基于卡尔曼滤波的超宽带时变信道估计*
2019-07-20高善坤陈艳杰张士杰
高善坤,陈艳杰,曹 威,张士杰
(1.商丘工学院信息与电子工程学院,河南 商丘 476000;2.解放军91292部队,河北 保定 074000)
0 引言
超宽带(UWB)技术具有低功耗、低成本、高速率、高多径分辨率等特点,而正交频分复用(OFDM)技术拥有容量大、高速率数据传输和抗多径衰落的优势。两者相结合的UWB-OFDM技术兼具两者的优点,表现出良好的性能,使其成为目前无线数字通信的热点技术之一[1-5]。在超宽带无线通信系统中,信号受到多径衰落的影响,信道表现为频率选择性;信号受到时间衰落的影响,信道表现为时间选择性。收发信机或者散射物的移动,使信道产生多普勒频移效应。因此,分析时变衰落对系统的影响,选择合适的信道跟踪技术是超宽带系统设计的一个重要环节。
目前,对于OFDM系统中的时变信道估计技术的研究已有大量的成果,而对UWB-OFDM系统中的时变信道跟踪理论也有相应的结论。文献[6-7]利用S-V室内信道模型,分析了时不变信道环境下UWB-OFDM的系统性能;文献[8]针对超宽带信道的时变衰落特征,分别给出了收发信机和散射体移动的数学模型,但未给出具体的实现方法;文献[9]分析了UWB-OFDM系统的性能,在时变信道模型上,对散射体的移动进行了仿真,实验论证了在室内环境下散射体的移动对系统的性能影响基本可以忽略。文献[10]在MIMO-OFDM系统中,对信道采用AR过程进行建模,在低维Kalman滤波算法的基础上,给出了一种利用MMSE合并器对其进行修正的方法,结果表明此算法有效提高了估计性能。文献[11-13]系统地阐述了Kalman滤波原理,介绍Kalman滤波方程的改进方法。上述方案并未涉及UWB-OFDM系统中关于收发信机移动产生信道时变衰落问题,UWB-OFDM时变信道的建模及其信道估计的相关研究比较少。
针对kalman滤波发散问题,本文提出一种新的抑制方法,首先根据超宽带信道时变选择性衰落特点,把信道的冲激响应描述为一阶自回归(AR)模型并采用基于导频的Kalman滤波算法,利用LS算法得到时变信道状态转移系数和Kalman滤波初始值。由于受到噪声的影响,由此得到的转移系数误差较大,从而导致滤波发散。最后对转移系数做进一步处理,使其在一定的门限范围内,这样可以有效抑制滤波发散。仿真结果证明了此方法可以有效提高时变信道的估计性能。
1 OFDM-UWB系统描述
1.1 系统模型
典型的OFDM-UWB系统模型如图1所示[14]。
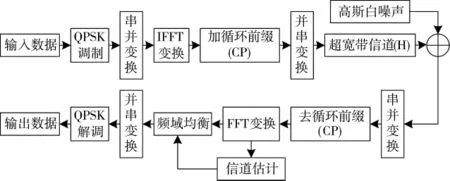
图1 OFDM-UWB系统原理框图
发送端产生的数据经过QPSK调制后,再将串联数据转换为并联数据,最后通过快速傅里叶逆变换(IFFT),此时信号由频率域转换到时间域。若频域信号和时域信号分别记为 X(i,k)和 x(i,n),则第i个符号周期的OFDM-UWB信号为:

其中,0≤n≤N,0≤i≤Nofdm,N 表示子载波数量,Nofdm表示OFDM符号数量。
为了消除子载波间的相互干扰,需对变换后的数据添加循环前缀(CP),然后再将带有CP的数据经衰落信道发送出去,接收端将接收到的信号去CP处理后得到:

其中,L为信道路径数,h(i,n)为时域信道冲击响应,w(i,n)为复高斯噪声信号,其均值为 0,方差为 σw2。通过快速傅里叶变换(FFT),可将接收到的时域信号转换为频域接收信号:

1.2 信道模型建立
超宽带信道模型采用的是基于簇方式的模型,所含参数比较多,仿真实现比较繁琐[15]。自回归模型(AR)以其参数简单易仿真实现的特点得到广泛应用。对于收发信机的移动,可以建模为一个宽平稳不相关散射过程,这样,信道冲激响应就可以描述为P阶自回归模型(AR),则信道变化过程为:

其中,α(k)为信道状态转移系数,v(i)为噪声部分,它服从复高斯分布,其均值为零,本文中的信道模型为一阶AR模型,根据Yule-Walker方程得到:

其中,J0表示一阶Bessel函数,fd是多普勒频移,Ts是信息符号周期,σv2为噪声方差。
2 UWB-OFDM系统信道估计方法
2.1 标准Kalaman滤波算法
Kalman滤波是一种实时递推算法,其处理对象为随机信号,它所利用的统计特性来自系统噪声与观测噪声。滤波器输入是系统的观测量,滤波器输出是所要估计的值,且输入输出间的联系靠的是观测更新与时间更新算法,所有需要处理的信号均由观测方程与系统方程来估计出。Kalman滤波是建立在最小均方误差意义下的最优估计方法,下面给出卡尔曼信道估计递推算法方程[16]:
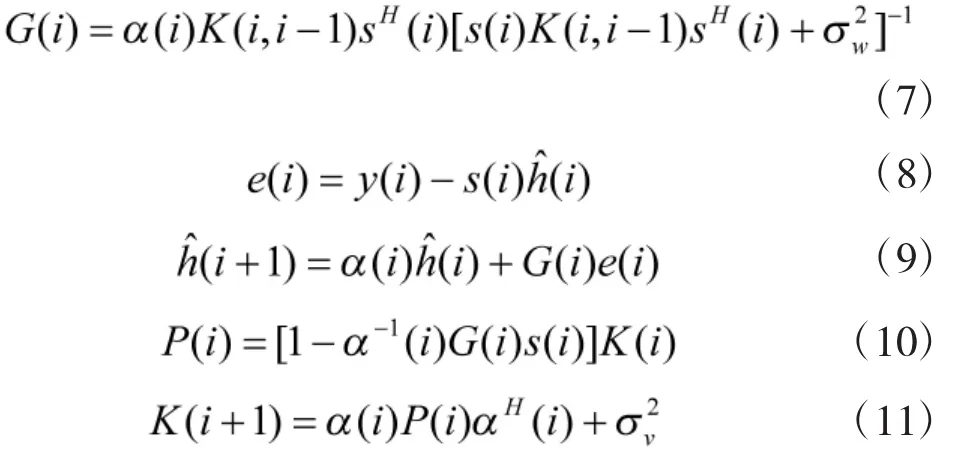
式中,G(i)表示 kalman 增益,(si)表示估计出来的发送信息,表示一步预测之后的修正值,e(i)表示估计误差大小,P(i)表示信道修正之后的协方差。Kalman滤波算法要先知其观测量y(i)、转移系数α(i)、初始量、测量矩阵 s(i),以及观测噪声与过程噪声。在这些参数中,已知的只有观测量y(i),所以要提前估计其他的参数。本文采用的是基于梳状导频的信道估计算法,基于导频的信道估计能够得到所需的初始值和主要参数信息。主要过程如下:
2)估计状态转移系数α(i):根据每个子载波间彼此互不相关,可利用导频信息实现时变跟踪。

2.2 Kalman抑制滤波发散算法
从理论上讲,Kalman滤波是一种线性无偏估计。但从实际角度出发,该算法往往是有偏的。并且在不同的应用环境中,这种偏离的程度有时候会比较严重,即估计误差的方差远大于其理论值。该情况就是所谓的滤波发散。导致滤波发散的因素各种各样,其中最为典型的是建立的数学模型不够精确,使其与实际过程有一定的差别。和其他通信系统类似,在超宽带通信系统中利用卡尔曼滤波算法进行信道估计时,需要估计的量包括转移系数、初始量、测量矩阵及观测噪声方差与过程噪声方差。由于系统的时变性,这些需要估计的量不能准确地估计出来,这是造成发散的主要原因,而滤波发散会使滤波效果大幅下降[11]。
本文主要考虑状态转移系数对系统估计的影响。由于系统噪声的存在,利用导频跟踪时变信道方法得到的状态转移系数会有一定的误差,当噪声较大时,该方法的估计误差大,此时滤波发散情况明显,导致滤波效果较差。为了保证滤波效果,需采取有效的措施抑制滤波发散。下面从如何修正状态转移系数的角度出发,提出一种新的抑制滤波发散的方法。该方法通过对转移系数设置门限,将门限范围之外的部分进行修正,修正后的转移系数可以很好地解决由状态转移系数估计偏差引起的滤波发散问题。新算法的具体流程图如图2所示。
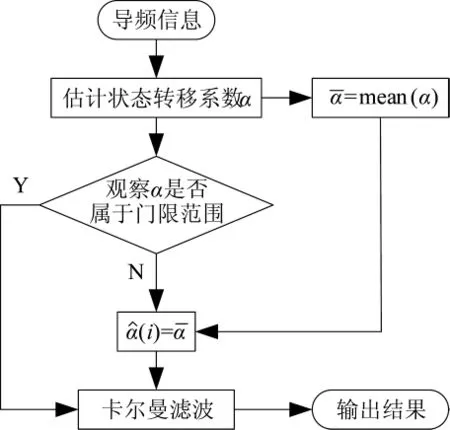
图2 新算法流程图
首先将导频估计出的初始转移系数进行门限滤波,设置阈值门限值为:


