基于RBF+NTSMC的舰载火箭炮随动系统控制研究
2019-06-25陈机林侯远龙王经纬
项 军,陈机林,侯远龙,王经纬,王 明
(南京理工大学 机械工程学院,江苏 南京 210094)
火箭炮在发射时,受到如负载瞬间变化大、燃气流冲击等强干扰影响,会导致定向管产生振动。在此工况下,导致系统的某些参数的不确定性,影响了火箭炮射速、跟踪精度等性能指标,使后续火箭弹发射精度降低[1-2]。因此,研究针对火箭炮系统性能提高的控制策略,是增强火箭炮系统的发射精度的有效途径。
滑模变结构对控制系统具有很强的鲁棒性,对控制系统参数摄动、外部干扰具有不变性[3]。但传统线性滑模存在问题:使系统状态逐渐趋近于给定轨迹, 但却永久无法达到给定的轨迹。文献[4]提出了非奇异终端滑模控制(non-singular terminal sliding mode control,NTSMC)这一概念。相对于线性滑模,NTSMC具有能够在有限时间收敛、跟踪精度高等优点[5]。但为了提高NTSMC快速响应以及系统的鲁棒性,文献[6]采用非线性扰动观测器和NTSMC结合的控制策略。文献[7]在指数趋近律基础上,结合了Terminal吸引子与系统状态变量的幂函数,但幂函数增加了控制的复杂性。
RBF神经网络对非线性系统具有很强大的映射能力[8]。依据RBF神经网络的逼近特性,可逼近被控对象模型的未知参数。将RBF神经网络和NTSMC策略结合起来,使系统对参数摄动和鲁棒性有所提高[9]。笔者针对舰载火箭炮交流伺服系统进行数学建模,并对基于RBF神经网络的NTSMC进行模型设计和数值仿真。为舰载火箭炮系统非线性补偿提供了一种解决方案,且实现算法较为简单,仿真及台架实验都取得了良好的控制效果。
1 系统组成及数学模型的建立
1.1 系统组成及工作原理
舰载火箭炮系统框架如图1所示。该系统是由火控系统控制箱、伺服放大器、D/A转换器、旋转变压器、RDC模块等构成。

系统执行流程:舰载火箭炮系统是一种机电结合的火控系统,上位机给出方向和高低角度,控制箱计算出当前控制信号,并由D/A模块转变成数字量信号,伺服放大器对数字量信号放大处理。然后传送到驱动器中,并依据速度反馈来调节电机转速。最后,经过减速器把机械动力传递给发射架。发射架的实际位置通过高精度旋转变压器采集位置信号,再由RDC转换模块转换后,反馈到火控系统控制箱中。
1.2 系统模型建立
舰载火箭炮交流伺服系统可简化为一个二阶系统,控制器将位置误差换算成一个对应于电机理想转速的电压值,然后传递给放大器。其系统框图如图2所示。

图2中:θref为设定的目标位置(角度);θ为负载当前角度位置;U为控制电压;Ka为放大器增益(含功率放大器);L为电枢回路电感;R为电枢回路电阻;Ea为电机电枢反电动势;Kt为转矩系数;Te为执行电机电磁转矩;TL为负载扰动力矩;J为电机转子上的总转动惯量;B为粘性摩擦系数;ωm为电机角速度;Ke为执行电机的反电动势系数;i为减速比。
根据伺服系统结构框图2知,执行电机电磁转矩为:
(1)
根据系统框图,由机械运动方程可得:
(2)
将式(1)带入式(2)式得:
(3)
式(3)两边同乘以1/Ji,并整理得:

(4)
电机在执行过程中,其电流时间常数远小于机械时间常数。因此,可忽略电流响应的延迟时间,即:
(5)
式(4)进一步化简为

(6)

(7)

2 基于RBF+NTSMC设计
2.1 非奇异终端滑模控制器
为了使控制系统能够提高火箭炮的射速以及跟踪精度,因此控制器滑模面被设计为非奇异终端滑模[10],其表达形式:
(8)
式中,p和q为正奇数并满足1
针对式(7)的非线性系统,设计一种自适应变速指数趋近律:
(9)
式中:k>0;ε>0;c>0.

设计控制律:
(10)
2.2 RBF神经网络控制设计
RBF神经网络结构如图3所示,其采用2-7-1的3层神经网络架构,即输入层含有2个变量,隐含层为7个神经元节点,输出层输出uRBF.

