轻型汽油车国六后处理OBD系统研发现状*
2019-07-16帅石金刘洋张云龙
帅石金 刘洋 张云龙
(清华大学 汽车安全与节能国家重点实验室,北京 100084)
主题词:汽油车 三效催化剂 颗粒捕集器 车载在线诊断
汽车是当今社会需求量最高的交通工具,然而伴随着汽车产业的蓬勃发展,造成的环境问题已经愈发不容小觑。对于汽油机来说,三效催化剂的研制成功使其排放污染问题已经基本得到解决;柴油机由于其排放污染物绝对量更多,成分也更复杂,需要研究多种后处理技术的组合应用。但随着汽油车尾气排放法规的进一步加严,油耗和二氧化碳的限值进一步降低,以及汽油发动机技术的变化,轻型汽油车尾气污染物的种类和净化要求也变得更为复杂,如CH4被列为了新的污染物,后处理部件耐久要求提高,颗粒物的排放控制由质量拓展到数量等。车载在线诊断(On-Board Diagnostics,OBD)系统正是在这种背景下催生出的技术产物,其研发对于控制排放甚至促进车联网发展都具有极其重大的意义。
本文对OBD系统的工作原理和发展历程进行了阐述,介绍了轻型汽油车集成后处理OBD系统的核心技术,分析了国六阶段的OBD技术重点与难点,并对OBD系统研发工作进行了展望。
1 OBD系统概述
1.1 OBD工作原理
OBD被定义为汽车或发动机的一个在线系统,它拥有以下能力:
(1)检测影响发动机排放性能的故障;
(2)通过警告系统指示这些故障的存在;
(3)通过电脑中存储的信息或离线访问信息来诊断故障发生的可能区域。
OBD系统作为发动机管理系统(Engine Management System,EMS)的重要组成部分,存储着来自于发动机的各种冻结帧信息,包括发动机的转速、扭矩、排气温度、排气质量流量等。OBD系统按照一定的监测循环实时地监测与排放相关的各个传感器和后处理部件的工作情况,当发现排放超过限值后,就对比各种信息对发动机系统中发生的可能影响排放的故障做出诊断,并且保存一个故障代码。与此同时,故障指示灯(Malfunction Indicator Lamp,MIL)将会激活,提醒驾驶员汽车已经发生排放故障,需要暂停驾驶[1]。在停车后,相关维修人员通过故障诊断仪器与OBD的接口相连接读取故障代码,并与统一的信息手册相对照,就能够明确知晓故障的原因,并进行维修。
导致排放超标的原因非常多,可能来自于传感器等电子元器件的电路故障,也可能由三效催化转化器(Three-Way Catalytic Converter,TWC)、汽油机颗粒捕集器(Gasoline Particulate Filter,GPF)等后处理部件的老化或损坏导致。OBD系统需要准确地判断出排放恶化的源头,这就需要建立一套完整、合理的监测和诊断算法;同时,OBD系统也需要对于故障进行迅速响应,甚至能够在驾驶员长时间未采取行动的情况下,主动地限值汽车发动机的扭矩以达到控制排放和警告的效果,这就需要建立实时性好、鲁棒性强的决策算法。可见,OBD系统的开发和设计与发动机本身的排放特性息息相关,它的各种信息又直接从发动机电子控制单元(Electronic Control Unit,ECU)中读取,这样的特点导致OBD系统本身拥有非常高的复杂度,在算法编写完成后,还需要进行大量的试验,对其中的关键参数进行标定,这个周期往往很长,工作量很大。
1.2 OBD发展历程
OBD的概念最早由通用汽车公司提出,早期的OBD系统仅具备基本的故障诊断和故障响应的功能,对于排放控制的能力有限。
