基于去调频接收技术的微波光子双波段线性调频连续波雷达
2019-06-13曹继明李若明杨继尧李王哲中国科学院电子学研究所北京100190
曹继明 李若明 杨继尧 孙 强 李王哲(中国科学院电子学研究所 北京 100190)
②(微波成像技术重点实验室 北京 100190)
③(中国科学院大学 北京 100049)
1 引言
雷达广泛用于目标成像、追踪以及目标识别等应用中[1,2]。脉冲压缩技术是雷达信号处理中常用的处理方法,它通过调制发射信号和对接收信号进行匹配滤波,从而化解发射信号功率与雷达对目标的距离分辨率之间的相互制约关系,而线性调频(Linear Frequency Modulation, LFM)信号是最基本且应用最广泛的脉冲压缩波形[3,4]。为了提高雷达的距离分辨率,需要发射更大带宽的LFM信号,但同时这也要求模数转换器(Analog to Digital Converters, ADC),射频混频器和信号处理器等器件具有对大带宽信号的处理能力[5]。去调频技术通过将雷达全部时域回波转换为距离相关的窄带中频信号,获得高分辨率图像的同时,极大地缓解了对ADC采样速率的要求[6]。由于实际场景对不同波段的电磁波反射特性不同,工作在多波段的雷达系统能够获得场景的更多信息,因此多波段雷达系统有助于目标识别性能的提升和雷达分辨率的提高[7,8]。但是,对于去调频处理而言,针对相同的观测目标,不同波段回波信号去调频得到的中频信号可能出现频率重叠,特别地,当双带的调频率相同时,双带回波去调频后的波形频谱完全重叠。因此,对于传统电学雷达系统,一般需要多个雷达接收系统对雷达在不同波段的回波信号进行接收,显而易见,这样会增大系统的体积和能耗等指标。
微波光子技术由于具有对大带宽信号的处理能力,近年来被引入到雷达系统中以提升现代雷达系统的性能[9—13],目前已开展了一些采用光子技术的多波段雷达系统和光子辅助多波段雷达信号接收系统的研究[14—16]。其中,意大利研究团队在发射端利用一个锁模激光器(Mode Locked Laser, MLL)实现光子变频技术,产生雷达发射波形,在接收端对雷达回波进行基于光采样的下变频处理,通过将雷达回波调制到MLL产生的光脉冲串,经过串并转换将高速串行采样光脉冲转换为并行低速脉冲,最后再用低速、高比特ADC进行并行时域交织采样[14]。然而,该方案接收机的带宽实质上受限于光串并转换器的带宽。为了同时接收具有大带宽的双波段雷达回波信号,去调频技术被引入到双波段雷达接收机中来缓解对ADC采样速率的要求。北京邮电大学研究团队在发射端使用正和负不同调频率的LFM信号作为双波段发射信号,接收机端利用光子I/Q混频器对双波段雷达信号进行去调频接收,从而得到频率分别为正和负的复中频信号[15]。然而,由于器件性能引起的I路和Q路信号幅度和相位的失配会降低该系统镜像抑制的性能,从而限制了对宽带信号的操作效果。
