基于图像处理的船舶水尺计重系统设计
2019-07-03
(大连海事大学 信息科学技术学院,辽宁 大连 116026)
散装货船所运输的矿砂、煤炭、谷物等货物都具有不易用衡器计量的特点,国际上通常利用水尺计重的方法进行交接。船舶水尺计重依据阿基米德原理求取载货量,船舶吃水深度测量是该过程中最为重要的环节,通常需要专业的水尺检定人员观测吃水线在水尺上的位置来实现[1]。由于传统的人工观测法容易受到观测者经验和海浪起伏的影响而产生偏差,近年来超声波测距仪被用于测量甲板和水面之间的距离并由此换算出吃水深度,使用这种方法,温度和湿度对测距精度造成的影响明显[2]。其他基于电导、电容、光电传感等测量方法在实际测量中的应用也很有限,主要是因为这类传感器的安装和日常维护中的诸多不便[3-5]。为此,考虑基于图像处理的水尺计重系统借助具备高清摄像功能的爬壁机器人采集水尺图像,利用数字图像处理技术实现船舶吃水深度的自动分析,通过分析涵盖多个波浪起伏的多幅水尺图像来综合判定吃水深度,降低风浪所造成的影响。采用这种方法,整个测量过程都可被数字化地记录下来,便于在发生贸易纠纷时为事后查验提供证据。
1 系统构成
依据国内通行的《驳船水尺计重技术规程》,水尺计重系统由数据采集子系统和数据处理子系统构成,并通过4G网络来实现两者间的数据交换,见图1。
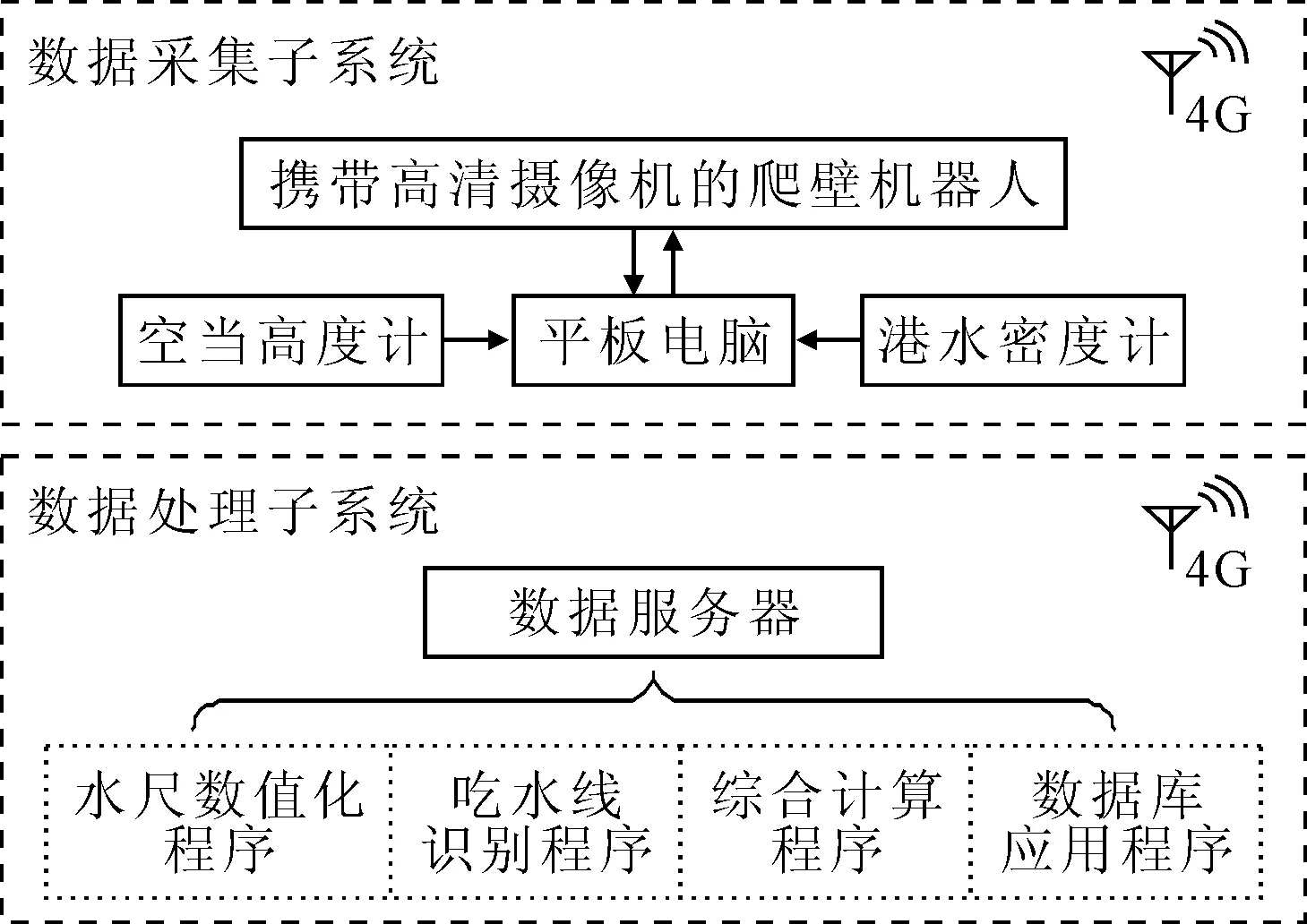
图1 船舶水尺计重系统构成
数据采集子系统在平板电脑的控制下分别实现水尺图像采集、水油仓空当高度测量和港水密度测量工作,并通过4G网络将数据上传至数据处理子系统。数据处理子系统的核心是一台高性能的数据服务器,接收平板电脑传送的水尺图像及其他测量数据,计算得到船舶的载重量。通过4G网络回传测量结果至平板电脑进行显示,利用数据库应用程序将相关测量数据和计算结果保存在数据库中。
