双馈风电机组分布式协调频率控制方法研究
2019-07-01席嫣娜王印松
席嫣娜 王印松


摘要:该文提出一种双馈风电机组分布式协调频率控制方法,以改善系统频率响应特睦。根据系统供需关系选择双馈风电机组运行模式,由所提分布式算法实现双馈风电机组减载水平的迭代更新,进而快速响应系统频率变化。所提分布式控制方法可协调不同风速条件下的双馈风电机组,并实现与火电机组间的协调控制,有效改善系统动态性能。最后,通过仿真分析对所提分布式协调频率控制方法的有效性进行验证。结果表明:该分布式协调频率控制方法可快速根据系统供需情况及时调节机组输出功率,有效改善系统频率响应特性。
关键词:双馈风电机组;火电机组;协调控制;系统频率
中图分类号:TM712 文献标志码:A 文章编号:1674-5124(2019)01-0128-06
0 引言
在能源供应紧缺和环境保护双重压力下,随着风电等新能源发电技术的不断成熟,电力系统中新能源渗透率不断提高[1]。风電机组一般处于最大功率跟踪模式(maximum power point tracking,MPPT),自身功率调节能力有限[2]。MPPT运行模式虽保证了风电机组的最大利用效率,但也可能导致供大于求的供需失衡状态,且在孤岛电力系统中上述问题将更为突出[3-5]。同时,由于风电机组主要经由电力电子换流器接人电网,难以响应系统频率的动态变化,因此在大规模风电并网系统中,频率稳定性问题更为严重[6]。
为改善大规模风电并网条件下系统频率的响应特性,目前已有较多学者提出不同的频率控制方法对此开展研究[7-10]。为使双馈风电机组(doubly fedinduction generators,DFIGs)等变速型机组响应系统频率变化,附加虚拟惯性控制、一次调频等方法已被广泛应用。Morren等Ul提出模拟同步机惯性响应特性的虚拟惯性控制方法,利用风电机组的旋转动能有效降低了系统频率变化率。为改善双馈风电机组控制对系统频率的支撑作用,曹军等[8]提出一种附加频率控制策略,可快速响应系统频率变化。基于分段控制思想,林俐等[9]提出一种双馈风电机组有功一频率控制策略,并讨论了频率控制的参数整定问题。风电机组间的协调控制多是集中式控制,需要复杂的通信网络收集全局信息。何成明等[10]通过考虑风电场内各风电机组所处风速条件,提出了一种集中式的风电场时序协同调频策略,但并未实现系统频率的无差调节。因风电机组出力波动性较大,集中式控制很难快速响应系统动态变化,且运行可靠性难以保证。为此,本文针对包含多风电机组、火电机组的孤岛电力系统,提出一种分布式协调控制方法,以改善系统频率响应特性。
基于多智能体系统的分布式控制方法在较多文献中得到了普遍应用[11-13],本文中,风电机组作为独立智能体,根据负荷需求与双馈风电机组最大可输出功率间的关系确定风电机组的运行模式。首先,本文分析了风电机组的控制系统模型,包括减载控制模型,根据风速、转速等条件确定双馈风电机组的减载控制方式;其次,提出了双馈风电机组的分布式协调频率控制方法,应用分布式算法对风电机组可利用因子进行迭代更新,并根据风电机组可利用因子、系统频率偏差确定风电机组与火电机组间的协调控制方式。最后,通过仿真算例验证了所提控制方法的有效性。
1 双馈风电机组控制系统模型
1.1 双馈风电机组模型
图1所示为双馈风电机组并网系统,包括异步电机、轴系动态以及控制系统模型。其中控制系统模型包括桨距角控制、转子侧换流器(rotor-sideconverter,RSC)控制系统、网侧换流器(grid-sideconverter,GSC)控制系统3部分。
1.2 减载控制模型
双馈风电机组的空气动力学模型为
P=KwVw3Cp(λ,β)
Kw=1/2ρA(1)
式中:ρ——空气密度;
A——风电机组有效的扫风面积;
Vw——风速;
Cp——风电机组功率系数;
λ——尖速比:
β——桨距角。
风电机组功率系数Cp的表达式为
若Cpmax为Cp(λ,β)最大值,则风电机组输出的最大功率为
Pm=KwVw3Cpmax
风电机组一般处于MPPT运行模式,但在一些条件下需要进行减载,以维持系统功率平衡。针对处于减载状态的双馈风电机组,其输出功率为
Pw=ηPm=ηKwVw3Cpmax其中,η为减载状态下风电机组的可利用因子。
