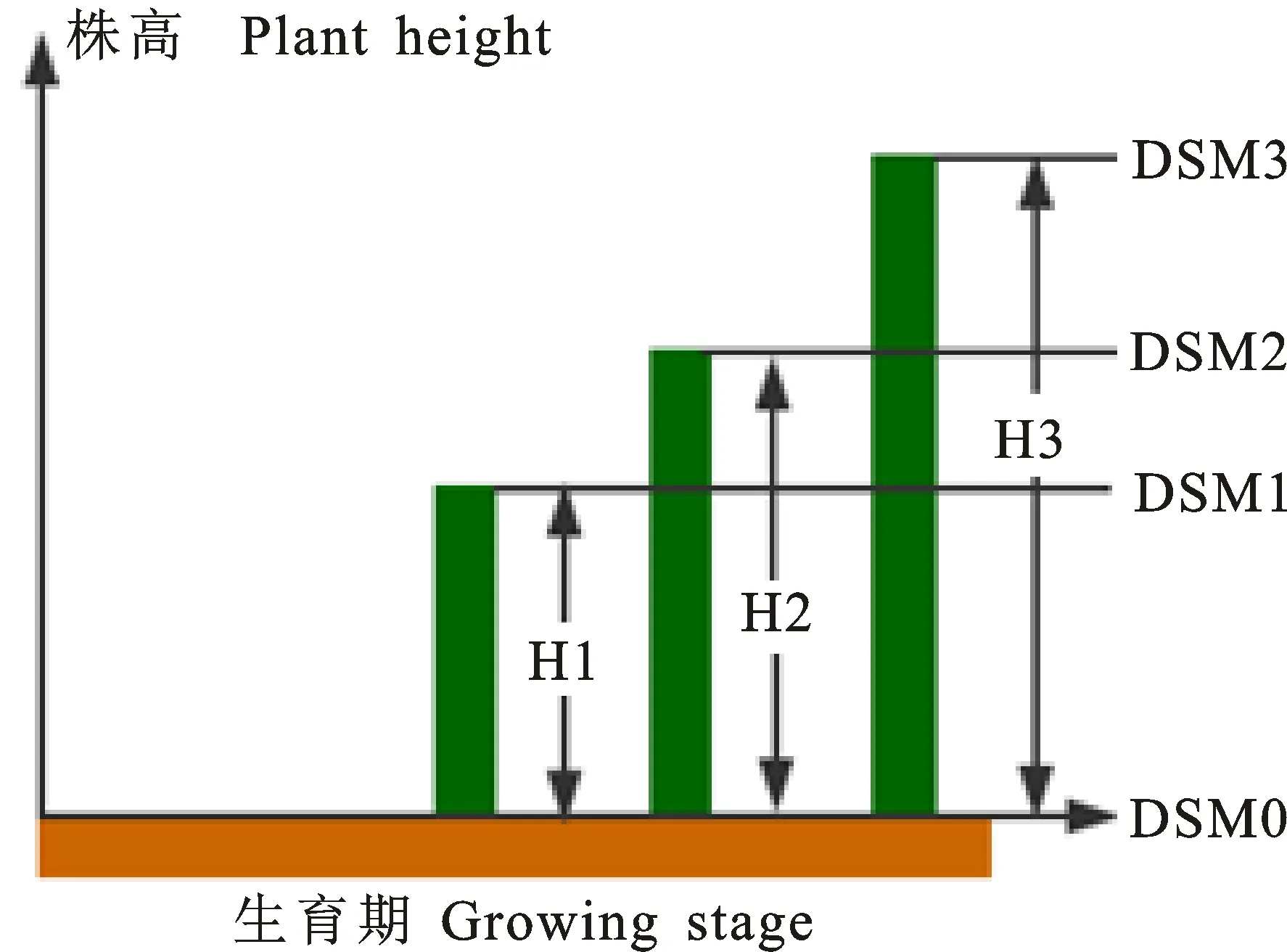
图4 小麦株高计算原理
2.2 基于CHM提取冬小麦株高的精度
对小麦不同生育时期的株高提取值与地面实测值进行线性拟合,结果(图6)表明,在拔节期至灌浆期,三个冬小麦品种的提取效果较好,决定系数R2均高于0.80,RMSE均小于5 cm,其中西农389的提取效果最好,而晋麦47的提取效果相对较差;在灌浆期至成熟期,三个冬小麦品种的提取效果较差,决定系数R2均低于0.80,其中丰矮18和西农389的R2分别为0.49和0.47,晋麦47的提取效果相对较好,R2为0.75。出现这种情况主要与各小麦品种的冠层覆盖度[25]有关。在拔节期至灌浆期,冬小麦植株变高,叶片面积增加,冠层覆盖度增加,因此在CHM中株高的提取效果较好;而在灌浆期至成熟期,冬小麦叶片逐渐卷曲枯萎,造成覆盖度有所降低,导致株高的提取效果变差。
为了检验CHM从拔节期至成熟期对冬小麦株高的整体监测能力,经对冬小麦株高的所有提取值与地面实测值进行线性回归分析,决定系数R2为0.82,RMSE为4.31 cm(图7),说明提取值与实际值较为接近,精度较高,表明基于无人机影像数据建立冬小麦的CHM来获取一定区域内的冬小麦平均株高的方法是可行的。
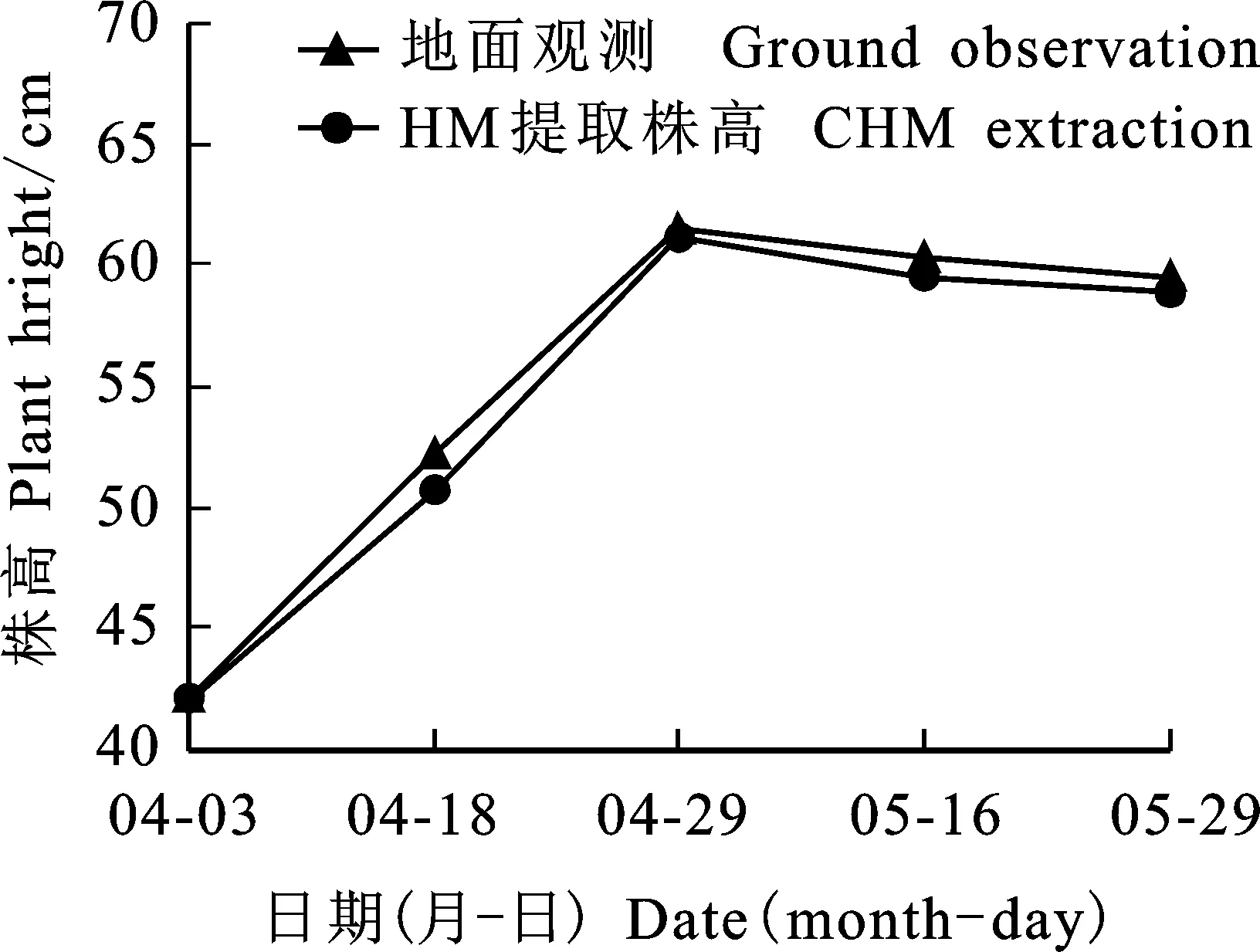
图5 由CHM提取的冬小麦株高
3 讨 论
通过遥感快速估测作物的株高对于现代农业的精细化管理意义重大,但现有的此方面研究多集中于植株较高的作物[14-18],对植株较矮作物的株高快速提取较少。本研究利用无人机搭载高清数码相机构成的低空遥感平台,可高效、便捷、及时地获取冬小麦各生育时期的植株高度,计算结果与前人研究基本相同[31-32],可为冬小麦的田间管理和产量预测提供参考。