采用改进模糊PID控制的串联机械手追踪误差研究
2019-06-13王东林
叶 丹,王东林
采用改进模糊PID控制的串联机械手追踪误差研究
*叶 丹1,王东林2
(1. 安徽文达信息工程学院机电工程学院,安徽,合肥 230012;2. 三一重机有限公司,江苏 昆山 215300)
针对串联机械手运动角位移跟踪误差较大问题,提出了改进模糊PID控制方法。创建串联机械手简图模型,给出机械手动力学方程式,设计了模糊PID控制系统。引用粒子群算法并对其进行改进,采用改进粒子群算法优化模糊PID控制器,将改进模糊PID控制器用于控制串联机械手角位移变化。采用Matlab软件对串联机械手角位移跟踪误差进行仿真验证,并且与传统PID控制器和模糊PID控制器仿真结果形成对比。仿真结果显示,串联机械手采用PID控制器和模糊PID控制器,其角位移跟踪误差较大,而采用改进模糊PID控制器,角位移跟踪误差较小。串联机械手采用改进模糊PID控制器,可以提高控制系统的稳定性,削弱机械手的抖动现象。
机械手;模糊PID控制;改进粒子群算法;角位移;误差
0 引言
机械手可以替代手工劳动,根据预先设置的轨迹进行运动,实现物体的搬运和装配工作[1]。由于机械手优于人类的劳动,使得许多企业采用机械手自动化生产线[2]。特别是在有危险的环境中工作,机械手的优势更加明显。因此,机械手在军事、医疗、航空及海洋等许多领域得到了广泛的应用。
串联机械手在执行高精度产品加工任务时,其角位移精度控制至关重要。为了降低串联机械手角位移运动产生的误差,研究者从多方面对机械手的控制方法展开研究。例如:文献[3]采用RBF神经网络控制机械手运动轨迹,创建了机械手动力学模型,引用了RBF神经网络控制器,采用李雅普诺夫函数对控制器的稳定性进行证明,通过仿真验证机械手运动轨迹误差,控制误差较小,具有较强的稳定性。文献[4]采用PID控制液压机械手运动路径,设计了液压机械手基本结构,引用PID控制液压缸运动位移,建立机械手运动控制仿真模型,通过控制曲线响应速度来验证控制效果,该控制方法可以获得良好的控制性能。文献[5]采用模糊PID控制机械手夹紧装置,设计了机械手送料循环图,引用了模糊PID控制器,通过模糊规则推理出最优控制参数,通过仿真验证机械手控制响应速度,提高了机械手定位精度。以往研究的机械手角位移追踪误差在一定程度上有所降低,但是,产品加工定位精度要求越来越高。对此,本文在模糊PID控制器基础上,采用改进粒子群算法优化模糊PID控制器,将优化后的控制器在串联机械手臂中进行验证。借助Matlab软件仿真串联机械手角位移跟踪效果。同时,与PID控制器和模糊PID控制器进行对比和分析。仿真曲线显示,机械手采用改进模糊PID控制器优于传统PID控制器和模糊PID控制器,其角位移跟踪精度较高,角位移运动相对稳定,能够执行高精度路径规划的任务。
1 串联机械手
串联机械手简图模型如图1所示。

图1 串联机械手
在图1中,1、2、3分别为机械手臂1、手臂2、手臂3长度,1、2、3分别为机械手臂1、手臂2、手臂3角位移,1、2、3分别为机械手臂1、手臂2、手臂3质量,g为重力加速度。
由拉格朗日定律可知,串联机械手动力学方程式[6]为:

式中:()为惯性矩阵;(,)为离心力和哥氏力组成矩阵;()为摩擦力矩阵;()为重力矩阵;τ为干扰矩阵;为控制力矩矩阵。
2 控制器设计
2.1 PID控制
PID控制器通过调节比例、积分、微分参数对控制系统进行在线控制[7],控制结构如图2所示。
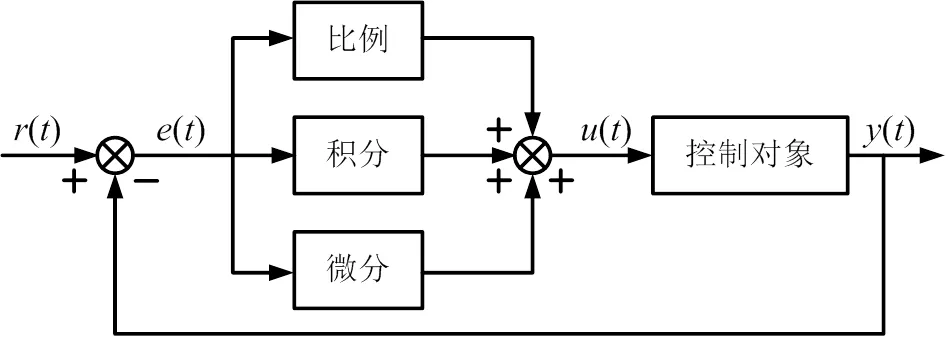
图2 PID控制结构
控制器输出的误差方程式为:

式中:()为输入值;()为输出值。
PID控制器在线控制方程式[8]为:

式中:p为比例系数;i为积分系数;d为微分系数。
2.2 模糊PID控制
模糊控制器包括模糊化处理、模糊推理和解模糊三个部分。首先,模糊化处理输入量。其次,模糊推理规则库中的经验知识。最后,解模糊化处理输出量。
PID控制调节参数计算方程式[9]为:

式中:p'、i'、d'为待整定值;Δp、Δi、Δd为整定值。
采用模糊PID控制串联机械手,其结构如图3所示。
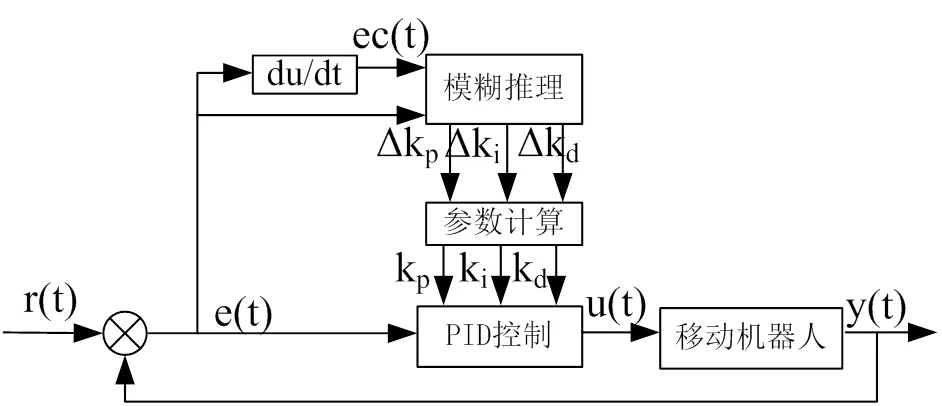
图3 模糊PID控制结构图
模糊控制器采用误差和误差变化率为输入量,输出量为p、i和d。输入量采用高斯函数,输出量采用三角形函数。
2.3 改进模糊PID控制
粒子群算法是一种群体智能优化算法,缩写为 PSO。具体描述如下:在维目标搜索区域中,将每个粒子对应于区域中的某点,假设群体由个粒子组成,则粒子坐标位置和速度向量为:


粒子通过迭代搜索到个体最优值为:

整个粒子群迭代搜索到群体最优值为:

粒子迭代的位置和速度[10]公式为:

=1,2,···,(10)
式中:为惯性权重值;1、2为随机数;1、2为学习因子。
为了提高粒子群算法的搜索能力,惯性权重值修改为:

式中:max为初始权重值;min为最终权重值;为当前迭代次数;max为最大迭代次数。
优化模糊PID控制器,需要建立综合性能评价目标函数,如下所示:
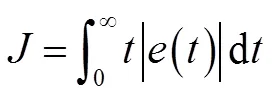
式中:为时间;()为误差。
采用改进粒子群算法优化模糊PID控制流程如图4所示。
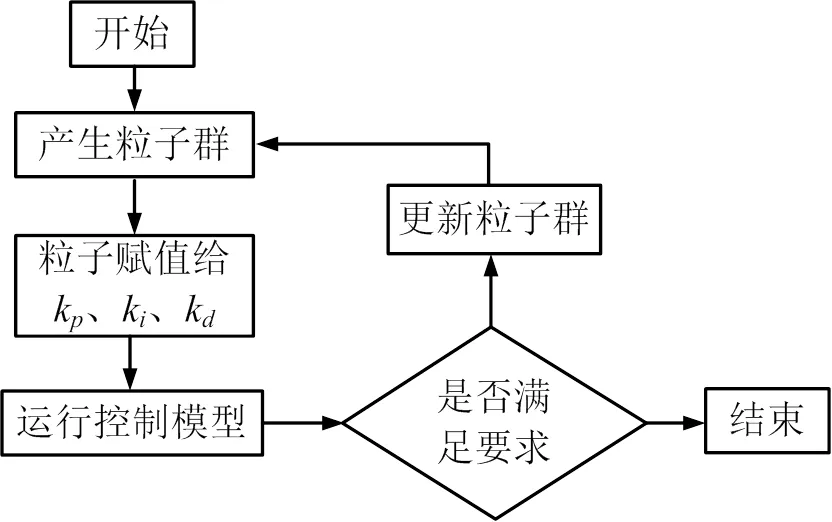
图4 改进模糊PID控制流程
3 误差仿真与分析
为了对比PID控制、模糊PID控制和改进模糊PID控制效果,在Matlab /Simulink环境下对串联机械手角位移跟踪误差进行仿真。仿真参数设置如下:初始种群为30,最大迭代次数为100,max0.9,min0.4,1=2=1.0;1=2=2.0。机械手臂1期望角位移为1=0.4cos(2π),初始角位移(0)=[0 0 0]T,控制参数=diag(30,30,30),机械手臂长度为1=2=3=1 m,机械手臂质量为1=2=3=1 kg,g=9.82 m/s2,=4s。采用PID控制、模糊PID控制和改进模糊PID控制的串联机械手臂1角位移跟踪结果分别如图5、图6和图7所示。
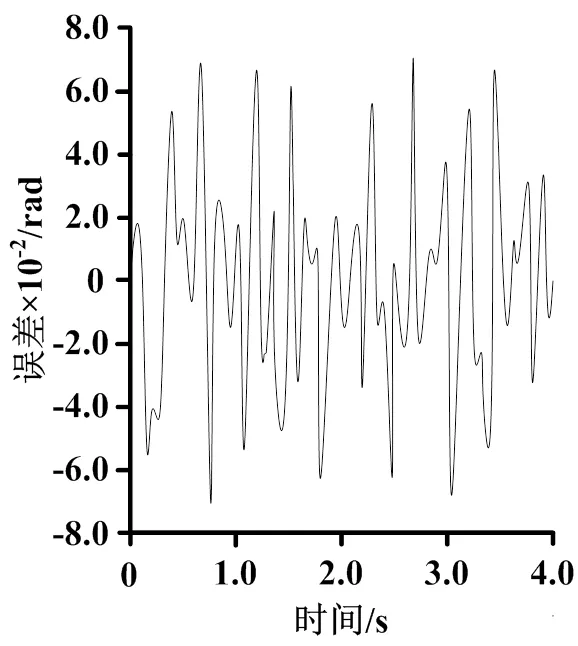
图5 PID控制误差