借助爬壁机器人实现水尺图像的采集是数据采集子系统中的关键。船舶的6面水尺中,近岸侧的3面水尺便于从码头上进行观察,另一侧的3面水尺则通常需要借助小艇或绳梯接近观察。传统的人工观测容易受到风浪影响,同时对检定人员的安全也构成威胁[6]。借助爬壁机器人,可接近水尺进行图像采集来替代传统的人工观测。操作者可从船舷任意位置放下爬壁机器人,根据摄像机传送至平板电脑的实时图像控制机器人游走于船侧板,即使在非可视区域也能顺利完成水尺图像采集[7],见图2。由于轻微风浪便会导致吃水线在水尺上的位置呈现起伏变化,传统人工观测法在风浪较大时准确地判断吃水深度较为困难,因此也是检定过程中最容易引起货运双方质疑的关键。利用数字图像处理技术快速分析能够涵盖多个波浪起伏的水尺图像,再对所得的吃水深度求取算术平均作为输出结果,能够有效提高船舶吃水深度判定的准确性。

图2 借助爬壁机器人进行水尺图像采集现场
2 图像处理
2.1 水尺数值化
通常情况下由爬壁机器人采集的水尺图像(图3)并不适合直接进行水尺数值化。主要归因于受海水侵蚀和污渍影响而产生的图像噪声,以及受拍摄位置限制而导致的字符形变。根据水尺字符的颜色特征和排列特点,利用二值化图像垂直投影统计中呈现出的计数增高剪裁出图4a)所示的局部图像。考虑到标准的米制水尺中作为吃

图3 爬壁机器人所采集的某散货船外侧水尺图像

图4 水尺字符图像的预处理结果
水深度参考的字符仅包含数字“0~9”和字母“M”,可采用处理文字图像常用的形态学算法对图像进行降噪。对比图4a)与图4b)可以看出,降噪后图像中的孤立噪声明显减少,字符边缘变得平滑且未发生结构上的明显改变。在图4b)的水平方向上做投影统计,同样利用其中呈现出的计数增高便可得到图4c)所示的字符图像。字符中的错切变形角度则可利用图4d)所示的投影方法提取,即当投影角度θ与错切变形角度相等时投影长度L可取得最小值,矫正结果见图4e)。
