智能草莓田间管理机器人的设计
2019-06-28陈思羽邱学华陈晨
陈思羽 邱学华 陈晨


摘要 为适应基于现代农业发展的“智造”需求,解决目前草莓大棚化种植人工管理投入大、供过于求等难题,设计出一款智能草莓园管理机器人。该装备可实现对草莓的成长环境监测调控、远程查询生长状况、草莓成熟期自动采摘装袋等功能。该款智能草莓园管理机器人通过四轮移动平台,可以在草莓大棚宽道上来回移动;通过温湿度传感器实时监测单株草莓的生长环境,从而可以实时对植株的生长状况进行调控;同时,设计有喷洒农药的自动喷洒泵,可以单株对点喷洒农药;通过具有颜色识别功能的草莓采摘头,识别成熟的草莓并进行采摘装袋。该款草莓园管理机器人的研发,对提高草莓行业的种植效率和采摘效率,实现草莓大棚管理的无人化、智能化、标准化将发挥重要作用。
关键词 草莓;田间管理;采摘;机器人
中图分类号 S224文献标识码 A
文章编号 0517-6611(2019)10-0179-03
Abstract An intelligent strawberry garden management robot was designed in order to meet the needs of modern agriculture development and solve the problems such as large investment in artificial management and oversupply of strawberry plantation. The equipment can monitor and control the growth environment of strawberry, inquire the growth status of strawberry remotely, pick and pack bag automatically in the ripening period of strawberry and so on. The intelligent strawberry garden management robot can move back and forth in the strawberry shed wide lane through a fourwheel mobile platform. The temperature and humidity sensor can be used to monitor the growth environment of a single strawberry plant in real time, so that the plant growth can be regulated in real time. At the same time, an automatic spraying pump can be designed to spray pesticide per plant. Ripe strawberries can be identified and picked by a strawberry picking head with color recognition function. The design of the robot will play an important role in improving planting and picking efficiency of strawberry industry, realizing unmanned, intelligent and standardized management of strawberry shed.
