基于故障估计的分布式驱动电动汽车容错控制方法*
2019-07-10欧健陈瑞楠杨鄂川张勇
欧健 陈瑞楠 杨鄂川 张勇
(重庆理工大学,重庆 400054)
主题词:电动汽车 分布式驱动 失效 容错控制 故障估计
1 前言
相较于传统汽车,四轮独立驱动的分布式驱动电动车因其系统构成简单、输出响应迅速、各车轮可独立控制等特点,越来越受到研究者们的关注[1-2]。研究表明,当车辆驱动系统失效时,车辆状态可能发生不可预知的偏差[3],主要表现为跑偏、加速慢和动力学特性改变等[4]。
针对容错控制问题,Hu J等学者利用自适应PID控制、D*最优控制等方法计算出修正故障所需前轮附加转角[5-6]。上述方法为自适应或被动容错控制方法,具有一定的容错效果,但并未在控制器设计中充分利用当前车辆故障状态信息。部分学者提出了关闭失效驱动轮和对侧驱动轮的控制思想,这可以在车辆驱动系统部分失效的情况下保证一定的驱动能力,但削弱了车辆的动力性和横摆稳定性[7]。为进一步提升故障车辆的动力性和横摆稳定性,文献[8]提出了一种基于规则的驱动力分配方法,对故障车辆剩余驱动力进行分配,该方法针对失效的不同情况分别提出不同的控制策略,但未对故障估计进行讨论。
分布式驱动电动车驱动系统失效多为乘性失效[4],本文针对其发生乘性失效时动力性、稳定性下降的问题,设计了一种基于故障估计的分层容错控制器,对当前车辆故障进行估计,并计算车辆当前纵、横向力需求,使用PI控制方法与模型预测控制方法搭建上层运动控制器,将纵、横向力需求具体化,并输入下层驱动力分配控制器,将纵、横向力需求按一定规则分配到各车轮,以期达到充分利用车辆剩余驱动力的目的,进一步提升分布式驱动电动车的安全性。
2 故障车辆建模
建立车辆模型如图1所示。忽略空气阻力,以及垂向、侧倾和俯仰运动,车辆动力学方程为:
式中,vx、vy分别为纵向和侧向速度;r为横摆角速度;Fx=[Fx1Fx2Fx3Fx4]T、Fy=[Fy1Fy2Fy3Fy4]T分别为左前、右前、左后和右后轮的纵、横向力,在本文中,各轮纵、横向力地面反力可由Pecajka魔术轮胎公式[9]计算;Bx、By为车辆模型固有参数[10]。
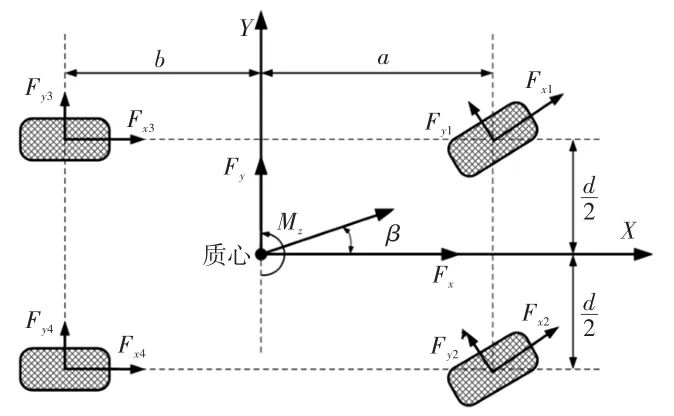
图1 车辆模型
对车轮旋转过程进行受力分析,可得车轮旋转运动的动力学方程为:

式中,Jωi为车轮转动惯量;Ti为驱动系统驱动力矩;R为车轮滚动半径;ωi为各轮滚动角速度;Fxi_roll为车轮受到的滚动阻力;Fzi为各轮受到的垂向地面反力;Rc、Rv为与滚动阻力有关的计算因子,取值由轮胎台架试验获得;vxi为各车轮轮心沿X轴方向的运动速度;i=1,2,3,4分别表示左前、右前、左后和右后轮。
分布式驱动电动车驱动系统失效主要分为乘性失效、偏差型失效、随机性跳动和卡死型失效等[11]。假设某轮电机输出力矩与控制输入的关系为:
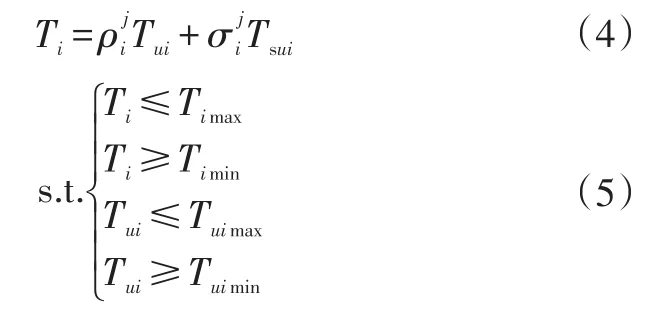
由于分布式驱动电动车驱动系统失效多为乘性失效[4],式(4)可简化为:

式中,ki∈[0,1]为乘性失效的失效因子。
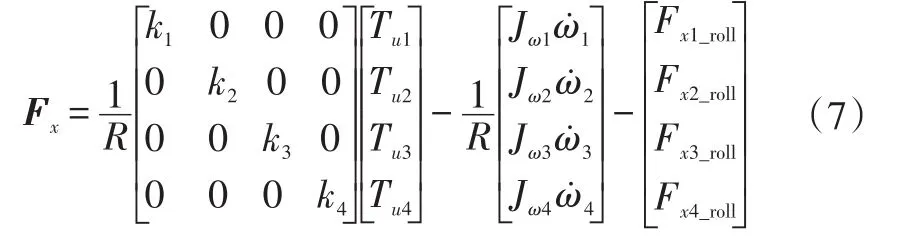
则车轮受到的地面纵向反作用力也可计算为:
3 故障估计
假设所需参数已由卡尔曼滤波[12]等方法获得,且数据较为精确。由式(7),有

同理,当前乘性失效因子估计值为:

式中,与_roll分别为使用七自由度车辆模型估计得到的轮胎纵向力与滚动阻力。
显然,存在

选取李雅普诺夫函数:

对时间t求微分得:
选取李雅普诺夫控制律:

式中,L为控制律设计参数。
显然,存在L>0使得(t)<0,表明该控制律能够使(-ki)逐步趋近于0。
在故障估计器设计过程中,需要对故障估计结果的可信度进行判定,以检验其在实时工作中的可信度。由于车辆模型忽略了侧倾、空气阻力等因素的影响,且建模时不可避免地会产生误差,必然导致Fxi的计算发生偏差。在本文中,认为该偏差可用di=-Fxi表示,假设在设计过程中Fxi可在仿真或试验中由某种方法或设备获得,则式(8)可改写为:

定义估计值与真实值k0i间的误差eki为:


当ki=k0i时,系统未发生故障,存在
当ki≠k0i时,车辆驱动系统发生乘性故障,存在时,可以认为当前车辆驱动系统发生故障,若存在
4 控制器设计
4.1 上层运动控制器
4.1.1 纵向运动控制器
根据文献[13]中的思想对当前车辆纵向力需求进行计算,搭建用以跟踪目标车速的PI控制器。为了降低PI控制器的设计难度,本文将控制器输出归一化,认为其输出α∈[-1,1]。若α≥0,纵向力需求为正;若α<0,纵向力需求为正。则总的纵向力需求可表示为:

式中,vT为目标车速;v为当前车速。
根据文献[14]中的方法,对纵向力需求进行估算:

4.1.2 横向运动控制器
本文使用模型预测控制的方法[15]计算当前所需控制量。使用经过修正的车辆质心侧偏角与横摆角速度响应xref=[βref,rref]T作为参考状态[16]。使用带有附加前轮转角和附加横摆力矩的分段仿射非线性二自由度单轨车辆模型作为预测模型[10],考虑状态量偏差与控制量变化率对车辆的影响。
对二自由度单轨车辆模型进行离散化处理,得到增量状态空间模型:

式中,A、B和C为模型固有参数;x(k)=[xq(k)-xq(k-1)y(k)]T;Δu(k)=u(k)-u(k-1);xq(k)=[r(k)β(k)]T、u(k)=[δAFS(k) ΔM(k)]T分别为k时刻的状态向量和控制向量;r(k)、β(k)、δAFS(k)、ΔM(k)分别为k时刻车辆横摆角速度、质心侧偏角、附加前轮转角和附加横摆力矩。
定义k时刻对(k+p)时刻的预测状态为x(k+p|k),设控制器预测时域为p、控制时域为q,则系统从k时刻到(k+p)时刻的预测输出为:

设输出响应的目标值为:

定义模型预测控制的优化目标函数为:

式中,τQ、τR为加权系数矩阵;rq(k)为输出响应的目标值。
由最小化目标函数Ju可以获得最优控制输入序列ΔU,取其第一项即可计算得到控制输入u(k)。
4.2 下层驱动力分配控制器
由于车辆驱动器故障存在一定的特殊性,下层驱动力分配控制器应对故障驱动电机进行一定限制,防止故障进一步扩大[17]。由于车用轮毂电机扭矩输出大多与输入电流线性相关,当电机发生乘性故障时,电机输出能力将下降。为了避免输入电流过大造成电机进一步损坏,需要对电机负荷率进行讨论[18]。定义电机负荷率为:

为求得各车轮输出最优分配率,本文以附着裕度与电机负荷率加权最优为目标,设路面附着系数为μ,则路面附着裕度可以定义为:

则优化目标函数可以写为:

由于目前的技术限制,暂不能对车轮侧向力进行直接控制,因此对目标函数进行简化,同时引入加权因子以协调附着裕度与电机负荷率的关系,式(29)可以改写为:

并结合实际物理条件对其进行约束:

式中,τO、τP为加权系数矩阵;δ为前轮转角,取输入值与附加前轮转角之和,即δ=δd+δAFS;d为轮距。
通过最小化目标函数求解以获得当前分配到各车轮的实际控制律Tui。
5 仿真验证
本文采用CarSim/Simulink联合仿真检验所建立容错控制器的性能,以CarSim中C-Class Hatchback车型为对象,选取直线加速与单移线两种工况进行仿真。为了对轮胎力加权分配法进行评价,将本文提出的方法与文献[10]中的轮胎力平均分配方法和不进行控制时的仿真结果进行对比。
5.1 开环直线加速工况
选取附着系数为μ=0.8的路面,初始车速40 km/h进行急加速,设置α为某一定值,且转向盘转角恒定为0°,左前轮驱动系统在第1 s时突然发生k1=0.3的故障。仿真结果如图2所示。