统计均值与转移系数的理论值更加接近,当转移系数不在门限范围内时,可以用统计均值代替这部分值,以达到抑制滤波发散的目的。设均衡系数β为:

结合均衡系数,可将状态转移系数重新设置为:

综上所述,提出方法在Kalman滤波方法的基础上,通过对超出门限范围的转移系数α(i)进行迫近α的处理,可以降低滤波发散带来的不良影响,提高系统的估计性能。
3 仿真与分析
在以上分析的基础上,通信系统采用超宽带OFDM系统模型,信道采用时变信道模型。MATLAB仿真时,其他参数设置如表1所示。其中,门限阈值的设定范围决定了去噪效果,将门限设定为0.9~1.1可以有效地去除较大的不正常的干扰,门限范围越大,干扰越大,09~1.1是比较符合实际的一个门限,超过这个门限是不符合逻辑的干扰,因此,选择门限阈值为0.9~1.1。

表1 仿真参数
图3为收发机的速度达到30 km/h时,LS估计算法、FFT插值算法、传统Kalman滤波算法、提出算法以及理想Kalman滤波算法的均方误差性能比较。理想Kalman滤波算法与一般Kalman滤波算法的主要区别在于:前者在进行运算时信道状态转移系数是已知的理想值,而后者在进行运算时信道状态转移系数是未知的需要估计的值。从仿真图中可以看出,信道状态转移系数的估计受噪声影响,导致Kalman滤波估计性能很不理想,滤波发散严重。采用抑制发散的Kalman滤波算法,信道估计性能比传统的Kalman滤波提高很多,与理想Kalman滤波的性能相当。
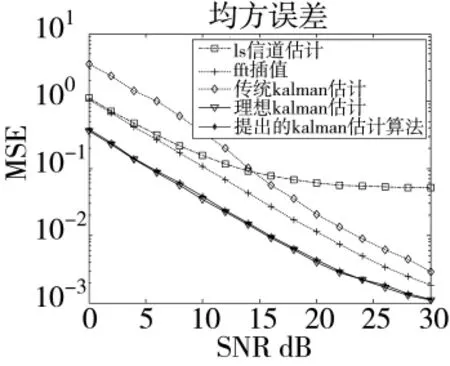
图3 v=30 km/h信道MSE曲线
图4 和图5为收发机的速度分别达到60 km/h和120 km/h时,上述各种估计算法的均方误差性能对比。由仿真图可以看出,无论收发机移动速度的快慢,提出的Kalman改进算法的估计性能不仅优于传统Kalman算法,还优于其他估计算法。而随着收发机的速度增大,信道的时变性也随着增强,提出算法的优越性就会更加突显。通过对比以上3种情况,可以得知,当收发机的移动速度相对较慢时,也就意味着信道为慢时变信道,此时提出的Kalman滤波估计算法的估计性能与理想Kalman滤波估计算法的估计性能最为接近。
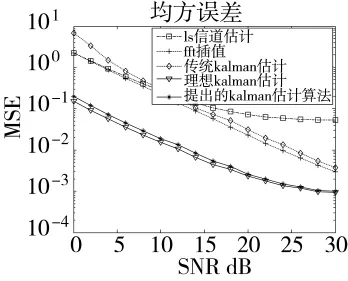
图4 v=60 km/h信道MSE曲线

图5 v=120 km/h信道MSE曲线
4 结论
本文提出了一种改进的Kalman滤波信道估计算法,在超宽带通信系统的时变信道估计中能够发挥很好的作用。该方法着重从如何抑制滤波发散的角度出发,而滤波发散的严重度与状态转移系数估计的准确度息息相关,故对该系数进行了修正,修正后的状态转移系数能够很好地跟踪时变信道的变化,从而提高了信道估计性能。通过Monte Carlo仿真,验证了改进方法在估计性能上优于传统Kalman滤波的性能,且优于其他算法的估计性能,尤其在信道时变性变化较快时,该改进算法的估计效果较好,是一种比较实用的信道估计方案。在超宽带通信系统中,当散射体或收发信机处于移动状态时,该时变信道估计方法可以有效跟踪信道的变化情况,得到精度较高的信道估计值。当接收端利用较准确的信道信息估计值进行信号检测恢复发射端发送的数据时,可以确保接收信号的准确性。