考虑到水尺标注通常符合《船舶水尺标志勘划标准》的样式,采用模板匹配算法对图像中的字符进行识别比较快捷[8]。由于该方法仅对字符的简单特征进行比较,在区分“6”“8”“9”几个相似字符时的准确率稍低,特别是在海水侵蚀导致字符局部污损的情况下。为提高字符识别的准确率,采用能够权衡字符多个特征权重来进行判定的神经网络算法更为合适[9-11]。用于字符识别的典型三层BP-神经网络见图5。
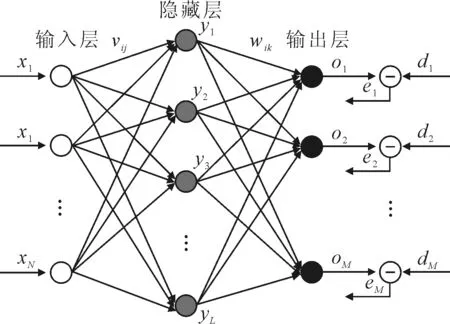
图5 用于字符识别的神经网络结构
设神经网络输入为x1,x2,…,xi,…,xN,则将隐含层输出y1,y2,…,yj,…,yL和神经网络输出o1,o2,…,ok,…,oM表示为
(1)
(2)
BP-神经网络的输入层由93个节点组成,涵盖了水尺字符的轮廓特征、网格特征、投影特征等多个参数。输出层由11个节点组成,分别对应数字“0~9”和字母“M”。隐含层由48个节点组成,其中每个节点都分别与输入层和输出层的全部节点相连接。当神经网络的输出结果o1,o2,…,ok,…,oM与期望值d1,d2,…,dk,…,dM不相符时,可将产生的误差E反向传输至网络之中。
(3)
按照梯度下降法调整层间权值vij和wjk。
(4)
(5)
经过多次往复便可得到正确的输出结果,进而通过多幅典型水尺图像的反复训练,最终形成适应性较强的神经网络结构。
2.2 吃水线识别
得益于爬壁机器人在采集水尺图像时可以灵活地调整拍摄角度,吃水线在图像中的位置和方向可控,给吃水线识别带来了较多方便。识别的关键在于排除水面波动引起的反射光干扰,准确区分船侧板与水面之间的界线,常用的检测算子包括Sobel、Log、Canny等[12-13]。在利用以上传统边缘检测算子进行识别时,确定滤波器的大小和阈值存在较大困难,还时常得到上下2条难辨真假的吃水线。其中的假水线是由于波浪起伏在船侧板留下的水痕,见图6a)。受到海水浸润的船侧板会发生亮度变化,造成其与相邻区域灰度值上的不连续,这种特征在晴朗的天气下尤为明显。
