汽车集成式真空助力主动制动系统和控制算法
2019-06-14王陆林刘贵如
王陆林,刘贵如
(1.奇瑞汽车股份有限公司 前瞻技术研究院, 安徽 芜湖 241006; 2.安徽工程大学 计算机与信息学院, 安徽 芜湖 241000)
随着智能车技术的快速发展,市场对主动制动技术有着迫切需求。目前比较主流的主动制动系统是在传统液压制动系统的基础上增加主动增压装置实现的。按照主动增压装置所采用的实现方式进行分类,目前的主动制动系统主要分为两大类:第1类是基于电子液压增压装置的主动制动系统,在原车制动主缸与ABS/ESP之间双输入管路上或者直接在4个轮缸管路上增加液压主动增压装置实现主动增压,文献[1-4]分别给出了实现方案。该类方案主要采用液压泵和高压储能器形成压力源进行提前建压,缩短制动响应时间,同时通过高速开关阀实现制动压力调节。增压阀普遍采用常闭阀、减压阀普遍采用常开阀实现,保证制动结束后液压缸制动力能完全释放。但是保压时需要减压阀持续通电,时间过长容易导致电磁阀发热烧坏,所以无法实现长时间保压。第2类是基于电子机械增压装置的主动制动系统,在原车制动主缸上或者4个轮缸上增加增压装置实现主动增压,文献[5-6]分别给出了实现方案。该类方案采用机械减速增矩机构和滚柱丝杠在将电机输出扭矩放大的同时将转动转化为平动,作用于液压制动主缸或者轮缸实现制动。制动力保持也需要电机堵转,时间过长容易烧坏,所以也无法提供长时间保压。另外该类方案成本高,机械结构可能会出现锁死的问题。除了以上两类实现主动制动的方式外,目前还有一种基于真空助力器的主动助力制动方案。对传统真空助力器进行改进,通过控制真空腔、工作腔和外部大气之间的通断实现助力增压、保压和减压,完全模拟人工踩踏机械制动踏板的过程,实现主动制动。目前有两种典型的实现方式:第1种是基于电磁铁和套管的集成式真空助力器,文献[7-10]分别给出了实现方案,通过增加的电磁铁和套管对大气阀和真空阀进行控制实现主动助力制动;第2种是基于两位三通电磁阀的集成式真空助力器,文献[11]给出了实现方案,通过两位三通电磁阀对真空腔、工作腔和大气之间的通断进行控制,从而实现主动助力制动。以上两种方案均能实现主动助力制动,但是也存在一个共性的问题,就是制动力保持时(即保压)需要给电磁铁或者电磁阀进行通电。长时间通电容易导致元件过热损坏,故无法满足极端工况下长时间制动和驻车制动需求。