美国加利福尼亚州由于汽车排放而造成大气恶化,在1985年,加州空气资源委员会(California Air Resources Board,CARB)采用汽车工程师协会(Society of Automotive Engineers,SAE)标准,规定自1988年起加州所售汽车具备基本OBD功能。1991年,美国环保局要求所有的新车必须满足OBD相关技术要求,即为OBD I。
OBD II在OBD I的基础上发展而来,由SAE指定相关诊断接口和通讯方法标准,技术要求更加完整和标准化。欧共体规定自2000年开始,所有成员国境内所售汽车需满足相关技术要求,即为EOBD,与OBD II的性质和要求较为相似。
从2004年开始,OBD发展进入第三阶段,即为OBD III,也是欧6法规中采用的OBD阶段。中国当前施行的OBD法规需要满足《轻型汽车污染物排放限值及测量方法(中国第六阶段)》中的相关要求,其结合了欧6法规和美国LEV III排放法规的特点。国六OBD相比于国五的变化主要体现在排放污染物限值和监测项两方面。排放限值要求中,国五和国六的CO限值不变,均为1 900 mg/km;国五对于NMHC和NOx的限值要求分别为250 mg/km和300 mg/km,国六则将两者合并,设置NMHC和NOx的总和限值为260 mg/km;国五对于PM(Particulate Matter,PM)的限值要求为50 mg/km,国六降低为12 mg/km。国六OBD监测项要求中,56%的监测项相比于国5进行了加严,主要体现在内容增加和在用监测频率(In-Use Performance Ratio,IUPR)提高上,如TWC监测、失火监测、综合零部件监测等;44%为新增监测项,包括了GPF监测、蒸发系统泄漏监测、冷启动减排策略监测等。排放污染物限值的大幅降低表明国六OBD系统需要更快速和精确地诊断排放部件的相应故障,监测项的增加和加严表明国六OBD系统应具备更完善的诊断功能和更高的使用频率,这一切都为OBD工作提出了新的机遇和挑战。
2 TWC诊断技术研究
2.1 TWC诊断原理
TWC是汽油发动机后处理系统的核心部件,主要通过在载体上涂敷催化剂促使发动机尾气中CO、HC和NOx三种成分参与氧化还原反应,转化为CO2、H2O和N2,起到降低排放的作用,TWC的转化效率受到排气温度和空燃比两方面的影响。TWC具有一个起燃温度,一般为300℃,决定了它的工作时刻,故在低温冷启动阶段,发动机排放污染物含量较高;而当排气温度超过400℃时,TWC的转化效率较高;排气温度超过800℃时,TWC可能面临失效。TWC对各种污染物的转化效率在排气达到理论空燃比附近时最高,故需要在TWC前安装氧传感器进行空燃比闭环控制。
TWC内部最重要的化学过程是氧的存储和释放,用以下化学反应描述[2]:

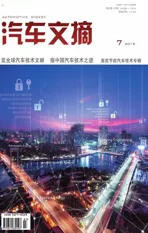
对于新鲜的TWC,其中的铈氧化物具有良好的储氧能力,当发动机的工作状态偏离理论空燃比时,如偏稀或偏浓,TWC将对这种变化作出响应,进行相应的储氧和释氧过程,从而使得TWC后端的排气始终保持在理论空燃比左右,如图1所示,此时TWC的转化效率最高;随着TWC由于高温、催化剂中毒等原因逐渐老化,其储氧能力不断下降,即最大储氧量不断减少,此时TWC后的排气不再维持在理论空燃比,而是产生一定程度的波动,如图2所示,此时TWC转化效率下降;当TWC老化达到临界状态时,催化剂基本丧失储氧能力,TWC前后氧传感器的电压信号将趋于一致,如图3所示。

图1 新鲜TWC前后氧传感器信号对比

图2 老化的TWC前后氧传感器信号对比
2.2 基于氧传感器信号分析的诊断算法