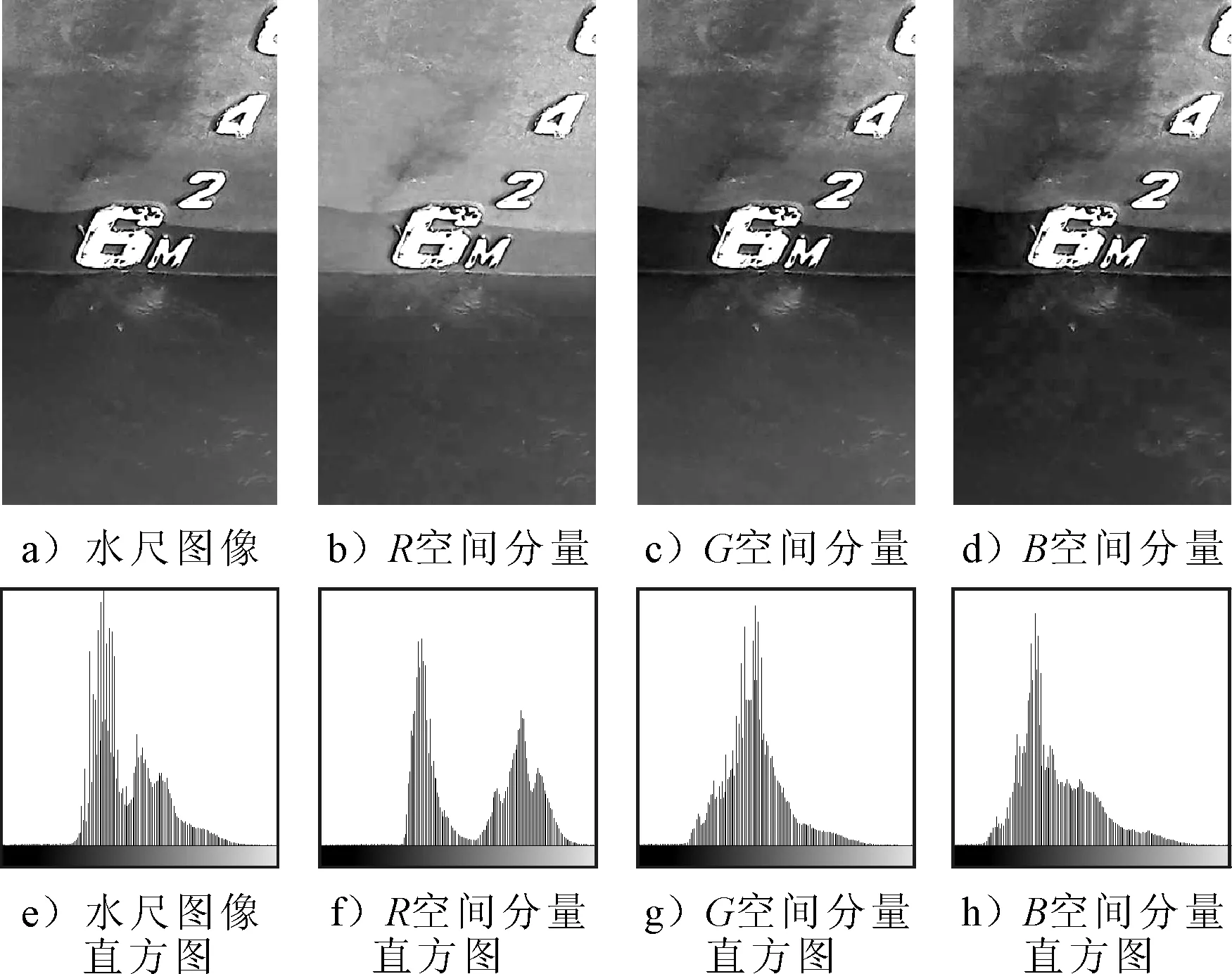
图6 水尺图像的RGB空间分量及其直方图
考虑到船侧板与水面在颜色上存在明显的差异,考虑基于彩色图像分割算法对不同颜色空间的图像进行分析,实现吃水线在水尺图像中的准确定位。
观察水尺图像6a)所对应的灰度直方图6e)可以看出,在灰度值分布较为集中的区域隐约存在双峰结构。提取RGB空间分量图6b)、c)、d),对比其直方图6f)、g)、h)的分布特征发现,R空间直方图中呈现出明显的双峰结构。由于散货船浸没在水下部分的侧板通常涂装具有特殊防腐蚀作用的红色油漆,而货物码头的浑浊海水多呈现暗绿色至暗黄色,所以两者之间在灰度值分布上会呈现出较明显的差别。于是可以在R空间直方图中选取两峰间最低处所对应的灰度为阈值T,对图像中的船侧板和水面进行准确分割。则对于R空间图像中的任意像素点R(x,y),根据阈值T分割得到的像素点RBW(x,y)表示为
(6)
式中:1为目标;0为背景。
海水浸润导致对R空间图像影响较小,而且以直方图中2峰间最低处对应的灰度为阈值能够避免局部颜色差异带来的干扰,分割结果中未留下假水线的明显痕迹,见图7。
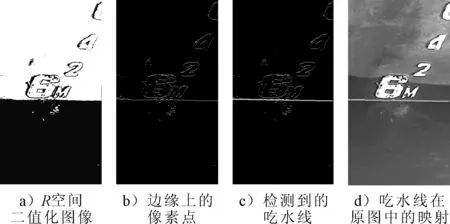
图7 基于彩色图像分割的吃水线识别结果
进一步提取图7a)所示的分割结果可得到图7b)所示的边缘像素点。所得图像中一条由边缘像素点构成的吃水线已清晰可辨,不过图像中的噪声点也造成了吃水线的不连续,而且这种情况在吃水线横跨过水尺字符时表现得尤为突出。利用霍夫变换把不连续的像素组装成线段,并选取其中横跨整幅图像的那一条得到图7c)所示的吃水线。在选取吃水线时可将其位置限定在下半部分图像中,将其角度限定在±15°之间,以提高对其判定的速度和准确率。再将吃水线重新映射到原图中,形成图7d)所示的吃水线位置标记。
2.3 吃水深度计算