本文充分分析了以上方案的原理、优点和缺点,并针对几种方案存在的共性问题,提出了改进的集成式真空助力主动制动系统。在文献[11]的基础上,采用带自锁机构的三位三通电磁阀替换两位三通电磁阀,实现掉电状态下制动力的长时间保持,满足行车过程中长时间持续制动和驻车制动需求,同时针对目前普遍采用的液压力闭环控制算法控制过程复杂、响应慢的问题,提出了改进的制动控制算法。
1 典型的真空助力主动制动系统
1.1 基于电磁铁的真空助力主动制动系统
在真空助力器中增加电磁铁和套管对真空阀和大气阀进行控制,文献[7-10]对该方案的结构以及工作原理进行了详细描述,并给出了电磁铁的数学模型和参数设计。通过仿真试验,所设计的电磁铁在开环控制的前提下能实现对真空阀和大气阀的控制,体积和原真空助力器相同,结构简单,不占用额外安装空间。系统结构示意图见图1。

1.制动主缸活塞; 2.真空源; 3.真空腔; 4.工作腔; 5.电磁铁线圈;6.电磁铁铁芯; 7.阀座; 8.电动套管; 9.助力推杆
图1 基于电磁铁的真空助力主动制动系统结构示意图
本方案通过给电磁线圈通电产生磁场,对磁铁的位移进行控制,磁铁再推动套管实现对真空阀和大气阀的位移控制,通过改变电磁线圈的电流,控制电磁铁位移的大小,实现真空阀和大气阀的开闭,达到助力增加、保持和减小的目的。为实现助力保持,将2个阀门控制在一定位移范围内,给电磁铁线圈持续通电。长时间通电线圈会发热烧坏,故无法满足极端工况下长时间助力保持需求。另外,由于系统采用开环控制方式,所以在设计参数确定的前提下,在长时间的使用过程中会发生位移偏移,有可能导致主动制动功能失效。
1.2 基于电磁阀的真空助力主动制动系统
该方案不直接控制原真空阀和大气阀,而是在原真空助力器的真空腔和工作腔上各引出一个通气管路,通过一个两位三通电磁阀实现对真空腔、工作腔和大气之间的通断,实现助力增加、保持和减小。文献[11]对该方案的结构和工作原理进行了详细介绍,系统结构见图2。通过控制三位三通电磁阀实现完全模拟原车驾驶员踩踏制动踏板实现助力增压、保压和减压的制动过程。另外,通过在液压主缸外安装的霍尔传感器对主缸活塞所处位置进行检测,确保主缸活塞在设定的位移范围内运动。
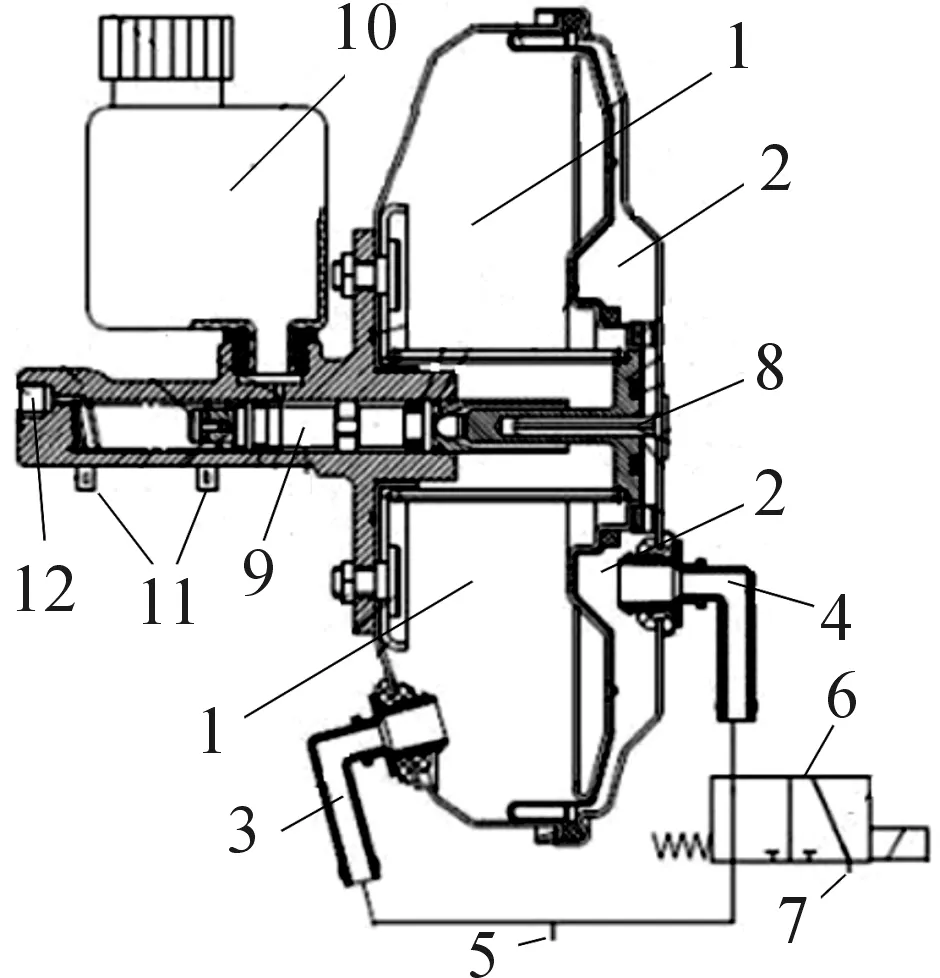