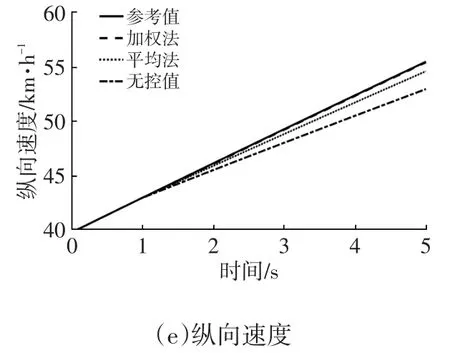
图2 直线加速工况仿真结果
由图2可知,当车辆近似直线行驶时,所设计的故障估计器能够有效地对当前失效因子进行估计,但图2中故障因子估计曲线明显存在大于1和偏差的情况,这是由于建模误差等因素造成的。仿真结果表明,所设计的控制器能够鲁棒地容忍该影响。由于并未引入轨迹跟随控制,当故障发生时,受控制器响应滞后等因素的影响,车辆轨迹与参考轨迹间将发生偏差。由图2可以看出:在不进行控制时,车辆轨迹与参考轨迹间的偏差呈现明显的加速增大趋势;加权分配法能够有效减轻偏差持续增大的趋势;若使用传统驱动力平均分配的方法对所需附加横摆力矩进行分配,偏差增大的趋势较为不明显。纵向速度跟随方面,加权分配跟踪性能最好,平均分配法次之,无控制时跟踪效果最差。
5.2 闭环单移线工况
选取附着系数μ=0.3的路面,初始车速为100 km/h,设驾驶员预瞄时间为0.8 s、反应滞后时间为0.1 s,左前轮驱动系统在第1 s时突然发生k1=0.3的故障,假设故障估计完全正确,进行单移线试验。仿真结果如图3所示。
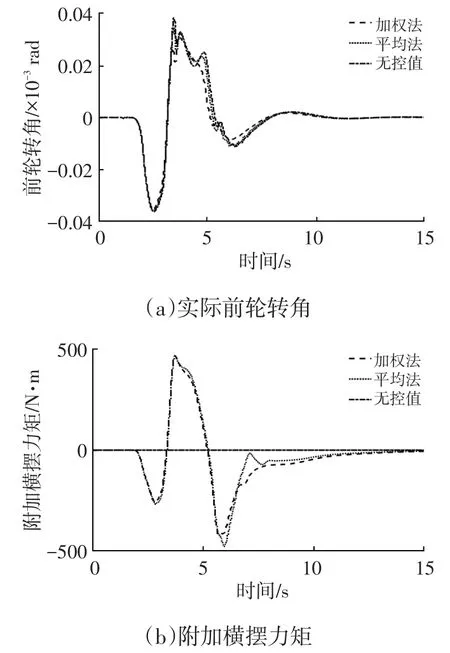
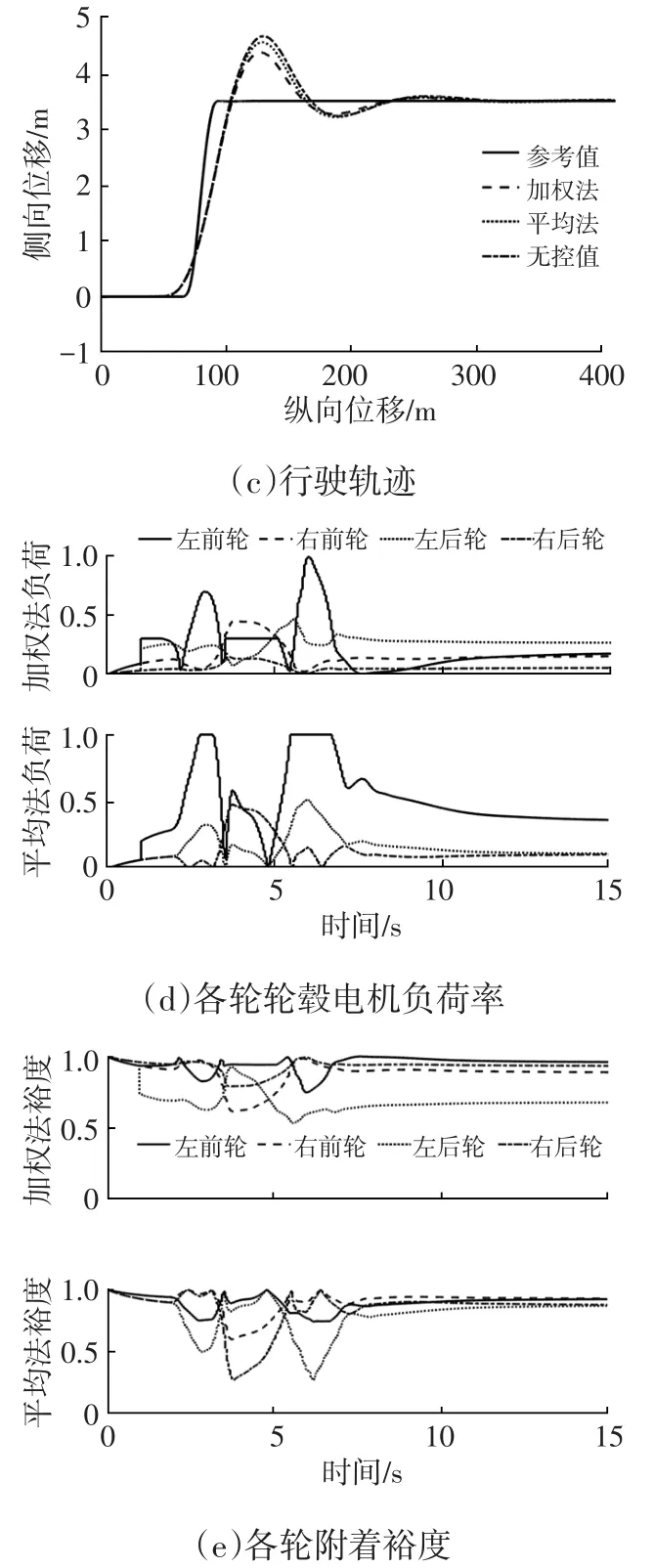
图3 单移线工况仿真结果
由图3a~图3c可知,在车辆转向时,控制器施加与转向方向相反的附加前轮转角,减小转向轮的实际转向角,同时对车辆施加一定大小和方向的附加横摆力矩,以改善车辆在低附着系数路面上的转向能力。从图3d和图3e中可以看出,在平均分配法中,车轮负荷率较高,且附着裕度利用不均,而加权法能够在各轮轮毂电机负荷率和各轮附着裕度之间有效地进行平衡,使各车轮有更多剩余附着裕度,同时可降低各轮轮毂电机负荷率。
综上,故障估计器结果能够较为准确地描述当前系统乘性故障,控制器能够有效跟踪参考信号,当驱动系统失效发生时,下层转矩分配器能够有效对剩余的驱动能力进行调控分配。因此,本文所设计的容错控制器能够改善故障车辆的安全性能。
6 结束语
针对分布式驱动电动车驱动系统发生故障时的容错控制问题,本文设计了一种基于故障估计的容错控制方法,得到以下结论:使用模型参考自适应方法建立的故障估计器能够实时、有效地对分布式驱动电动车驱动电机的乘性失效故障进行估计;基于模型预测控制理论,考虑多重优化目标与多重物理约束建立的容错控制器能够有效对故障车辆进行控制,改善其横摆稳定性和动力性。