本文提出一种光子辅助双波段连续波雷达去调频接收方案,该双波段雷达接收机基于光子频率下变频器[17]。在发射机端,利用光子倍频技术产生宽带雷达发射信号,通过光延迟线将一个波段的发射LFM信号引入适当的时延,在接收端,利用光子辅助去调频技术同时接收双波段雷达的回波信号,从而可以通过低速ADC对双波段信号进行采样,且不同波段去调频得到的中频信号互不干扰。对于不同的探测场景,可以通过调节发射端延迟量的大小使不同波段去调频得到的中频信号位于不同的频率,从而可以使用同一套接收设备对不同波段的雷达回波进行同时接收。在接收机中,用一个双偏振正交相移键控(Dual− Polarization Quadrature Phase Shift Keying, DP−QPSK)调制器替代了文献[9]中的双偏振二进制相移键控(Dual−Polarization Binary Phase Shift Keying, DP−BPSK)调制器,其中DP−QPSK调制器包含2个分支,每个分支包含由2个子马赫曾德尔调制器(Mach−Zehnder Modulator,MZM)组成的QPSK调制器,在DP−QPSK调制器的输出端两个分支的光波通过偏振合束实现光波的偏振正交复用,双波段雷达系统的两对参考信号和回波信号通过4个子MZM调制到光载波上。通过调节直流偏置电压的大小,使4个子MZM工作在最小偏置点以压制光载波和其他偶阶光边带,选择参考信号和回波信号调制之后的1阶光边带进行光子辅助去调频处理,得到双波段雷达回波的去调频中频信号,再通过后续数字信号处理提取目标的信息。
2 结构与原理
提出的光子辅助去调频接收双波段雷达系统架构如图1所示,双波段雷达实验演示系统工作在C波段和Ku波段,该双波段雷达系统由双波段雷达发射机、两对天线和双波段雷达接收机组成。其中,接收机中使用的DP−QPSK调制器包含上下两条光路,每条路径分别对应一个偏振方向,且每条路径都包含一个由2个子MZM构成的QPSK调制器,如图1(b)所示。在系统中,分别使用X和Y代表两个正交的偏振方向,则双波段接收机中使用的DP−QPSK调制器的4个子MZM可分别表示为偏振方向为X的2个调制器XI和XQ以及偏振方向为Y的2个调制器YI和YQ。其中,C波段的雷达参考信号和回波信号通过调制器XI和调制器YI调制到光载波上,这两路调制后的光信号经偏振复用后输出,且这2个子调制器均工作在最小偏置点。相似地,来自Ku波段的雷达参考信号和回波信号通过调制器XQ和YQ调制到光载波上,这2个子调制器也工作在最小偏置点,调制后的光波经偏振复用后输出。与C波段不同的是,Ku波段的发射LFM信号,是由中频信号在光域倍频产生,且发射信号在倍频的同时在光域引入了延时。
在雷达发射机端,C波段发射机由任意波形发生器(通道−1),射频链路−1和功分器组成,Ku波段发射机由任意波形发生器(通道−2),中频链路,光子辅助倍频与延时器、射频链路−4和射频链路−5构成。在C波段雷达发射机端,任意波形发生器的通道−1产生一个C波段的LFM信号,该信号输入到由一系列放大器和带通滤波器构成的射频链路−1中进行功率放大,经过功率放大的C波段LFM信号被一个功分器分为两路。