图6 模糊PID控制误差

图7 改进模糊PID控制误差
由图5可知,PID控制角位移跟踪误差最大,产生的最大误差为0.07rad;由图6可知,模糊PID控制角位移跟踪误差较小,产生的最大误差为0.025 rad;由图7可知,改进模糊PID控制角位移跟踪误差最小,产生的最大误差为0.008rad。另外,机械手运动轨迹整个追踪过程中,PID控制抖动幅度最大,模糊PID控制抖动幅度有所降低,而改进模糊PID控制抖动幅度最小。因此,采用改进模糊PID控制响应速度快,超调量较小,能够快速的适应复杂环境的变化,抑制系统的抖动性,从而提高串联机械手角位移跟踪精度。
4 结语
本文采用改进粒子群算法优化模糊PID控制器,并将优化后的控制器用于串联机械手角位移控制,主要结论如下:
1)相比较PID控制器和模糊PID控制器,改进模糊PID控制器适应环境能力强,能够在线调节PID控制器参数,控制系统相对稳定,输出误差最小。
2)粒子群算法搜索速度慢,容易陷入局部最优解,而改进粒子群算法能够快速的搜索到全局最优解,从而提高控制系统的输出精度。
3)采用MATLAB软件对改进模糊PID控制器进行仿真验证,能够观察串联机械手角位移跟踪效果,可以避免设计的不合理,从而节约成本。
[1] 关志杰. 注塑机专用机械手的设计与虚拟样机仿真[D].西安:陕西科技大学,2013.
[2] 徐成宇,高洪. 基于关节空间与工作空间协同的6R点焊机器人路径规划方法[J].井冈山大学学报:自然科学版, 2017,38(5):59-62.
[3] 龚发云,袁雷华,汤亮. SCARA机械手的RBF神经网络自适应轨迹跟踪控制[J].机床与液压,2014,42(3):41-45.
[4] 王勇,刘树林,张润忤. 管柱移运液压机械手的PID控制系统研究[J].工程控制计算机,2013,26(11):95-96.
[5] 沈玲. 机械手夹紧控制系统基于模糊PID控制的研究[J].内燃机与配件,2018(8):5-7.
[6] 付涛,王大镇,弓清忠,等. 改进神经网络自适应滑模控制的机器人轨迹跟踪控制[J].大连理工大学学报,2014, 54(5): 523-529.
[7] 吕红丽. Mamdani模糊控制系统的结构分析理论研究及其在暖通空调中的应用[D].济南:山东大学,2007.
[8] Kumar A,Kumar V.Evolving an interval type-2 fuzzy PID controller for the redundant robotic manipulator[J]. Expert Systems with Applications,2017, 73(5):161-177.
[9] Vineet K,Rana K P S.Nonlinear adaptive fractional order fuzzy PID control of a 2-link planar rigid manipulator with payload[J].Journal of the Franklin Institute,2017, 354(2):995-1018.
[10] 邓伟,宋景,黄昊旻,等. 基于动态权重SA-PSO的工艺路线决策[J].井冈山大学学报:自然科学版,2018,39(2):45 -49.
Research on Tracking Error of Series Manipulator Using Improved Fuzzy-PID Control
*YE Dan1,WANG Dong-lin2
(1School of Mechanical and Electrical Engineering, Anhui Wenda School of Information Engineering, Hefei Anhui 230012,China; 2. Sany Heavy Machinery Co., Ltd,Kunshan, Jiangsu 215300,China)
Aiming at the problem of large tracking error of angular displacement of serial manipulator, an improved fuzzy PID control method is proposed. A sketch model of the serial manipulator is created, a dynamic equation of the manipulator is given, and a fuzzy PID control system is designed. Particle swarm optimization (PSO) is used to optimize the fuzzy-PID controller. The improved fuzzy-PID controller is used to control the angular displacement change of serial manipulator. The angular displacement tracking error of serial manipulator is simulated and validated by using MATLAB software, and the simulation results are compared with those of traditional PID controller and fuzzy PID controller. The simulation results show that the angular displacement tracking error of the serial manipulator using the PID controller and the fuzzy PID controller is larger, while the angular displacement tracking error of the serial manipulator using the improved fuzzy PID controller is smaller. The improved fuzzy-PID controller can improve the stability of the control system and weaken the jitter of the manipulator.
manipulator; fuzzy PID control; improved particle swarm optimization algorithm; angular displacement; error
1674-8085(2019)03-0072-04
TP241
A
10.3969/j.issn.1674-8085.2019.03.013
2018-12-27;
2019-01-06
安徽省教学研究重点项目(2016jyxm0460);安徽省高校科学研究重点项目(KJ2017A650);安徽文达信息工程学院校级重点项目(XZR2017A03);安徽省高校科学研究重点项目(KJ2018A0614)
*叶 丹(1982-),女,安徽庐江人,讲师,硕士,主要从事控制理论与控制工程等方面的研究(E-mail ydan1982@163.com);
王东林(1983-),男,河南驻马店人,工程师,硕士,主要从事机械控制工程等方面的研究(E-mail:wangdonglin@163.com).