1)第1层:采用向量矩阵x=[x1,x2]T作为该神经网络的输入层参数。
2)第2层:作为隐含层,高斯函数作为其基函数,设计了7个神经元节点,即h=[h0,h1,…,h6]T.
(11)
式中:j为网络隐含层第j个网络输入;cj为基函数的宽度;bj为基函数的中心。
3)第3层:作为输出层,即输出uRBF,向量W=[w0,w1,…,w6]是隐含层和输出层之间的权值,由图3可知:
(12)
RBF网络输入输出算法为[11]:
f(x)=W*Thf(x)+εf,
(13)
g(x)=V*Thg(x)+εg,
(14)
式中:W*和V*分别为逼近f(x)和g(x)的理想网络权值;εf和εg均为网络逼近误差值,|εf|≤εMf,|εg|≤εMg.
取x=[x1,x2]T,则RBF输出为:
(15)
(16)
式中,hf(x)和hg(x)为RBF网络的高斯基函数。
上述式中出现的f(x,t)和g(x,t)均为未知参数,采取RBF神经网络去逼近未知量f(x,t)和g(x,t).
经过RBF网络逼近后,式(10)的控制律变为:
(17)
2.3 基于RBF神经网络的NTSMC控制器设计
综上可知,设计基于RBF神经网络的NTSMC系统框图如图4所示。

3 基于RBF+NTSMC稳定性分析
设计Lyapunov函数为:
(18)


(19)

(20)
将(20)式代入(19)式得:

(21)
故取自适应律为:
(22)
(23)
则可得:

(24)

4 仿真分析
仿真中要用到的主要参数:R=0.4 Ω,J=5 239 kg·m2,TL=9.32 kN·m,i=1 039,p=9,q=7,B=1.43×10-4N·m/(rad·s-1),Kt=0.195 N·m/A,Ke=0.197 V/(rad·s-1).已知式(22)~(23)以及 (17)中的参数:γ1=10,γ2=1.0,ε=10,k=2,c=5,β=5.
为了突显本文提出的控制方法的有效性。仿真比较NTSMC和基于RBF神经网络的NTSMC在舰载火箭炮系统中控制效果上的差异。
设定目标角度为20°,仿真时间为10 s,阶跃响应曲线如图5所示。

从图5中可知:传统的NTSMC和基于RBF神经网络的NTSMC均无超调。但传统的NTSMC,其响应时间达到了2.1 s,而基于RBF神经网络的NTSMC,响应时间仅为1.2 s,比NTSMC约快了1倍。这表明基于RBF神经网络的NTSMC系统具有更快的响应速度,有利于火箭炮系统的快速跟踪。传统的NTSMC,其稳态误差为0.09°,而基于RBF神经网络的NTSMC,最终跟踪稳态误差只有0.03°,远小于传统NTSMC的稳态误差,表明基于RBF神经网络的NTSMC系统性能更好,有利于火箭炮精确发射。
负载扰动的阶跃响应曲线如图6所示,6.5 s时在负载上间隔0.4 s加载负载,形成脉冲力矩来模拟火箭炮发射时的冲击载荷。从图中可知:采用基于RBF神经网络的NTSMC,系统产生的偏移较小,且能够更快地恢复到目标位置,因此提出的控制方法抗干扰能力强。

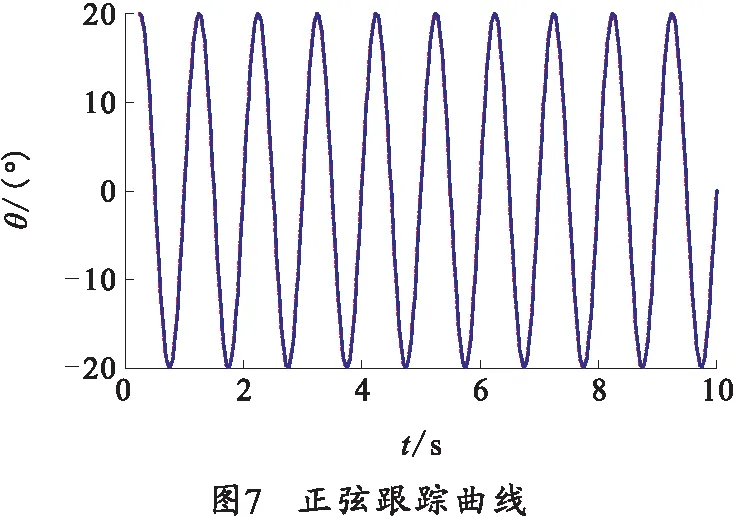
输入信号y(t)=20 sin(2πt),幅值为20°,周期为1 s,仿真时间为 10 s,正弦跟踪及误差仿真曲线如图7、8所示。控制策略采用基于RBF神经网络的NTSMC方法,尽管系统未稳定时正弦追踪误差较大,最高峰值达到0.15°,但其迅速调整并进入良好的跟踪状态,最终的误差范围保持在±0.055°,满足火箭炮发射精度的要求;当控制算法采用传统的NTSMC时,起始的最大误差为±0.4°,经过一段时间的调整后其最终的误差范围在±0.14°内,严重不符合火箭炮精度要求。由此可知,控制策略采用基于RBF神经网络的NTSMC能有效提高系统跟踪能力、保持较好的鲁棒性以及提高了火箭炮发射精度。

5 结束语
针对系统中存在的火箭炮射速、跟踪精度问题,提出基于RBF神经网络的NTSMC控制策略。结合了NTSMC在非线性系统中的优越性和RBF神经网络良好的逼近性能,这样既保持了基本滑模控制强鲁棒性的优点,同时,使系统响应速度快,提高跟踪精度,具有良好的动静态性能,使火箭炮能够精准发射。仿真结果进一步验证了基于RBF神经网络的NTSMC的有效性,能够很好地提高舰载火箭炮系统的控制性能。