其中一路信号输入到C波段发射天线作为C波段雷达发射信号;另一路信号输入到调制器XI作为C波段参考信号。在Ku波段发射机端,双通道任意波形发生器的通道−2产生一个中频LFM信号,中频链路用来放大该中频LFM信号的功率,经过放大的中频信号输入到光子辅助倍频与延时模块,该模块的功能是同时产生一个中心频率和带宽相对于原始中频信号4倍频之后的雷达发射信号和参考信号,并且对其中的发射信号进行延时。该光子辅助倍频与延时模块结构如图1(d)所示,它由激光器、电光调制器、光耦合器、光纤和2个光电探测器构成,中频微波信号通过电光调制器调制到光载波上,其中电光调制器工作在最大偏置点,调制之后的光信号被光耦合器分为两路,其中一路经过光电探测器生成一个4倍频的参考信号,另一路经过一段光纤延时后再通过光电转换产生倍频之后的Ku波段雷达发射信号。而射频链路−4的功能是滤出4倍频之后的射频信号并将其功率进行放大,再输入到Ku波段传输天线作为发射信号。射频链路−5将Ku波段的参考信号放大之后,输入到调制器XQ。双波段的回波信号分别由相应的接收天线进行接收,其中,射频链路−2作用是将C波段回波信号进行功率放大,放大后的C波段回波输入到调制器YI;而Ku波段的回波经过射频链路−3放大后输入到调制器YQ。
双波段雷达接收机,由1个窄线宽激光器、DP−QPSK调制器、掺铒光纤放大器、双偏振光滤波器(Dual−Polarization Optical Band Pass Filter,DP−OBPF)、偏振解复用相干接收机和ADC组成。在双波段接收机中,窄线宽激光器产生的激光输入到DP−QPSK调制器,DP−QPSK调制器的结构如图1(b)所示,它的上下两条路径均由QPSK调制器构成,其中,一条路径上的光波偏振方向被旋转90°。上下两路的调制信号在DP−QPSK调制器输出端经偏振复用后输出。其中,DP−QPSK调制器的4个子MZM均工作在最小偏置点,调制信号偶阶光边带都被抑制。在DP−QPSK调制器的输出端,双波段雷达的光参考信号和相应的光回波信号经过偏振复用之后输入到掺铒光纤放大器中进行功率放大,放大之后的光信号输入到可调光滤波器,光滤波器同时滤出分布在两个偏振方向上的C波段和Ku波段回波和参考信号的正1阶光边带,经过滤波后正交偏振的光信号被耦合进入偏振解复用相干接收机中进行光电探测。相干接收机的输出中频信号由ADC采样后输入到数字信号处理器中计算得到目标的位置信息。值得注意的是,双波段雷达的光参考和光回波信号通过偏振复用的方式在相同的光路中进行传输,则可以认为外界环境对参考信号和回波信号传输路径的扰动是相似的,这两路信号的相位关系可认为保持不变,因此在相干接收机的输出端得到的是一个相位稳定的中频输出信号。
假设光延迟线对Ku波段引入的时延为τ0, C波段和Ku波段雷达发射LFM信号分别为STx_C和STx_Ku,则双波段雷达发射信号可表示为

其中,VC,VKu,ωC,ωKu,kC和kKu分别是双波段雷达发射信号的幅度、角频率和调频率。
雷达回波信号可以看作为发射LFM信号的延时,且回波信号幅度被目标的反射特性加权。这里假设在距离雷达为r处有一个点目标,则双波段雷达回波信号可以表示为