安装在TWC前后的氧传感器能够直观的表现TWC的老化程度,两者配合使用可以建立基于氧传感器信号分析的诊断算法。美国福特公司[3]早在九十年代就对相关方法进行了研究,他们设计了一套“氧传感器指标”参数,定义为TWC后氧传感器和前氧传感器波形(空燃比或电压)振幅的比值,并建立了该参数与HC转化率之间的物理模型。然而试验表明,该模型所描述的对应关系只在较小的HC转化范围(80%~90%)内成立,模型的表现受到发动机空燃比反馈控制系统标定、TWC体积、TWC涂层配方、燃料含硫量等多种因素的影响,实际使用时的诊断精度受到了很大的制约。在该研究之后,Kurihara等人[4]提出的基于相关函数理论的诊断方法,Kumar等人[5]提出的基于功率谱密度理论的诊断方法等均对TWC氧传感器信号进行了更深入的解析,一定程度上提高了TWC诊断精度。
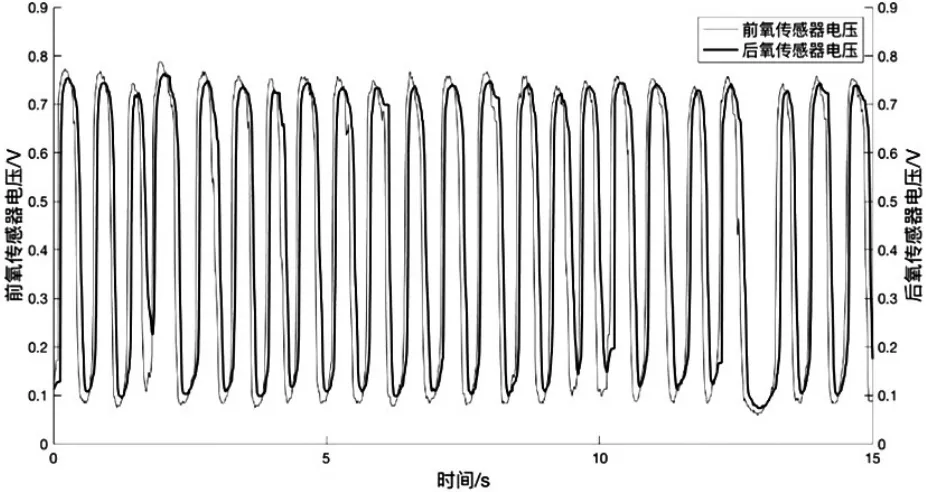
图3 临界TWC前后氧传感器信号对比
经过十几年的发展,基于氧传感器信号分析的诊断算法已经得到了很大改善并实现产业化,最典型的算法是以Bosch公司为代表的后氧传感器信号振幅判断算法和以Delphi公司为代表的延时判断算法[6],又称“浓稀法”。振幅判断法的模型结构如图4所示。该方法通过大量试验建立TWC老化的经验模型,在实车运行中用实际采集到的后氧传感器信号与模型预测的后氧信号做对比,结合阈值判断TWC的老化程度。这种诊断策略的主要问题是在各稳态工况下标定经验模型相关参数的工作量很大,模型可靠性验证周期较长。

图4 TWC振幅判断法模型结构[6]
延时判断法的诊断过程如图5所示,该方法在诊断区间内主动控制发动机空燃比,使其先高于理论空燃比并持续一段时间,使TWC完全储氧;随后调节到低于理论空燃比,使TWC释放氧。这个过程中,后氧传感器信号表现为电压由最小值变化到最大值,并且存在时间差。TWC的老化程度越高,这个时间差将越短,通过标定临界催化器的时间差即可确定诊断阈值。延时诊断法的主要缺点在于需要改变发动机原有的控制策略,使得TWC前空燃比在诊断过程中偏离转化效率最高的区间,导致排放恶化。

图5 TWC延时判断法诊断过程[6]
为了克服上述方法带来的问题,适应最新OBD法规要求,更为先进的基于氧传感器信号分析的TWC诊断研究仍在不断进行中。Sawut等人[7]提出了一种用以诊断TWC老化的指标参数,该诊断指标定义为前后氧传感器信号标准差的差值比率。实验对象为计划在欧洲推广的轻型天然气汽车,其中TWC采用“前线性氧传感器+后阶跃氧传感器”的配置。经过试验证明,该指标随着TWC老化程度的加深由1逐渐变化到0,通过设置阈值可以区分新鲜TWC与临界TWC。该诊断方法在稳态工况和实际驾驶的瞬态工况下均表现良好,并且不会对排放和驾驶产生副作用。Syu等人[8]基于前后均安装阶跃型氧传感器的TWC配置提出了一种“平均老化指标”,该指标定义为前后氧传感器电压信号平均振幅的差值,并通过计算标准差设定TWC临界老化阈值。在TWC上加装流通面积可调的旁通管,改变污染物转化率以模拟不同的TWC老化程度。台架试验表明,在怠速工况下,基于“平均老化指标”的诊断算法相比于传统的振幅比值法降低了误诊的可能性。福特公司的Kumar等人[9]基于支持向量机(Support Vector Machine,SVM)开发了一种TWC诊断算法,该算法以燃料质量流量(通过TWC前后空燃比计算)和TWC载体温度为输入,新鲜或临界TWC的诊断结果为输出。模型主要训练过程在线下进行,得到一套最优参数后进行线上应用,占用的ECU计算资源较少。经过试验验证,诊断算法在整节TWC系统中能够取得100%的分类准确率,且最大程度的减小了标定工作量。