1.真空腔;2.工作腔;3.真空腔管;4.工作腔管;5.真空源;6.两位三通电磁阀;7.大气管;8.助力推杆;9.液压主缸;10.油壶;11.霍尔位置传感器;12.液压压力传感器
图2 基于电磁阀的真空助力主动制动系统结构示意图
当给两位三通电磁阀通电时,工作腔和真空腔隔离,工作腔和大气腔导通,系统处于助力增加阶段。
当两位三通电磁阀掉电时,工作腔和真空腔导通,工作腔和大气腔隔离,系统处于助力减小阶段。
由于该方案无法实现助力保持,所以文献[11]引入了高压储能器,并通过高速常闭开关阀实现主动增压和保压,但是对和原车ABS/ESP制动系统如何集成,如何保证人工制动的有效性及可行性没有做进一步的阐述。如果采用文献[1-4]类似方案和原车制动系统集成,则存在无法长时间保压的问题,唯一不同就是文献[11]采用真空助力主动建压,而不是通过液压泵实现主动建压,其控制过程更加复杂,主动制动时不仅要控制增压阀和减压阀,还要控制两位三通电磁阀进行不断的补能,同时采用了储能器缩短了制动响应时间。该方案制动力的控制和调节仍然采用常闭增压阀和常开减压阀实现,当需要保持制动压力时,需要给常开减压阀通电保压,存在长时间通电线圈发热容易烧坏的问题,无法满足极端工况下长时间持续制动的需求。另外,该方案引入了液压减压压力闭环控制,增加了控制的难度。在实际使用过程中,如果反复制动,复杂的建压过程可能会导致制动延迟和制动力有时偏软的问题。
2 改进的真空助力主动制动系统
上述两种方案虽然能实现主动助力制动,但均存在问题。文献[7-10]所采用的图1方案存在以下问题:① 通过控制电磁线圈电流实现电磁铁的位置开环控制时,位置精度差,使用时间长后容易发生位移漂移,导致主动制动失效;② 电磁铁线圈发热导致无法实现长时间助力保持。文献[11]采用的图2方案存在以下问题:① 通过两位三通电磁阀实现真空腔、工作腔和大气之间的通断时,只能实现助力增加和减小两个过程,无法实现助力保持;② 采用高能储压器缩短了系统建压时间,但是可能存在油液泄露的风险;③ 通过在制动主缸和原车ABS/ESP双输入管路上增加常闭增压阀和常开减压阀实现主动增压装置和原车制动系统的集成,通过控制常闭增压阀和常开减压阀实现制动力的调节,但仍存在文献[1-4]类似的问题,即常开减压阀需要通电才能实现助力保持,无法满足极端工况下的长时间助力保持需求。
2.1 系统总体结构