Key words Strawberry;Field management;Pick;Robot
近年來,随着草莓育种与栽培技术、病虫害防治技术以及深加工技术的进步,草莓种植在全世界得到了极大的推广。目前在一些地区草莓种植已成为当地农业的支柱产业,成为农民致富的主要来源。我国现在草莓的种植方式以现代化大棚种植为主,这种方式不仅提高了草莓的产量和质量,也给草莓种植农户带来了巨大的经济效益[1-3]。
草莓果实的成熟期短,不容易采摘,柔软的果肉容易在采摘过程中受到伤害,影响储存和运输。由于草莓特殊的生长特性和果实形态等特点,草莓果实比较脆弱,加上其体积较小,所以存在较高的破碎率和漏采率[4-6]。发达国家的农业即使已实现了高度自动化,但采摘环节仍依赖大量人工来完成。因此,实现采摘作业的自动化已成为农业生产发展的现实需求。目前国内外针对温室采摘机器人技术开展了大量研究[7-11],但草莓田间管理的自动化程度仍然较低。笔者针对目前国内外草莓生产、研究的现状,对适用于我国栽培草莓的管理机器人进行研究,设计出对草莓园进行全面智能管理的机器人,旨在实现草莓管理的标准化和智能化。
1 智能草莓田间管理机器人的总体设计思路
草莓的管理和采摘需要严格的管理方式,该机器人为了解决上述问题,方案最终确定为无人控制的管理系统,移动平台会根据草莓种植的规模和具体的路径设定移动的轨迹和速度。运用温湿度传感器检测草莓种植大棚的温湿度,并实时反馈给管理者,从而达到更加合理地管理草莓的生长环境,确保草莓质量的目的。通过温湿度监控装置返回的指令,喷洒模式可依据温湿度反馈情况随时自动启动喷水,也可根据管理员预先设定的日期实现自动启动并执行喷药、喷营养液等功能。采摘方面,采摘头的槽内装有颜色传感器,机器根据颜色色度准确地识别色彩不一的物体或物体的不同部位,当检测到成熟草莓时,机器就会完成自动采摘并装袋,然后运输到大棚两端的架子上继续采摘。智能草莓园管理机器人外形如图1所示。
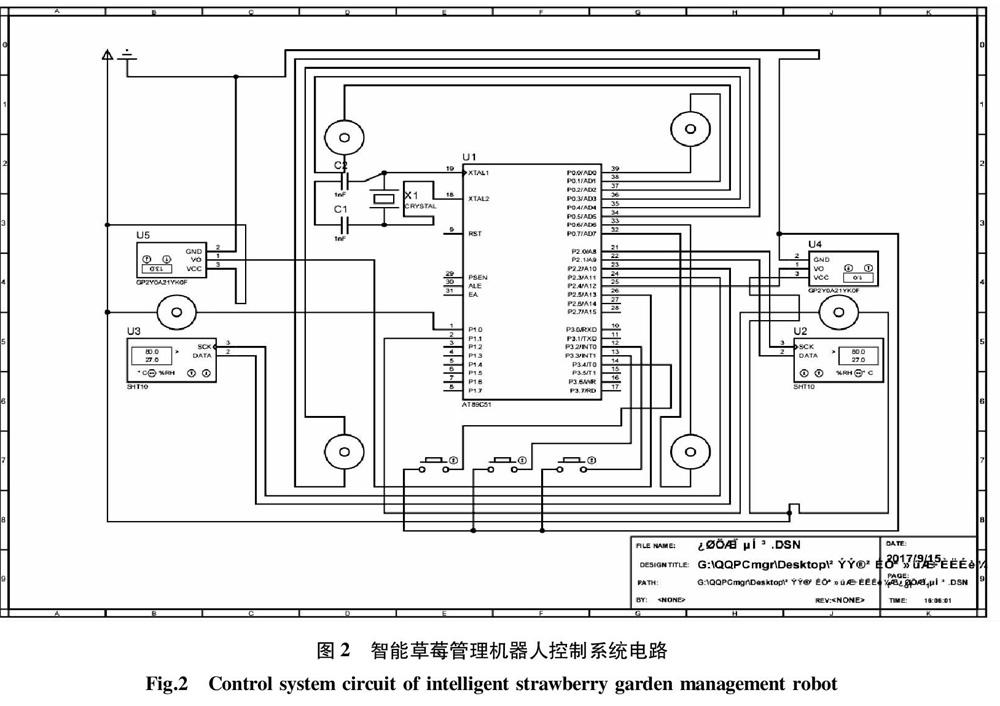
2 智能草莓管理机器人控制设计
移动平台采用的是四轮四电机驱动移动平台,采用铝合金框架式车身,上部可载有控制盒、储物箱和采摘臂(图3)。其框架大小是根据实体大棚2个草莓种植槽之间的距离设定的,可以确保顺畅通过直接通道,同时还方便转向、起动和停止。在控制上,采用的4个供力电机均由单片机控制,提高了准确性和灵活性。
采摘头有一个倾斜的通杆,上方装有2个固定的口,用于让草莓果实从上方通过,方便口中的颜色传感器识别草莓的成熟度,在口的后侧是一个用舵机带动可以旋转的切割头,用于割断成熟草莓的茎。采摘头利用视觉定位,主要是利用人眼水平视差三角原理进行空间坐标计算。在草莓采摘机器人中,使用双目视觉进行草莓空间坐标的定位。首先,要对双目视觉传感器进行单目标定,从而获得视觉传感器的内部参数;其次要进行视觉传感器的双目标定,从而获得2个视觉传感器的空间旋转(R)和平移矩阵(T)。在获得视觉传感器的内参和外参后,需要对视觉传感器采集到的草莓图像进行双目矫正,从而使得图像的垂直视差为0。在得到双目矫正后的图像后,需要对草莓图像颜色进行阈值分割。通过颜色阈值分割,将草莓和环境背景相分离。随后进行图像形态学处理,通过膨胀腐蚀、空洞填充,从而获得草莓的理想二值化模型。草莓采摘头外形如图4所示。