2.3 基于储氧量模型的诊断算法
TWC储氧量是影响其转化效率的最本质因素,然而目前不存在能对TWC储氧量进行直接测量的传感器,故建立精确的TWC储氧量模型成为了TWC诊断在迈入21世纪后的研究重点。James C.Peyton Jones等人[10-12]在该领域进行了一系列具有代表性的深入研究,定义氧存储率θ˙的计算公式如下:

式中:K为排气修正因子,主要受到发动机进气量的影响;Δλpre为TWC前的相对空燃比减去1后的值;N(θ)是氧存储水平θ的函数,采用5次多项式作为经验公式,数值上等价于Δλpost,即TWC后的相对空燃比减去1后的值。
式(2)从浓/稀混合气两个输入维度描述了氧存储的动态规律,实现了氧存储水平和TWC后空燃比的预测。针对该模型在浓混合气工况下的不稳定性,引入了氧传感器信号修正,使得模型仿真结果与实际实验数据更加吻合。通过对N()θ函数中的自变量引入比例劣化因子,实现了对TWC老化故障的模拟。通过KS-检验对新鲜TWC和老化TWC的输出分布进行了对比,取得了良好的诊断效果。Watanabe等人[13]对Peyton的模型提出了改进意见,认为模型参数应根据TWC输入的浓稀变化次序进行相应变化。浙江大学的吴锋等人[14]综合了上述经典模型的结构和修改观点,进行了试验研究,在发动机空燃比“浓稀法”控制下对模型的参数进行了标定,改进模型的结构如图6所示。
图6 TWC氧存储模型[14]
模型输入为TWC前空燃比和空速修正因子,输出为TWC后空燃比和氧存储水平。该模型针对TWC前空燃比“浓到稀状态”和“稀到浓状态”设计了两套不同的标定参数。仿真验证表明,在相同输入下,模型的输出和TWC后氧传感器实测信号对应良好,证明其具有较高精度;同时,因为结构简单,该模型也在TWC的OBD诊断上拥有良好的适应性。
近年来,随着计算流体力学(Computational Fluid Dynamics,CFD)软件的成熟和硬件计算能力的提升,TWC储氧量模型的研究由早期的“面向控制”逐渐转变为“面向机理”[15]。美国克莱姆森大学和FCA公司[16]研究了TWC的老化对于其氧存储动态特性的影响。该研究对四个具有不同老化程度的TWC进行试验,将其分为前TWC、中TWC和后TWC三部分来布置空燃比传感器和氧传感器。研究基于化学反应动力学机理建立了简化的TWC氧存储模型,只考虑一种氧化性气体O2和一种还原性气体CO。该模型量化了储氧量计算参数和老化里程之间的关系,模型标定结果表明了两者负相关,并且储氧量参数对驾驶工况的敏感性不高。依据该研究的结果可以建立以储氧量作为单输入的TWC老化诊断模型,极大程度上提高了OBD策略设计的准确性和便利性。
3 GPF诊断技术研究
3.1 GPF诊断原理
目前的GPF大多采用壁流式结构,其工作原理如图7所示[17]。堇青石载体内部有若干平行孔道,相邻孔道之间分别用堵头堵住入口和出口。发动机排气从开口的孔道流入,从相邻孔道流出,排气内部的碳烟颗粒物将会在壁面上形成捕集。当碳烟积累到一定量时,需要设计控制策略进行氧化再生。

图7 GPF工作原理示意图[17]
GPF可能发生的故障按照影响排放和影响发动机性能分为两类,其中影响排放的故障有人为移除载体、封装不当导致载体破损、再生温度过高导致孔道烧熔泄漏等;影响发动机性能的故障有碳烟沉积过多、润滑油灰分造成的过滤体堵塞等[18]。