本文针对以上两个方案存在的问题,对图2方案进行了改进,提出基于带自锁机构功能的三位三通电磁阀的真空助力主动制动方案,结构示意图见图3。
原真空助力器的真空腔和工作腔进入管分别和三位三通电磁阀的其中两路接口连接,电磁阀的另外一路接口直接连通大气。本文在文献[11]的基础上,针对其存在的问题做了如下改进:① 将其采用的两位三通电磁阀替换为带自锁机构的三位三通电磁阀,在自锁机构的配合下,三位三通电磁阀可以实现主动助力增力、助力保持和助力减力的控制;② 去掉了高压储能器、常闭增压阀和常开减压阀以及液压压力传感器,避免了高压储能器液压泄露的风险,保证了人工制动的有效性,同时结合预建压,缩短了系统响应时间;③ 增加了冗余的真空腔和工作腔的机械隔离设计,在驾驶员踩踏制动踏板进入人工制动模式时,可以通过改进的三位三通阀复位,隔离工作腔和真空腔实现助力保持。另外,还采用了堵塞设计,当人工制动时,堵塞在复位弹簧的作用下将工作腔管堵上,隔离工作腔和真空腔,实现助力保持,但是这种改进必须断开助力推杆和助力盘的连接,即主动制动时,机械踏板在复位弹簧的作用下一直处于复位状态。这种改进会带来另外一个问题,即主动制动过程中切换到人工制动时存在踏板踏空的现象。在实际工程设计时,需要在安全与踏空现象之间进行取舍。以上两种方式均可保证人工制动或者失效模式制动的有效性。

1.真空腔;2.工作腔;3.真空腔管;4.工作腔管;5.真空源;6.带自锁功能的三位三通电磁阀;7.大气管;8.助力推杆;9.液压主缸;10.油壶;11.霍尔位置传感器;12.液压压力传感器;13.堵塞;14.支撑轴;15.杠杆;16.复位弹簧
图3 改进的真空助力主动制动系统结构示意图
2.2 系统工作原理
通过对电磁阀两端A和B线圈以及自锁机构线圈的通断电控制实现对阀芯的位置控制和限位保持,进而对真空腔、工作腔和大气之间的连通进行控制。图4为带自锁机构的三位三通电磁阀的结构及4种工作状态示意图。当主动助力增加时,工作腔管与大气连通,与真空腔管隔离,电磁阀工作状态见图4(a)。当主动助力需要保持时,给电磁阀线圈A掉电,阀芯在A,B两端复位弹簧的作用下复位,此时真空腔和工作腔以及大气完全隔离,电磁阀工作状态见图4(b)。当主动助力需要减力时,先给自锁机构线圈通电,将磁芯销吸起,然后给电磁阀线圈B通电,阀芯向右置位,真空腔管和工作腔管接通,真空腔和工作腔压力差减小,助力减小,此时电磁阀的工作状态见图4(c)。