拖轮混合动力系统的优化设计
2019-07-10
(武汉船舶职业技术学院,湖北武汉 430050)
1 前 言
全球气候变化使节能、环保日益成为人们关注的热点。船舶方面由此提出了绿色船舶的概念。随着技术的进步、研究的深入,绿色船舶的解决方案也是多途径、多方位的。如从船体伐型设计的优化、主机的优化、动力装置的优化、船舶电路的优化等等。但综合而言,动力系统的优化实则最为关键。下面,我们以某型应用混和动力的港作轮船的动力系统优化过程为例,进一步从理论和方法上为绿色船舶概念,提供可行性依据及解决方案。
“绿色船舶”的关键技术是船舶动力系统的设计与改进,本文以此为切入点,打造“绿色拖轮”,使用蓄电池为拖轮提供辅助能量,研究拖轮动力系统匹配性能的优化。尽最大的可能降低油耗和排放,实现零污染的目标,同时也大大改进船舶的控制机能,确保安全运营。
港内作业的拖轮是辅助大型船舶靠离港口、护航、救助、消防、移泊等功能的多用途船舶。拖轮的机舱配备有大功率的中速或高速柴油机,甲板装有拖曳设备,各机械设备安装较为紧凑,拖轮机舱相对狭小。拖轮在大部分时间内处于待命和机动航行工况状态,顶推拖拽作业所占的时间比例较小,主推进柴油机常处于怠速状态,从而导致多数工况下,船舶主推进柴油机功率过分冗余。
相比于其他船舶的工作循环,拖轮的工作循环相对稳定且有规律可循,如果采用混合动力推进方式,即采用柴油机、电机(有时工作在发电机状态,有时工作在电动机状态)和蓄电池储能装置的驱动方式,可以减少柴油机的装机容量。通过电机与柴油机的适当配合,几乎在所有工况点下都可以实现效率最优,从而降低柴油机的燃油消耗和排放,实现节能减排的效果。
2 混合动力拖轮的推进系统设计
2.1 传统拖轮推进系统结构
传统港作拖轮根据工况要求,一般会设计成Z型传动,系统由两大部分组成,舵桨推进系统和全回转系统。舵桨推进系统包括主机、离合器、轴系、舵桨等装置。全回转桨系统主要包括液压马达及转舵操纵控制机构,主要作用是实现导流罩的转向,从而实现船舶的360°全回转,提高船舶的机动性。
2.2 混合动力系统的分类
综合考虑港口作业拖船的实际工业,即在港区作业过程中,大部分时间工作在中、低负荷状态,且常态化变速运行。配合优化后的控制策略,最终可以使混合动力系统中的主推进柴油机一直运行在最优负荷点附近,从而达到节能减排的效果。
依照主动力源、辅助动力源电气与机械联接形式;混合动力系统可以分为串联方式、并联方式与混联方式三种。由于篇幅所限,本文仅介绍混联方式。

图1 采用混联方式推进的系统
采用混联方式推动的混合动力系统由柴油机、蓄电池、发电机、变频器、电动机、齿轮箱、螺旋桨等设备组成,其结构示意图如图1所示。
该系统具有串联推进方式和并联推进方式两者的长处,动力源为柴油机与电动机,柴油机的输出功率一部分在并联方式下经齿轮箱驱动螺旋桨,另一部分在串联方式下驱动发电机发电用于给蓄电池充电。由此可见,混合动力系统采用混联式能充分发挥其他两种推进方式的长处,使船舶柴油机自始至终运行在最佳的功率负荷区,进而达到较高的工作效率。
混联方式推进的系统比其他两种推进系统复杂,成本相对较高,船舶的设计、建造以及设备的布置都比较困难,同时对船舶的自动控制、状态模式切换等要求甚高。
2.3 混合动力拖船推进系统的物理模型
三种联接方式,具体选择要根据运行工况、拖船的设备布置、船东用户的使用习惯及船舶的作业模式来决定。
拖船的日常作业模式一般是四种,即电动机单独作用、柴油机单独作用(不为蓄电池充电)、柴油机单独作用(为蓄电池充电)和混合动力驱动。
主推进柴油机可通过离合器直接推动螺旋桨实现机械传动,此时电机作为发电机,发出的电能输送给蓄电池组。当主推进柴油机不工作时,可以利用蓄电池组带动电机实现电力推进,此时电机以电动机方式工作,即电机兼顾发电机组和电动机两用。用电机或专门的发电机组为蓄电池补充电能,作为应急情况下的能量补给,同时蓄电池组也能通过接通岸电进行电能补给。如图2所示。