排气流经GPF时将受到三部分的阻力作用,分别为进出口通道产生的沿程阻力、壁面和覆盖颗粒物产生的流动阻力,以及排气流经孔道时由于截面变化引起的压缩/膨胀阻力,直观上表现为GPF两端具有压力差,且随排气流量的增加而增加。当GPF发生各种故障时,其两端压差将会产生相应的变化,故可以作为诊断的基本依据。GPF是国六要求的新后处理部件,目前相关的研究数量和深度均有限,由于结构和工作原理的相似性,可以类比已经在柴油车上广泛应用的柴油机颗粒捕集器(Diesel Particulate Filter,DPF),进行GPF诊断算法的开发。
3.2 基于压差传感器的诊断算法
基于传统压差-排气流量模型[19]设计的GPF诊断算法的流程如图8所示。对于使用GPF压差估算碳载量的应用,需要标定出不同温度下,压差和排气体积流量的变化关系,最终得到压差-排气体积流量-温度的三维MAP图。但对于GPF诊断来说,无需得到精确的压差数值,使用台架标定出的压差-排气体积流量曲线配合一定的阈值范围即可满足诊断要求。这个阈值范围由故障标准曲线得到,涵盖了温度对于压差的影响。将压差的测量值与故障标准值进行对比,判断其位于哪一种故障的阈值区间,即完成了GPF故障类型的诊断。

图8 基于压差传感器的GPF诊断流程[19]
Van等人[20]在2004对基于压差传感器的诊断算法进行了总结,他们认为该方法具有很多缺陷。首先该算法难以诊断出类似载体烧熔等对过滤体总压差影响较小的故障,故障类型覆盖不全面;其次,过滤体在使用过程中容易产生细小裂缝,这种故障容易随着碳烟积累而自愈,故算法必须进行一段时间的持续监测,导致诊断频率降低;最后,压差标准值的计算会受到压差传感器、温度传感器等的误差影响,最大可达±22%,导致故障和非故障过滤体之间产生诊断重叠区,影响诊断精度。在工程应用中,开发颗粒捕集器诊断算法之前一般会进行控制策略的设计,其中的核心内容就是碳载量理论计算模型的建立,该模型常常在诊断算法中与压差传感器搭配使用[21-23]。他们对基于模型的过滤体泄漏诊断进行了跟进研究,试验结果表明,基于化学反应动力学建立的过滤体模型能够诊断泄漏面积在45%~55%左右的故障,诊断精度相比压差法并未提升。模型法的优势在于诊断工况覆盖的范围更大,提升了诊断频率,但也不可避免的导致了标定工作量的增加[24]。
3.3 基于电阻式PM传感器的诊断算法
为满足欧6法规的要求,很多企业正不断寻求压差传感器的替代方案,其中的主流即采用电阻式PM传感器[25-27]。AVL公司的Hoepfner等人[28]对基于颗粒捕集器效率的OBD诊断进行了研究。该研究采用的PM传感器原件结构如图9所示,其测量原理与颗粒捕集器的工作原理类似,废气中的碳烟颗粒物沉积在堇青石基底上,从而改变了两个测量电极之间的电导率。传感器内部的加热器会被周期性驱动以氧化碳烟,故PM传感器的测量值实际上反映了一段时间内的平均碳烟量。
他们使用MATLAB/Simulink作为开发工具,建立了过滤体效率监测的OBD算法。PM传感器被安装在DPF的下游,DPF基层上的裂纹和漏洞将会增加碳烟泄漏,PM传感器就会监测到更高的碳烟浓度值。DPF的转化效率可以由PM传感器处实际的和最大的可能的碳烟流量比较得出,为了能够精确地得到结果,需要考虑气体的运输时间和排气组分的影响。DPF效率的监测需要在发动机和后处理系统处于合适状态时进行,即在碳烟质量流量模型相对准确的条件下进行。对转化效率进行低通滤波后与标定的转化效率限值进行比较,若小于这个值,有关DPF系统的故障信息将会发送给故障管理系统进行处理。此算法面临的一个重要问题在于诊断的准确度与IUPR之间存在矛盾的关系。IUPR是欧6法规中关于OBD实时性的新要求,规定一个特定故障的监测频率不能低于0.336。因为DPF效率需要在稳定的发动机环境下进行监测,这就限制了其在整个驾驶时间中的有效监测次数。为解决这个问题,就需要在OBD的标定工作中对监测条件和监测频率进行大量的测试,找到合适的标定值,寻求两者之间的平衡。通过发动机台架试验,对该OBD算法的性能进行了优化,在最终的实车测试中,基于FTP75循环工况,得到了良好的结果,验证了所设计OBD算法的准确性和可靠性。