如果减压时间较短,则自锁机构一直通电,如果减压时间较长,为了避免线圈B和自锁机构线圈发热烧坏,磁芯可以在自锁机构的作用下实现掉电位置保持,电磁阀工作状态见图4(d)。当车辆不进行主动制动或者制动结束时,给自锁机构线圈掉电,自锁机构锁死,然后给电磁线圈B掉电,阀芯被自锁机构锁死,无法在回位弹簧的作用下复位,以实现电磁阀和自锁机构均掉电的情况下真空腔和工作腔的连通,完全消除助力,电磁阀的状态示意图见图4(d)。制动踏板在复位弹簧的作用下复位。当系统再次进入主动制动模式时,首先给电磁阀线圈B通电,阀芯向右置位,然后给自锁机构线圈通电将磁芯销吸起,见图4(c)。再给线圈B掉电,然后给线圈A通电,阀芯向左置位,自锁机构掉电,此时电磁阀工作状态见图4(b),进入主动助力增加状态。当系统出现故障或者在人工制动干预的情况下,可以给自锁机构线圈通电,将自锁机构解锁并持续200 ms后,阀芯在A,B两端复位弹簧的作用下处于复位状态,此时真空腔和工作腔完全隔离,进入人工制动模式,工作原理和原车助力器工作原理相同,此时电磁阀的工作状态见图4(b)。同时,该方案在工作腔内设置了一个装置,包括堵塞、杠杆和支撑轴,当人工干预时,与推杆连接的助力盘盘肩对杠杆的压力取消,堵塞在复位弹簧的作用下将工作腔管堵上,保证了真空腔和工作腔的隔离。双重隔离冗余设计保证了人工制动的有效性和可靠性。当人工制动结束后,制动踏板在复位弹簧的作用下复位,助力盘盘肩作用于杠杆,将堵塞打开,此时真空腔和工作腔的连通可由三位三通电磁阀控制,系统进入真空助力主动制动模式。

图4 电磁阀结构及4种工作状态示意图
2.3 主动制动控制算法
针对制动管路液压压力控制,普遍通过控制增压和减压高速开关阀的开启时间,进而控制进入和流出双管路的制动液流量,达到调节管路压力的目的。通过在液压主缸或者轮缸上增压的液压力传感器进行压力反馈,由于油液具有弹性和滞后性,压力PID闭环控制很容易形成振荡[6],所以液压压力闭环控制过程复杂、不实用、响应慢。驾驶员在实际制动过程中并不关注主缸或者管路液压压力,而是通过控制车辆的制动减速度和目测与前方障碍物的相对距离不断调节踩踏制动踏板的力,控制车辆的制动减速度,从而实现最小跟车距离的控制。本文借鉴以上人工制动过程,将制动力控制过程与避撞或者跟车控制过程相结合,提出了基于减速度和最小跟车距离的双闭环制动控制算法。