图2 混合动力拖船推进系统
电机运行性能优于柴油机,其采用现代电气传动的PWM控制技术和直接转矩控制策略等,没有空载和怠速的运行模式,能进行无级平滑调整并回收制动能量。蓄电池的使用可以有效的防止柴油机排放黑烟(特别是船舶突加或突减载荷的时候),有利回收动能,实现能量可逆转化,强化拖轮电站功能、改善电站供电质量和可靠性,极大地提升了拖轮的续航能力。
3 混合动力拖船的模拟设计
3.1 油耗模型
(1)燃油消耗模型
假设柴油机的需求功率为Pd,则负荷百分比Pj为:
Pj=(Pd/Pe)*100%
(1)
式中Pe的取值与柴油机的选型功率有关,对原拖轮取值为1618kW,对新设计的混合动力拖轮取值为1000kW。
根据主推进柴油机机型的负荷特性曲线进行描点,从而得到在不同负荷百分比下的燃油消耗率,见表1。
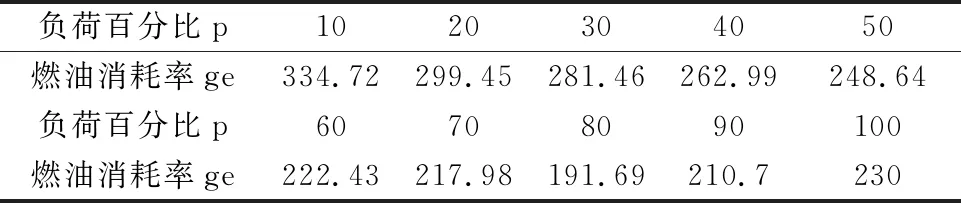
表1 柴油机的燃油消耗率及其负荷百分比的关系表
使用线性内插/外推法得到负荷百分比这p的燃油消耗率ge,单位是g/(kw·h)。从而,建立1-D查询表,如图3所示。
(2)
式中:ge1表示负荷百分比为p1时所对应的燃油消耗率。ge2表示负荷百分比为p2时所对应的燃油消耗率。
港口作业拖轮所使用的是轻油,其密度为ρ=860g/L,则可以得到此时的每秒钟燃油消耗量ge′为:
(3)

图3 油耗模型计算模型
式中:ge′的单位为L/S。
通过对时间的积分便可以计算燃油消耗量fL。
(4)
式中:fL的单位为L。
计算的燃油消耗结果存在MATLAB的工作空间,通过燃油消耗的结果即可计算排放。
3.2 排放模型
符合MARPOL公约附件中关于NOX排放限值的IMO TierII标准。于是,计算NOX、SOX、CO2的排放。
①NOX排放
N+O2→ NOX
(5)
7.4338×p+12.275]÷3600}dt
(6)
式中:fNOX单位为g;Pd为需求功率;P为负荷百分比。
②SOX排放:
S+O2→SOX
(7)
(8)
式中:fSOX单位为g;s代表燃油中的含硫分,单位为%。
③CO2排放:
C+O2→CO2
(9)
(10)
式中:fCO2单位为g;Cf表示基于燃油含碳量的燃油消耗和二氧化碳排放量转换系数。
由于港口作业的拖轮使用的是轻燃料油(LFO),根据表可知,Cf的取值为3.15104,于是根据公式(3-6)、公式(3-8)、公式(3-10)即可建立如图4所示的排放模型。
3.3 电池模型
蓄电池计算模块如图所示,其荷电状态SOC初始值设定为100%。
(1)充电模型
此作业模式是将柴油机发现的多余功率用于给聚合物锂离子电池补充电能,多余的功率除以直流电压可以得到充电电流(直流电压需要转换为380v的交流线电压进行输出),进面通过电流源给聚合物锂离子电池补充电能。充电前设置一个开关来控制电池的功率需求,如果功率需求大于零,则零将流过开关,电池不会充电;如果功率需求为零,则充电电流将流经选择开关对聚合物锂离子电池充电,充电模型如图5所示。
(2)放电模型
本文中,聚合物锂电池的放电控制将使用到绝缘栅双极型晶体管(IGBT),其导通与关断需要根据系统的功率需求来决定。电力器件IGBT导通与关断的驱动信号采用脉冲宽度调制PWM控制技术,它的原理自采样控制理论。如果功率需求高,则占空比也比较大,本文假设电池需求电压V,电池电压用VB表示,电阻用R表示,功率需求用P表示,占空比用D表示,于是存在:
(11)
在放电模型中,占空比D限制为0.9(任意值),再通过比较器,当载波(锯齿波)信号值低于调制信号值(计算所得的占空比)时,则电力器件IGBT处于导通状态ton;当载波信号值高于调制信号值时,电力器件IGBT处于关断toff。
在放电模型中可以通过改变电阻的阻值来调整占空比,由图电池模型可知,对应618kW的电压最大值为592.1595V,则不难算出电阻值R为:

图4 排放模型

图5 电池的充放电模型
(12)
4 对模拟系统的优化
4.1 确定优化设计变量
在此引入“混合度”的概念,定义“混合度”为永磁同步电机的功率占总功率的比值,用符合HF表示。
(13)
式中:PEM为永磁同步电机驱动功率(kW);PDE为柴油机的功率(kW);
在混合度HF=0.38的情况,当混合度HF选用其他数值时,即主机功率、永磁同步电机功率等设备选择其他备选参数时,需要对各备选设备进行组合选型。混合动力拖轮是由多个设备构成的高度复杂的非线性系统,需要考虑的设备参数较多,不可能做到对所有设备的参数进行优化,又因为实际工程中各个设备之间存在着复杂的耦合关系,因此必须综合各主要机械设备的参数进行同时优化选型,这对混合动力拖轮的性能非常重要。本文应用NSGA—II优化算法对混合动力拖轮主要设备进行选型,以满足原拖轮正常作业时的功率需求为基准,选出备选设备的参数,从而实现对混合动力托办各主要设备选型的全局优化,使燃油消耗和排放较传统拖轮大大降低。
4.2 优化目标的确定
在满足拖轮日常工作性能的基础上,应尽可能的使燃油消耗量、废气排放量以及全船总重量得到优化。通常情况下,拖轮废气排放的大小受燃油消耗多少的影响。因此,本文将燃油经济性和设备重量性作为优化目标,其数学表达式如下:
(14)
式中:ffuel(X)、fweight(X)分别代表燃油消耗量、主要设备的重量;X包含系统技术规格和能量管理方法参数;Ω为解空间;tj(X)≥0是对混合动力拖轮设备及全船整体性能的约束函数;本文在考虑聚合物锂电池的稳定性、可靠性和生命力的情况下,将蓄电池荷电状态SOC值的变化作为约束条件,使SOC值始终在[40%,90%]区间内变化,从而使电池组避免了过分充电与过分放电,延长了电池组的使用寿命。
4.3 遗传算法部分参数的确定
种群大小(population size)N决定了优化过程的搜索范围和运算效率,如果增大种群规模N的值,则遗传算法会搜索到很多的点,使优化过程不会过早收敛,进而得到预期的效果。但是N的增大势必会增大优化计算的时间,使计算效率大打折扣。所以,种群规模N的取值不能太大或太小,本文经过反复的试验测试后选取N=50。进化的迭代次数(number of generations)根据大量的试验测试后,选取G=100。在算法优化中,通过交叉步骤(crossover)和变异步骤(mutation)会产生新的子代个体,增大了群体的多样性。其中,交叉过程是遗传算法从种群个体中搜索优良基因并组合搭配到子代个体,本文选用高效率且高鲁棒性的BLX-α混合交叉算子,为了在开发征与利用之间得到最佳的权衡,本文设定BLX-αparameter=0.5。变异过程则是任意选择群体中某个个体,改变其串值,正是由于该过程的存在,使得种群个体的适应度值更高。如果变异概率取值过大,会破坏种群个体优良基因,如果取值过小会使优化计算出现过早收敛。因此,在本文中设定遗传算法的变异概率(mutation probability)值为10%。另外,设定优化算法中设计变量的染色体长度取值为5。
5 结 论
本文通过对拖船作业模式的分析,提供混合动力推进“绿色船舶”的优越性和设计方案,由此建立了系统计算模型,并运用NSGA-II优化算法,对“混合动力拖进行优化”。该解决方案完全可延伸至多种性能目标。本文的研究为多能源混合动力推进模式设计,与运行提供了理论依据和工程解决方案,为绿色船舶的发展做出相应的技术准备。