其中,fC(r)和fKu(r)分别为目标在C波段和Ku波段的反射率,τ=2r/c为回波的时延,c为光在空气中的传播速度。
激光器产生的光载波可记为A0exp(jω0t),调制C波段雷达参考信号和回波信号的2个子MZM工作在最小偏置点,在DP−QPSK调制器的输出端,C波段的调制信号可记为
其中,A0为调制信号的幅度值,且其和输入光载波功率P0之间满足关系式P0=|A0|2/2,ω0为光载波的角频率,J1(x)是1阶第1类贝塞尔函数,和分别为C波段参考信号和回波信号的调制系数,且和随后可调光滤波器滤出的C波段的调制信号正1阶光边带可表示为
其中,g为掺铒光纤放大器的线性增益。所滤出的两个光边带在偏振解复用相干接收机中进行平衡探测,接收机的2个光电探测器所产生的带内光电流可记为
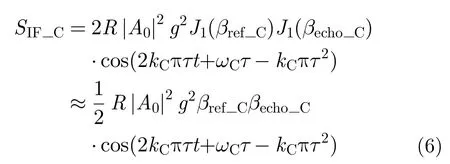
式中,n=1, 2,R为光电探测器的响应度,则在相干接收机的输出端,由C波段雷达回波信号产生的去调频中频信号可表示为
同样地,用于调制Ku波段雷达参考信号和回波信号的2个子MZM工作在最小偏置点,则在DP−QPSK调制器的输出端,Ku波段的调制信号可表示为
同理可以得到,Ku波段雷达回波信号产生的去调频中频信号可表示为
由式(6)和式(8)可知,C波段和Ku波段去调频得到的中频信号的频率分别是kCτ和kKu(τ+τ0),它们都是一个与目标距离相关的频率,因此可以通过进一步的数字信号处理恢复得到目标的位置信息。这里首先将Ku波段的发射信号加上一个延时量τ0,通过调节延时量的大小,能够使得Ku波段和C波段去调频后得到的中频信号在频域上分离,从而避免相互干扰,因此能用同一套雷达接收机接收双带雷达回波信号。
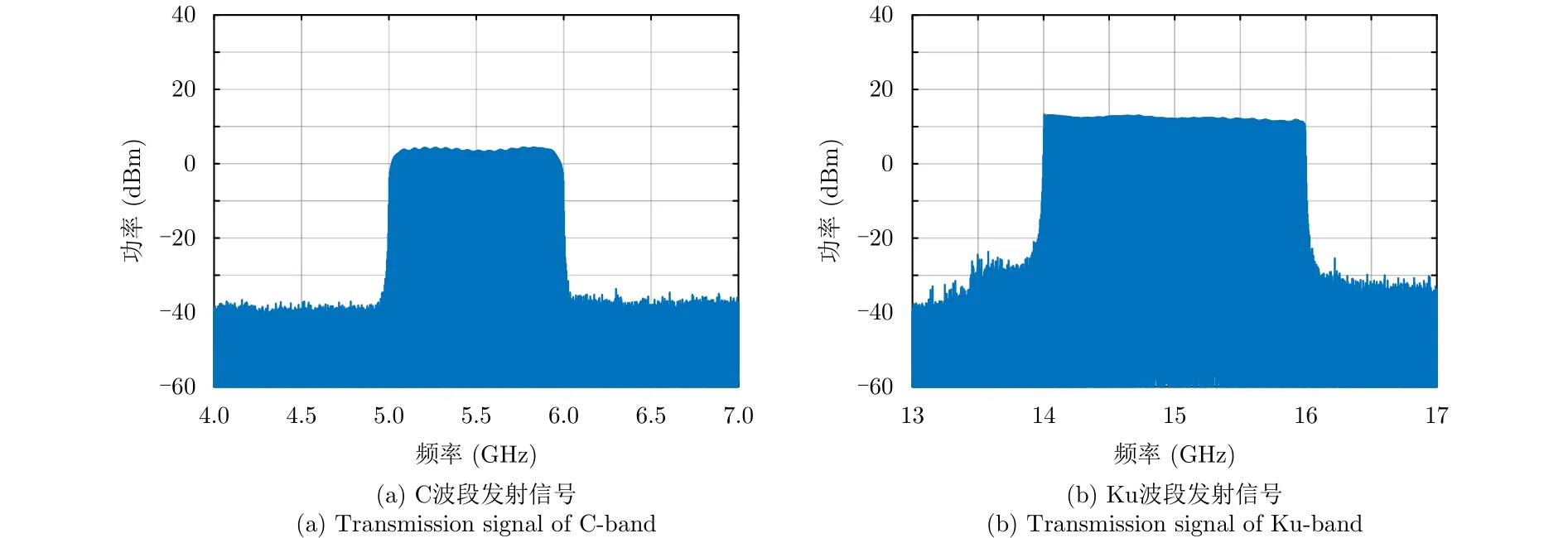
图2 双波段发射线性调频信号的频谱Fig.2 The spectrum of transmitted signals
3 实验结果与分析
接着本文对微波光子双波段雷达进行了实验验证。C波段LFM信号由任意波形发生器(Keysight M8190A)的通道−1直接产生,它是一个中心频率为5.5 GHz,带宽为1 GHz,脉冲重复周期为50 μs的LFM连续波信号。Ku波段发射LFM信号由一个中频LFM信号在光域倍频产生,该中频LFM信号由任意波形发生器通道−2产生,它是一个中心频率为3.75 GHz,带宽为0.5 GHz,脉冲重复周期为50 μs的LFM连续波信号。该中频信号输入到光子辅助倍频与延时器,产生的Ku波段LFM信号脉冲重复周期与倍频前的中频LFM信号一致,其中心频率为15 GHz,带宽为2 GHz,实验中,光子倍频与延时模块中使用的延时光纤长度为150 m,延时后的发射信号经过放大后输入到Ku波段发射天线,射频链路−4的增益系数为35 dB。按照雷达距离分辨率计算公式c/2B,其中B为雷达发射信号带宽,C波段和Ku波段的理论距离分辨率分别为15.0 cm和7.5 cm。