假设Dr和vr分别为根据雷达和视觉检测前方障碍物的相对距离(m)和相对速度(m·s-1);ab_o和ta_o分别为本车(目标)制动减速度 (m·s-2)和响应时间(s);D为本车制动时与前车安全距离实时估计值(m);vb为本车实时车速(m·s-1);ab为本车制动减速度实时反馈值(m·s-2);PWM1为控制电磁阀开启时间的占空比;PWM2为控制泵电机运行时间的占空比。双闭环制动控制模型见图5。
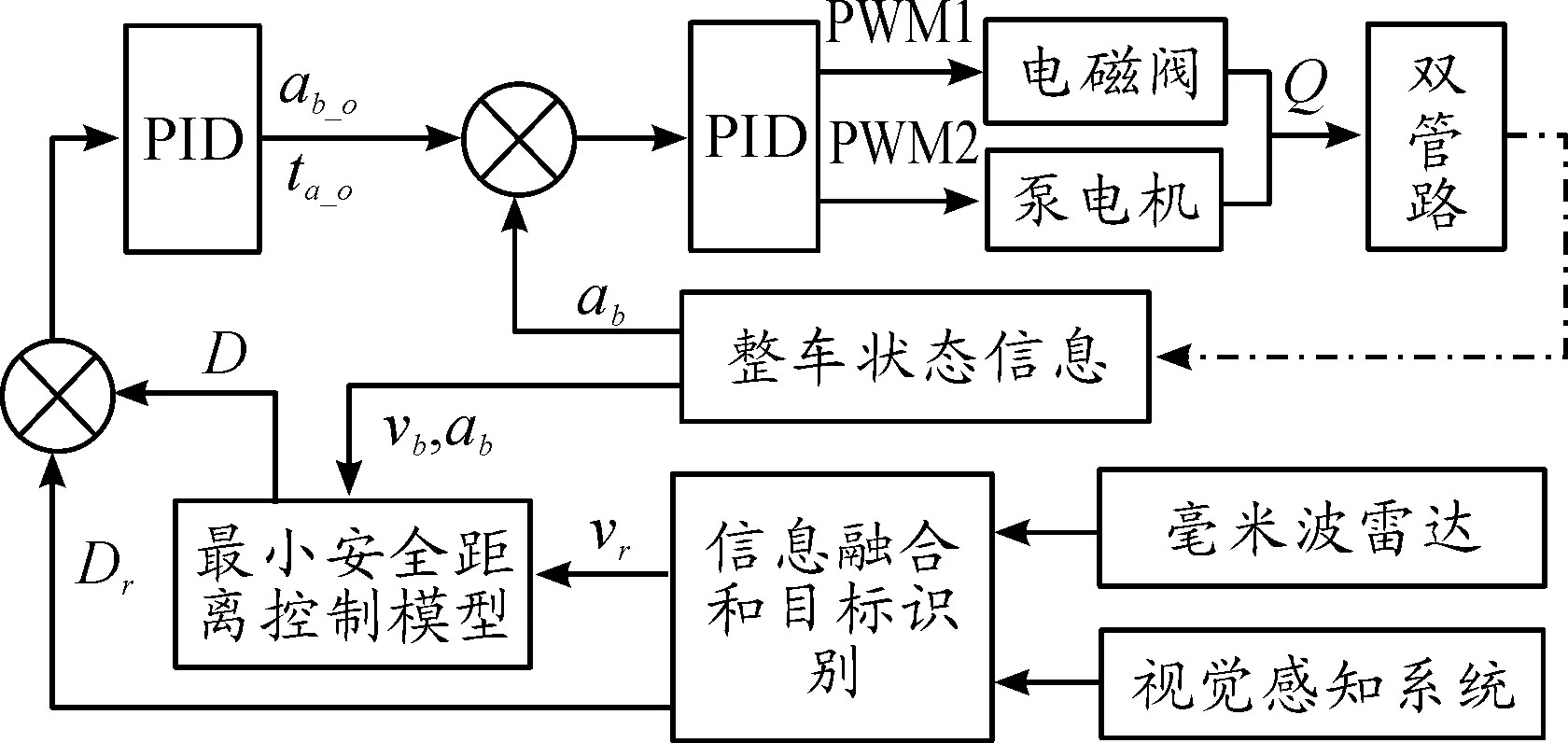
图5 基于距离和减速度的双闭环制动控制模型
双闭环外环控制实现最小安全跟车距离的闭环控制,其控制算法运行流程见图6。
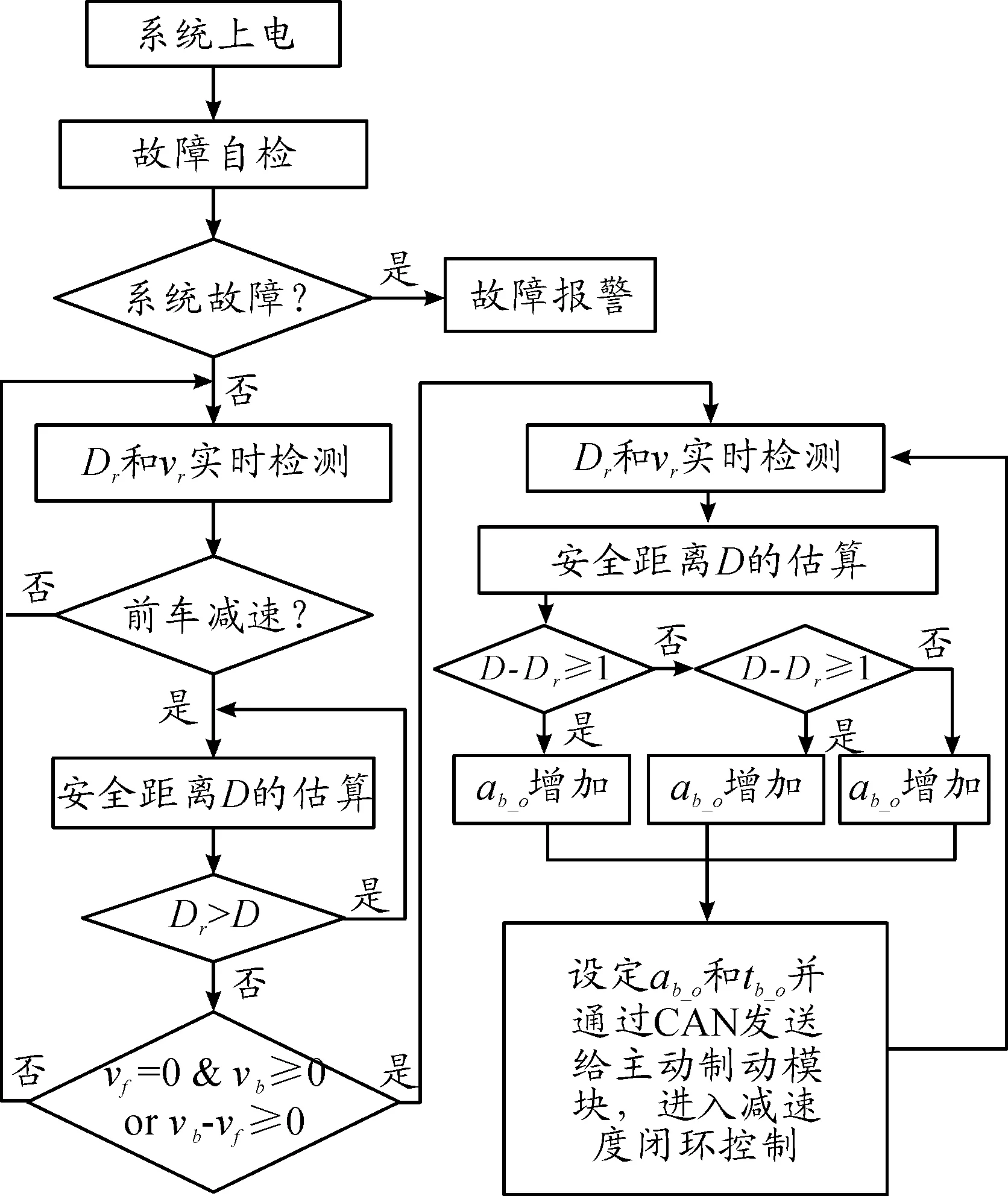
图6 最小安全跟车距离闭环控制算法流程
假设d为本车和前车最小安全跟车距离(m)。根据vr、vb和ab实时估计D,根据Dr与D的偏差,不断调整ab_o,实现最小安全跟车距离的精确控制。
前车静止工况下本车与前车最小安全跟车距离D的估计公式为
(6)
前车减速行驶工况下本车与前车最小安全跟车距离D的估计公式为

(7)
式中:t为雷达和视觉传感器检测周期(s);vf为前车车速(m·s-1);af为前车制动减速度 (m·s-2)。式(6)(7)中相关参数初始值的确定:ab,af取值范围为3.0~9.6 m·s-2,轿车的制动减速度典型值为5.6 m·s-2;卡车的制动减速度典型值为3.6 m·s-2,d的取值范围为1.00~2.00 m。af无法准确测量也无法控制,可以根据视觉感知系统进行初步判断后预设初值。ab可测量。本文提出的控制方法主要通过动态调节ab实现对最小跟车安全距离d的精确控制。
双闭环内环控制算法实现制动减速度闭环控制,其控制算法运行流程见图7。
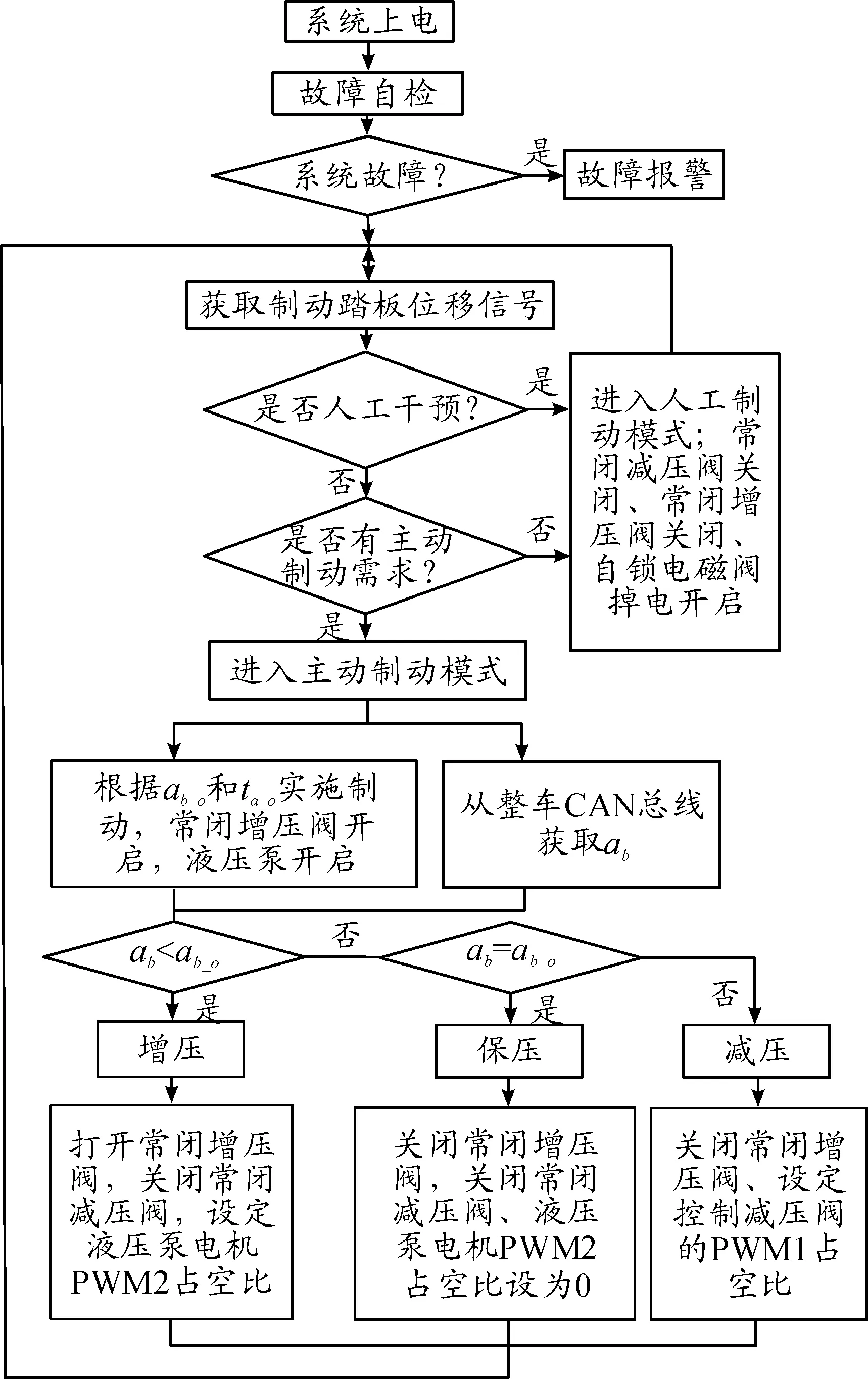
图7 制动减速度闭环控制算法流程
系统上电后,首先执行主动增压,通过液压传感器压力反馈值进行故障自检,然后通过捕获制动踏板位移或者开关信号判断是否进行了人工制动干预。如果人工干预,则进入人工制动模式;否则,循环等待直到上层发出主动制动请求,系统进入主动制动模式。根据上层感知系统和控制策略算法需要的目标制动减速度ab_o和响应时间ta_o进行减速度的PID闭环控制,根据ab与ab_o的偏差以及响应时间ta,不断调整控制电磁阀和电机的PWM1和PWM2,以调整电磁阀的开启时间和电机的转速/输出扭矩、双管路液压压力,实现减速度ab的精确控制。