3 智能草莓管理机器人的工作模式
该系统包括生长期温湿度检测与控制、喷洒模式、成熟期草莓采摘3种工作模式。这3种工作模式分别由3个独立按键来控制完成,用户只需要在起始位置选择自己的工作方式就可以让它自行工作。
3.1 温湿度检测模式
该模式下机器人通过温湿度传感器检测草莓生长温湿度,如果出现异常就作出提示,检测的数据通过SIM900A传输到管理者的手机,管理者可以根据该信息进行调控,执行喷洒、控光或者通风控制,具体流程如图5所示。
3.2 喷洒模式
该模式下用户先将配制好的农药装进机器人的储物仓内,连接上喷洒管,然后将机器人安放到起始位置,机器人会自动按照预先设定的路线进行喷洒作业,光电传感器检测到植株后将信息返回给单片机,单片机控制农药喷洒泵喷洒水、农药或者营养液。智能草莓管理机器人喷洒控制程序如图6所示。喷洒模块的开发,实现了喷洒的细化、小型快速化,并且这样的喷洒模式有利于农作物的均匀调控,保证了植株的受药量统一,不仅具有原来机器喷洒的快速高效,而且防止了人体受到农药的侵染、引发过敏等一系列伤害。
3.3 成熟期草莓采摘模式
该研究的草莓自动识别与定位技术采用比较成熟的RGB颜色模型,RGB颜色模型以三基色为基准,通过改变三原色的数量,可以混合出不同的颜色。通过摄像头获取草莓视频图像,然后利用图像分割技术,完成对成熟草莓的识别和空间坐标定位,以及实现草莓收获的自动化。
草莓采摘功能是该机器人的主要功能,这样的采摘方式与原来的人工相比不仅速度快而且高效,避免了手与草莓的接触,减少了对草莓的伤害和污染,延长了草莓的贮运时间。
4 结论
该款草莓智能管理机器人通过自动控制和简单的检测传感器结合,实现了集检测、田间管理、采摘于一体的智能化管理。其中无线模块的运用,使管理者可实时远程监测并进行田间管理。该款机器人操作简单,不仅解决了草莓种植管理上的难题,还为农业无人化、智能化技术的推广和应用奠定了良好的基础。
参考文献
[1] 李长勇,房爱青,谭红,等.高架草莓采摘机器人系统研究[J].机械设计与制造,2017(6):245-247,251.
[2] 房爱青,李长勇,黄艳华,等.草莓采摘机器人的草莓定位算法研究[J].现代制造技术与装备,2016(10):90-92.
[3] 马瑛,杨旭.草莓采摘机器人成熟果实识别及避障控制系统研究:基于ARM与FPGA[J].农机化研究,2017(2):181-185.
[4] 刘志刚,王风燕,魏纯.精密草莓采摘机器人的优化设计:基于光程调节结构[J].农机化研究,2016(6):16-20.
[5] 刘继展.温室采摘机器人技术研究进展分析[J].农业机械学报,2017,48(11):1-18.
[6] 侯贵洋,赵桂杰,王璐瑶.草莓采摘机器人图像识别系统研究[J].软件,2018,39(6):184-188.
[7] 楊松,贾英崎,蔡文博,等.手提式草莓采分一体化装置设计[J].科学技术创新,2018(23):179-180.
[8] 翟毅豪,邓志恒,张俊雄.温室采摘机器人末端执行器研究进展[J].农业工程技术,2018,38(22):22-28.
[9] 殷建文,赵桁晨,赵帅,等.草莓采摘机设计[J].科技风,2018(20):1-2.
[10] 李冲冲,马晓录,郭永刚,等.一种跨垄式草莓采摘车的设计[J].机械研究与应用,2018,31(3):146-148.
[11] 王兴,邹姚姚,孙猛猛,等.吸取切断式草莓采收装置的系统设计[J].南方农机,2018,49(11):78-79.