实验中,C波段信号发射功率为8.6 dBm,Ku波段的发射功率为15.8 dBm,发射LFM信号频率谱如图2所示。在接收机端,接收机由激光器,DP−QPSK调制器,放大器,滤波器和偏振解复用相干接收机(discovery semiconductors)构成。采用的窄线宽激光器(teraxion)的波长为1550.14 nm,功率为17.6 dBm。来自于激光器的光波被输入到DP−QPSK调制器(Fujitsu FTM7977HQA)中作为光载波。在实验中,DP−QPSK调制器的4个子MZM都工作在最小偏置点。光滤波器用来滤出双波段雷达光参考信号和光回波信号的正1阶光边带,图3所示为C波段和Ku波段调制信号以及经过光滤波器后的光谱,需要注意的是每一条光谱曲线都是两个偏振方向光波的叠加。滤波后的调制信号输入到偏振解复用相干接收机中进行光子辅助去调频处理。其中,偏振解复用相干接收机是一个由偏振波束分束器,平衡探测器和光路匹配的3 dB耦合器构成的集成模块单元。相干接收机输出的去调频中频信号由采样速率为100 MSa/s的ADC采集记录,量化后的信号输入到数字信号处理器中进行信号处理以恢复目标的距离和多普勒频率等信息。其中雷达接收机混频器的变频增益为—22 dB,混频器噪声系数约为33 dB。
为了验证所提出的光子辅助双波段雷达系统,本文采用一对边长为15 cm的三面角反射器作为目标,对系统进行了一系列的转台成像实验。实验中,C波段收发天线之间距离约为1.05 m,Ku波段天线之间的距离约为1 m,目标至天线中心的距离约为7.5 m,并且转台的旋转平面与波束远场等相位面垂直。首先,将两个角反射器在距离向摆放相差约为35 cm,对这两个角反射器进行距离测量。相干接收机输出的C波段和Ku波段去调频中频信号频谱如图4所示,可以看到,在C波段和Ku波段均能观察到对应于两个目标的两个频率峰值。在C波段两个频率峰相差43 kHz,对应于测量距离32.25 cm,而在Ku波段两个频率峰相差92 kHz,对应于距离测量结果为34.5 cm。随后,将两个角反射器放置在转台上进行动目标成像实验,转台转速为(/9) rad/s,两个角反射器的初始位置为距离向相差45 cm,方位向相差50 cm,成像积分时间为0.4 s。双波段雷达成像结果如图5所示,C波段成像结果表明两目标在方位向和距离向测量距离分别为46.4 cm和48.8 cm,而在Ku波段的测量结果分别为42.3 cm和48.3 cm,成像结果表明双波段雷达在C波段和Ku波段都能够正确地恢复目标的位置信息。本文所提出的光子辅助双波段雷达系统适合对目标跟踪时进行高分辨率成像。
4 结论
本文提出并验证了一种新的光子辅助双波段去调频雷达系统方案,综合分析了该方案的工作原理,并对提出的系统进行了实验验证。所提出的光子辅助双波段雷达系统,共享一套接收机硬件,能够在C波段和Ku波段同时独立工作,为减小双带雷达的体积,重量和功耗提供了一套有效方案。本工作展示了微波光子技术在多波段雷达系统中的潜力。