内环和外环控制算法可以集成在制动系统软硬件平台上运行,也可以分开在不同的平台上运行,之间通过CAN或者其他通信方式进行实时交互。本文将应用系统上层控制算法和本制动系统控制算法相结合,通过最直接的减速度和最小安全跟车距离的闭环控制进行集成融合,取代了复杂的制动管路液压压力闭环控制,降低了控制的复杂度,缩短了响应时间,也保证了制动平顺性和舒适性。同时,通过实时调节本车制动减速度调整与前车的最小安全跟车距离,克服行驶路况以及制动系统性能差异导致的制动干预距离估计偏大或偏小的问题,实现了最小跟车安全距离的精确控制,既保证了行车安全性,也提高了道路行车效率。
3 试验验证与分析
针对本文提出的基于双闭环的最小安全跟车距离控制算法开发的智能自动跟车系统,在前车静止和减速运行工况下进行了实际场景测试。兼顾行车安全和道路行车效率,在实际应用中,最小安全跟车距离d的理想值为1.00~2.00 m。当两车距离由远而近时,距离越近,相对车速越小,最小安全跟车距离控制更容易。
本系统通过视觉和雷达系统实时检测本车和前车的相对距离Dr,并实时调整本车的目标制动减速度ab_o,确保本车车速vb为0时和前车的最小安全跟车距离d保持在1~2 m。为了确保测试的安全性,在测试时将式(7)(8)中的d值设定为6.00~7.00 m,测量的d值减去5.00 m作为实际控制的最小安全跟车距离。本车与前车的最小安全跟车距离采用激光测距仪进行实时测量跟踪。为了保证制动舒适性,在正常行驶工况下,制动减速度不大于0.3g,从而保证驾乘舒适性。根据当前本车车速、前车车速以及本车一般不大于0.3g的减速度的情况设定本车与前车的目标安全距离。一般情况下ab≤0.3g。只有当紧急情况下,比如有行人突然切入前方车道或者其他车辆突然切入前方车道的情况下,为了保证行驶安全,允许本车减速度大于0.3g,从而尽可能缩短制动距离,避免碰撞事故的发生。
3.1 前车静止工况下测试与分析
在前车静止工况下,自主跟车系统在多次接近前方静止车辆的过程中,记录了20次(每个初始车速测试4次)测试过程的最小安全跟车距离d,测试数据见表1。从表1测试数据看,最小安全跟车距离控制精度高,具有很好的鲁棒性,不依赖于初始车速。最小安全跟车距离的控制不受初始车速的影响,克服了本车在不同车速下最小安全跟车距离偏大或者偏小的问题。