吃水深度计算的关键在于比较吃水线在数字化水尺上的位置,还应特别注意水尺图像中不同字符间距的变化情况。摄像机与水尺间的拍摄角度会导致字符间距发生变化。通常图像中越靠近吃水线的字符间距越小,利用非线性拟合确定吃水线上下2个字符间像素所代表的吃水深度变化量。考虑到利用霍夫变换求取的吃水线位置可达到亚像素量级,使得吃水深度最终计算精度达到1 mm,明显高于规程中10 mm的单次观测精度要求。此外,可进一步求取20P连续水尺图像的平均吃水深度作为最终输出结果,以降低波浪起伏对吃水深度计算带来的影响。
3 实验结果
首先在6 000 t远洋实习船“育鲲”上进行船舶水尺计重系统功能测试,又在黄骅港的多条散货船上进行了现场实验。黄骅港某57 000 t散货船的外侧三面水尺测量结果见图8,利用装载煤炭的15 min作业间隔时段便得以完成测量,耗时相对于借助小艇或绳梯进行观测的传统方法优势明显。20P连续水尺图像的平均吃水深度输出分别为3.056、5.942和8.786 m,而单幅图像所得吃水深度的波动范围均超过100 mm。
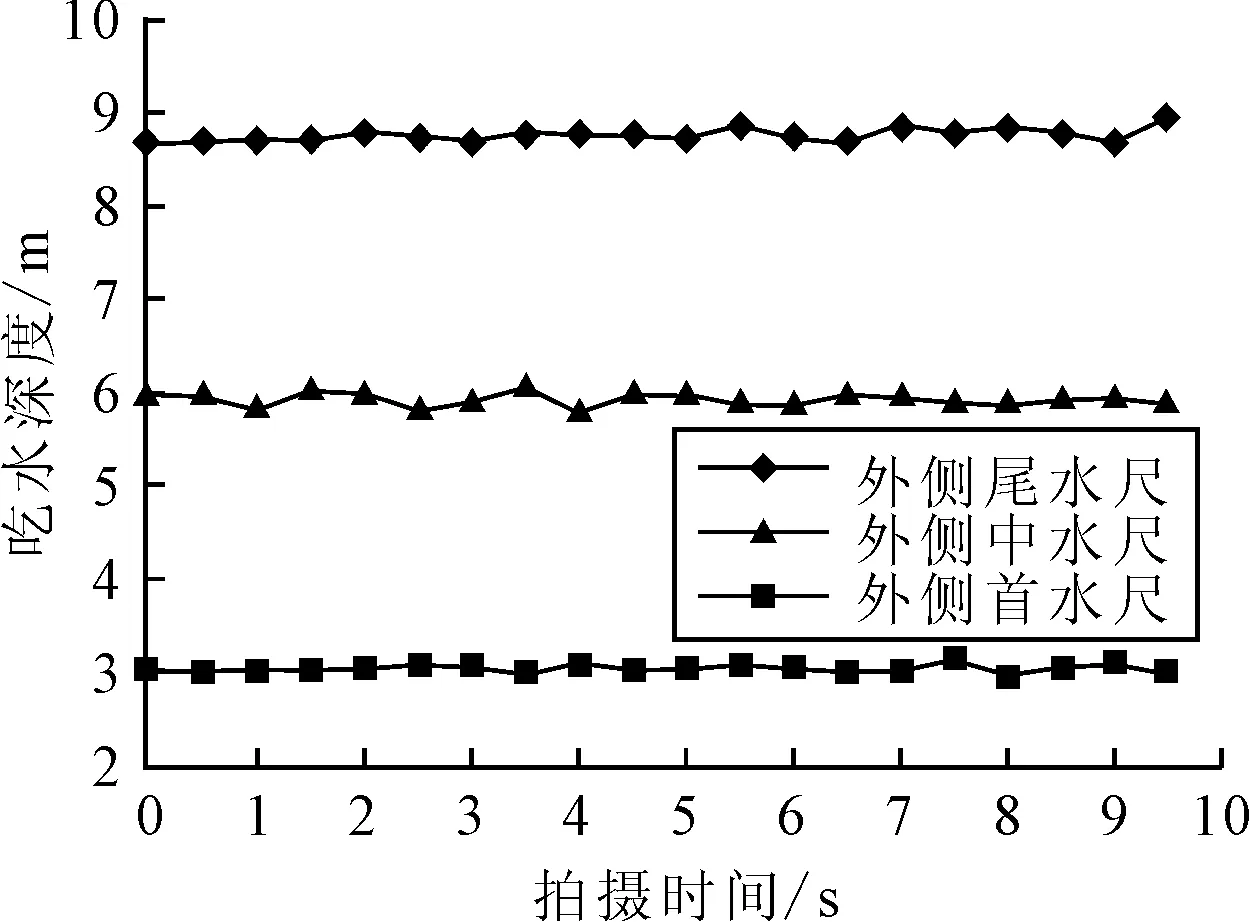
图8 某散货船外水尺测量结果
4 结论
基于图像采集和处理的水尺计重方法能够满足《驳船水尺计重技术规程》的要求,并且不需要对船舶进行改造或加装传感器。借助具备高清摄像功能的爬壁机器人采集水尺图像,可以避免检定人员攀爬绳梯接近水尺的危险。利用数字化图像处理技术分析吃水深度,可以消除传统人工观测中主观因素的影响。求取多幅水尺图像的平均吃水深度作为输出结果,更可有效降低风浪所造成的影响,特别顺应现代化港口对精细化管理的需求。此外,考虑到水尺计重工作即使在夜间也应照常进行,此时所拍摄水尺图像中的颜色特征会发生明显变化。因而还需要研究权衡RGB、YUV、HSV等多种颜色空间分量来综合判定吃水线位置的方法,以进一步提高水尺图像处理算法的适应性。