同时,本研究进一步分析表明,在拔节期至灌浆期,利用无人机搭载的遥感平台对小麦株高的监测能力较高,而在灌浆后期至成熟期则较差,而且检测效果在品种间也存在差异。通过对CHM中提取株高与地面实测值的误差分析发现,整个试验期间冬小麦的平均株高误差分布在-10~9 cm范围,由CHM提取出的株高与地面真实值的相对误差分布在 17.64%~19.60%范围;提取株高的误差平均值为0.19 cm,标准差为3.4 cm。5次试验地面观测的冬小麦样本单元的平均株高高于由CHM提取得到的平均株高。该现象产生的主要原因是由于从CHM中提取出的平均株高是整个样本区域的像素单元的高程(植株顶部叶尖或穗尖高度)平均值,而地面观测到的株高是样本单元内观测点周围若干株冬小麦株高的平均值,二者在样本选择上存在差异。另一个误差来源是在样本单元内,较矮的冬小麦植株被较高的植株叶片覆盖,所以在CHM中,大部分像素单元只包含了较高冬小麦植株的高度信息,没有较矮的植株高度信息,而有的像素包含了杂草、地面等物体的高程,因此在对每个样本单元的冬小麦进行分区统计计算平均株高时,造成了一定程度的干扰和误差。

图6 基于CHM提取的冬小麦株高与实测株高的对应关系

图7 由CHM提取的株高与实测株高关系
总之,由于算法和图像分辨率等问题,基于无人机遥感的冬小麦高度模型计算出的株高总体上低于地面观测的小麦样本单元的总体平均株高。因此,未来需要进一步提高机栽相机分辨率和改进动态结构算法,以提高小麦株高的估算精度。另外,建立CHM及提取冬小麦株高时,其步骤较为繁杂,可以基于模式识别及机器学习等尝试开发智能算法对数据进行处理,为未来的农业自动化精准管理提供参考。