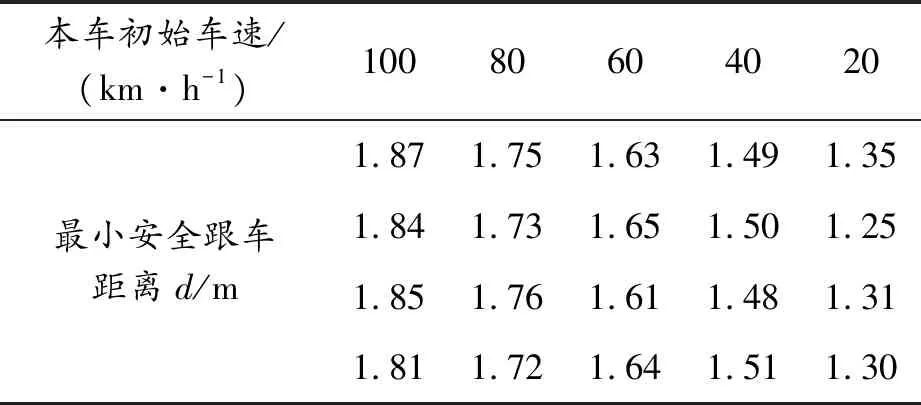
表1 前车静止工况下最小安全距离实测结果
3.2 前车减速运行工况下测试分析
在前车减速运行工况下,本自主跟车系统在多次接近前方减速车辆的过程中,记录了20次(每对初始车速测试4次)测试过程的最小安全跟车距离d的测试数据,见表2。前车在减速运行工况下,由于采用了最小安全跟车距离的闭环控制,所以克服了安全距离估算时前车制动减速度无法预知所带来的问题。从表2的测试数据看,在本车和前方车辆均处于减速运行工况下,本车和前车相对速度小于等于0时,最小安全跟车距离保持在1.00~2.00 m,表现出了较稳定的控制效果,克服了在本车和前车不同初始车速下最小安全跟车距离偏大或偏小的问题。利用常闭减压阀的掉电关闭功能,实现了不限时长的保压功能,满足了长时间制动和自动驻车的需求,解决了车辆无电子驻车制动时无法实现自动驻车的问题。
表2 前车运行工况下最小安全跟车距离实测结果

本车/前车初始车速/(km·h-1)100/8080/6060/4040/3020/10最小安全跟车距离d/m 1.951.841.771.691.461.911.851.791.641.361.891.811.751.681.451.921.871.781.661.43
另外,本文将主动制动系统和最小安全跟车距离闭环控制相结合,不仅保证了行车安全,提高了道路行车效率,也降低了制动系统控制的难度。车辆在制动减速过程中,表现出了较好的平顺性和舒适性,具有很好的实用性。
4 结束语
本文所提出的线控真空助力主动制动系统,克服了目前基于真空助力(包括电磁铁和电磁阀)的方案无法实现长时间通电保压的问题。通过采用目前现有的或者本文提出的带自锁功能的三位三通电磁阀能在掉电的情况下保持两种状态,实现方法简单、控制精度高。通过增加的位置霍尔传感器,将助力控制在可控范围,提高了系统的安全性。结合实际工程应用和人工踩踏制动踏板制动,设计了基于最小安全车距和减速度以及电磁阀PWM控制的双闭环控制方法。经过实际测试验证,本文所提出的线控真空助力主动制动系统以及控制方法不仅能满足长时间持续制动需求,而且能实现安全车距的稳定控制,保证了行车安全性,同时提高了道路行车效率,可以满足ADAS系统和智能车主动制动需求。