目前,实现风电机组减载运行的控制方式主要有两类:1)变桨距控制,通过增大风电机组的桨距角储存备用功率,当系统出现功率缺额时,通过增大桨距角以提供功率支撑;2)超转速控制,通过调整风电机组运行工作点实现减载运行,将其运行工作点调整至功率特性曲线峰值的右侧。
超转速控制和变桨距控制方式均需通过风速所处区间范围选用相应控制方式,从而实现减载运行。文中改进减载控制方式的控制框图如图2所示,主要包括3部分,即风速所处区间模式判断部分、虚拟惯性控制部分、减载控制方式选择部分(超转速控制、变桨距控制)。减载控制方式通过判断输人变量Uw、ωr实现控制方式的选择,并确定η;虚拟惯性控制输入变量为频率偏差Δf,因下文所提分布式协调控制主要根据频率比例分量进行控制,为进一步改善频率响应特性,可通过附加虚拟惯性控制模拟同步机惯性响应特性,从而有效改善系统频率动态变化。
2 分布式协调频率控制方法
2.1 双馈风电机组分布式协调频率控制
本文研究对象为孤岛电力系统,如图3所示,并网开关S处于断开状态。该孤岛系统包括双馈风电机组(Wi,i=1,2,…)、火电机组(Gi)及负荷(Li)。
若忽略网损,图3所示系统的功率平衡关系为
式中:Pli——节点i所接负荷大小;
Pwi——第i台双馈风电机组输出功率;
Psgi——第i台火电机组输出有功功率;
N1、Nw、Nsg——分别为负荷、双馈风电机组、火
电机组的数量。
对于式(4),定义负荷需求Pd为
双馈风电机组在MPPT运行模式下最大输出功率总和为
通过对比负荷需求Pd与Pwm间的关系,判定双馈风电机组的运行模式。当Pd≥Pwm,則所有双馈风电机组需运行于MPPT模式,若依然存在功率缺口,则由火电机组进行补充。当Pd
通过与其他频率控制方法进行对比验证分析,对比方法包括未采用频率控制方法,仅依靠火电机组惯性响应;火电机组AGC调节;风电机组附加频率控制以及本文所提分布式协调频率控制方法。图7为系统未采用频率控制方式,当节点17负荷突变后系统频率的变化特性。当火电机组未启动调速器且双馈风电机组未采用附加频率控制时,仅在火电机组惯性响应特性下,系统频率变化将越限(超出频率安全范围±0.2Hz),上升至50.3Hz,
图8对比了3种频率控制方式下系统频率的变化特性。第1种控制方式为仅火电机组参与调频,双馈风电机组未附加频率控制。在该控制方式下,由于火电机组AGC作用,使系统频率最终恢复至稳定值,但系统频率超调量较大,峰值达到50.05Hz。第2种控制方式为文献[7]中提到的附加频率控制方法,包含一次调频和虚拟惯性控制两部分。该控制方式相比于火电机组AGC控制,其响应速度较快,且超调量较小,但并不能实现无差调节。第3种控制方式为本文所提分布式协调频率控制,在该控制方式下系统频率迅速恢复至稳定值,调整时间<5s,且超调量较小,峰值低于50.03Hz。由以上分析可知,采用分布式协调频率控制可使系统频率快速恢复至稳定值,且相比于AGC及附加频率控制,其超调量较小。这主要是由于火电机组AGC响应时间较长,而风电机组采用电力电子换流器控制,其控制响应速度快,因而可有效改善系统频率响应特性。
3.2 变风速运行模式
本小节将对变风速运行模式下,分布式协调频率控制方法的有效性做进一步验证。2台双馈风电机组对应的变风速曲线如图9所示,其中双馈风电机组1处于高风速范围;相比于双馈风电机组1,双馈风电机组2风速较低。因双馈风电机组1的风速较高,将处于定功率运行模式,功率波动较小。仿真系统波动主要来源于双馈风电机组1,该机组风速介于初始风速与额定风速之间。
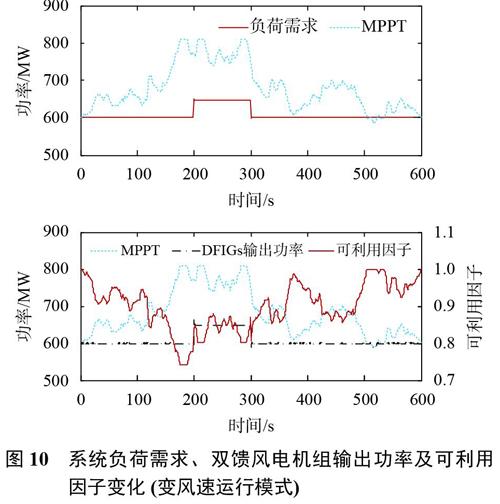
系统负荷需求、2台双馈风电机组在MPPT运行模式下总输出功率变化,以及双馈风电机组的实际总输出功率、可利用因子变化如图10所示。为进一步验证所提分布式协调频率控制方法的有效性,在仿真时间200~300s,节点17的负荷增加50MW。
由图10可以看出,在仿真时间0~500s之间,双馈风电机组需减载运行以满足系统功率平衡条件。当双馈风电机组在MPPT运行模式下输出功率增大时,可利用因子将减小,反之,当风电机组在MPPT运行模式下输出功率减小时,可利用因子将增大。在0~500s的仿真时间内,双馈风电机组的可利用因子值始终小于1,通过减小其输出功率实现系统功率平衡。而在500~550 s内,负荷需求Pd大于Pwm,双馈风电机组处于MPPT运行模式,此时双馈风电机组在MPPT运行模式下的输出功率与其实际输出功率曲线重合。