图9 电阻式PM传感器元件[28]
3.4 基于射频传感器的诊断算法
美国橡树岭国家实验室[29-31]在近三年内对新式射频(Radio Frequency,RF)传感器在GPF的OBD策略中的应用进行了一系列研究。该研究针对目前最先进的GPF系统,探究新型的RF传感器用于GPF故障诊断和监测的可行性。RF传感器在GPF系统中的布置如图10所示,传感器将GPF的金属外壳作为谐振腔,不同频率的射频信号反映了过滤体内部的碳烟分布情况。与电阻式PM传感器相比,RF传感器可以直接测量GPF的碳烟和灰分加载量,并具有同时监测GPF上游排气和GPF结构损坏的能力。由于汽油机原始排放的颗粒物相对于柴油机来说较少,RF传感器需要对极少量的碳烟加载进行良好的响应。该研究评估了RF传感器对碳烟加载的常规响应,认为可以符合OBD监测的要求。之后,通过在GPF的下游位置分别移除8×8和16×17单元区域的堵头,模拟出GPF两种不同泄漏程度的故障,加上一个完好的GPF,来研究此时RF传感器对这三种GPF的碳烟加载情况的响应特性。结果表明,RF传感器不仅可以精确地测量碳烟加载,也可以进一步地监测由GPF泄漏而造成的碳烟加载减少量,精度达到了10-2g/L。这无疑为开发GPF系统的OBD策略提供了硬件的基础,该研究的下一步工作就是基于RF传感器的输出特性建立合适的GPF模型,结合该模型的输出开发对应的OBD诊断算法。

图10 RF传感器系统布置[31]
4 OBD研发现状及趋势
4.1 OBD研发现状
OBD的研发从宏观上来看主要有一条主线和一条支线。主线是根据最新的排放法规适配OBD的最新要求和性能。这个过程的难度在不断加大,排放法规的加严导致了污染物限值的不断下降,要实时监测这些数值无疑对发动机后处理系统的传感器精度提出了苛刻的要求,所以开发新型传感器,如PM传感器、NH3传感器等势在必行。其次,现在的汽车后处理系统趋向集成化,在国六阶段,轻型车要求必备TWC+GPF后处理系统,如此高的系统复杂性要求OBD具有非常好的鲁棒性,在各种扰动下能保证监测和诊断结果的准确和稳定。此外,更加复杂的系统必然带来更多的标定参数,一些标定参数需要基于合格劣化部件的试验得出,测试和认证流程冗长而且复杂。所以基于模型来开发OBD系统是目前的主流手段,很大程度上减小了开发成本和标定周期,当然其可靠性是一个值得关注的问题。
支线就是利用OBD系统收集ECU信息的特点,结合车联网的核心思路,开发一些附加功能[32]。例如通过手机APP与OBD系统建立通讯关系,车主用手机时刻了解和关注车辆发动机的运行状态和健康程度;还可以通过OBD系统为ECU的升级提供接口,实现控制系统的软件更新,类似于通过一个U盘来安装软件和操作系统,非常的快捷和便利。
OBD的研发从微观角度来说主要集中在软件开发方面。最底层的软件开发,就是在确定了相关的硬件平台后,编写算法来确认ECU、传感器及发动机的排放是否存在故障,这个过程的难点在于导致排放超标的原因不容易确定,尤其在多个部件故障导致排放恶化的情况下,算法的分辨率要足够高才能诊断出故障的具体成因,这就要求编写者对于发动机后处理系统甚至整个发动机系统都有细致和深刻的了解。高一层面的软件开发就是编写OBD系统管理的流程软件,例如博世开发的诊断管理系统,具备故障监测、故障诊断、故障分类和故障响应的功能,总体来看,就是把OBD单个故障的监测诊断逻辑集成化,以严重性作为分类依据,做出快速合理的响应。这个过程的难点在于协调各个部件之间的监测顺序和监测频率,以及复杂情况下的任务切换和管理。更高一层面的软件开发就是诊断软件的开发,在OBD系统的试验测试初期,一般通过上位机软件来读取OBD系统的各种输出结果,与自带的数据库进行对照,从而实现故障的诊断,这个过程的工作量和难度均不大,可以直接合并到标定软件的开发中。最后一个层面的软件开发就是标定软件的编写,随着法规加严,OBD的标定周期有明显延长的趋势,对于注重研发效率的汽车企业来说,这种情况要尽可能避免。标定软件最重要的组成部分就是完备的数据库,通过大量的数据比对,实现标定量选取的最优解。要具有一定的数据处理能力和模型分析能力,以便于随时对实验结果进行预期处理。好的标定软件无疑能对缩短标定周期起到重要作用。
4.2 OBD研发趋势
OBD的开发工作需要紧跟排放法规的步伐,特别是在环境问题优先级很高的今天,OBD技术的发展无疑是汽车电子控制技术中的重点项目。OBD研发工作主要有以下趋势:
(1)将先进的控制策略和软件开发方法引入OBD系统的开发中,一种典型的轻型汽油车国六后处理OBD系统开发技术路线如图11所示。近年来,基于快速原型的开发模式在汽车控制系统上得到了广泛应用[33-35],核心在于将真实的被测对象和虚拟的控制器相结合,应用自动代码生成技术,将PC环境中建立的模型下载到实时硬件上运行,考察设计的ECU功能模块在嵌入式环境中的实际表现,完成逻辑验证、性能评估以及模型优化等工作。相比于传统的嵌入式开发流程,该方法的主要优势有:符合V型开发流程,开发者可以在软件编写的同时通过纯软件仿真和半实物仿真对逻辑正确性进行验证,在开发的早期发现一些关键性问题和缺陷;软硬件设计可以同时进行,极大程度缩短开发周期,降低开发成本;核心算法由可视化模型构建,可读性强,便于修改和移植;开发者可以将设计重点放在实现功能的算法和测试功能的试验方案上,上位机可以自动完成代码生成,随时移植到集成系统中完成验证工作。

图11 OBD系统开发技术路线
(2)OBD系统的功能将不断地拓展,从发动机ECU的辅助系统升级到独立的整车故障诊断系统。OBD系统提供的信息也将覆盖整车各个零部件,成为整车管理系统的重要组成模块。基于这样的考虑,使用嵌入式实时操作系统(Real Time Operating System,RTOS)进行软件开发就变得很有必要。在微控制器中移植例如μC/OS-III这样的操作系统可以在占用很小内存(几十个千字节)的情况下,实现多任务管理,任务同步,共享资源保护,消息传递等上位机操作系统中常见的服务内容[36]。对于复杂的OBD管理系统,应用RTOS能够在保证良好实时性的基础上,一定程度上降低编程开发难度。只要将OBD系统编制成软件包,就可以随时应用于移植了RTOS系统的任意控制器。
(3)OBD系统的庞大数据流将为智能汽车的发展提供极大的支持。最新的OBD系统为汽车制造厂商提供了实时监控车辆状态的通道;迎合汽车的智能化趋势,OBD系统也将作为智能车载终端[37]发挥潜力,例如提供车内设施远程控制、驾驶行为分析、汽车保养提醒等实用服务。
5 结束语
轻型汽油车OBD是近年兴起的发动机与后处理系统关键技术,其功能正在不断被开发和完善。国内对于OBD的研究起步较晚,需要以排放法规作为纲领性文件,加快步伐,赶上国际OBD研发进度。此外,OBD系统与发动机ECU密切关联,是电控系统重要的组成部分。在OBD系统的研究过程中积累经验和基础,进而逐步实现自主ECU的开发,将是今后国内汽车企业和高校在汽车电子领域的工作重点。