变风速运行模式下系统频率响应特性如图11所示,在负荷功率突变区间外,系统频率变化均稳定在较小范围内,随着风速的变化系统频率可快速恢复至稳定值,从而进一步验证了所提分布式协调频率控制方法的有效性。当负荷功率突变时,如图11中200s和300s的时刻显示,系统频率均出现较大变化,且收敛速度较快。在500~550s仿真时间内,因负荷需求Pd大于Pwm,双馈风电机组处于MPPT运行模式,火电机组需通过AGC增发功率以满足系统功率平衡条件。在此情景下,响应速度较慢的AGC使系统频率恢复至稳定值,但频率变化速度缓慢。因此,由图11中500~550s仿真时间内的系统频率变化过程,进一步验证了双馈风电机组与火电机组间协调控制的必要性。
4 结束语
为改善孤岛电力系统频率响应特性,本文提出了一种双馈风电机组分布式协调频率控制方法。根据负荷需求与双馈风电机组最大输出功率间的关系,确定风电机组的运行方式。当负荷需求小于双 馈风电机组最大输出功率时,双馈风电机组需根据可利用因子进行减载运行,以实现系统功率的动态平衡。所提分布式协调频率控制方法可快速根据系统供需情况及时调节机组输出功率,有效改善系统频率响应特性。
参考文献
[1]刘吉臻.大规模新能源电力安全高效利用基础问题[J].中国电机工程学报,2013,33(16):1-8.
[2]杨列变,丁坤,汪宁渤.双馈异步风电机组模拟惯量响应控制技术综述[J].中国电力,2014,47(11):79-83.
[3]周专,姚秀萍,常喜强,等.大规模风电并网对孤网频率稳定性影响的研究[J].中国电力,2014,47(3):28-32.
[4]陈树勇,朱琳,丁剑,等.风电场并网对孤网高频切机的影响研究[J].电网技术,2012,36(1):58-64.
[5]TAN Y,MEEGAHAPOLA L,MUTTAQI K M.A suboptimalpower-point-tracking-based primary frequency responsestrategy for dfigs in hybrid remote area power supplysystems[J].IEEE Transactions on Energy Conversion,2016,31(1):93-105.
[6]唐西勝,苗福丰,齐智平,等.风力发电的调频技术研究综述[J].中国电机工程学报,2014,34(25):4304-4314.
[7]MORREN J,HAAN S W H D,KLING W L,et al.Windturbines emulating inertia and supporting primary frequencycontrol[J].IEEE Transactions on Power Systems,2006,21(1):433-434.
[8]曹军,王虹富,邱家驹.变速恒频双馈风电机组频率控制策略[J].电力系统自动化,2009,33(13):78-82.
[9]林俐,李晓钰,王世谦,等.基于分段控制的双馈风电机组有功-频率控制[J].中国电力,2012,45(2):49-53.
[10]何成明,王洪涛,孙华东,等.变速风电机组调频特性分析及风电场时序协同控制策略[J].电力系统自动化,2013,37(9):1-6.
[11]LI Z,ZANG C,ZENG P,et al.Fully distributed hierarchicalcontrol of parallel grid-supporting inverters in islanded acmicrogrids[J].IEEE Transactions on Industrial Informatics,2017,14(2):679-690.
[12]NEDIC A,OZDAGLAR A.Distributed subgradient methodsfor multi-agent optimization[J].IEEE Transactions onAutomatic Control,2009,54(1):48-61.
[13]OLFATI-SABER R,FAX J A,MURRAY R M.Consensusand cooperation in networked multi-agent systems[J].Proceedings of the IEEE,2007,95(1):215-233.
