基于微波光子学的分布式相参孔径雷达
2019-06-13李尚远肖雪迪郑小平
李尚远 肖雪迪 郑小平
(清华大学电子工程系,北京信息科学与技术国家研究中心 北京 100084)
1 引言
近年来,提高雷达威力、分辨力、生存性等性能,是应对诸如弹道导弹、无人机、蛙人、小艇等低雷达截面积、小尺度的高机动或慢速目标威胁的主要手段。采用分布式阵列、以多部雷达信号相参的方式对上述目标进行探测、识别和高精度成像,可有效提升对目标的信息获取能力和识别率。由此形成了一种重要的新体制雷达架构,即分布式相参孔径雷达(Distributed Coherent Aperture Radar,DCAR)。
DCAR是指利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统[1—6]。它由N部单元雷达和1个中心控制处理系统组成,通过对空间分布的多个单元雷达小孔径进行信号相干合成,可获得等效大孔径的性能,如图1所示[6]。各天线孔径在统一的控制下,对雷达发射波形进行时间和相位控制,使各孔径发射信号在目标处干涉叠加达到极大,获得最大的发射相参增益;同时各接收机在统一的时钟支持下,相参接收目标反射到各个孔径的回波,获得最大的接收相参增益。N个全同天线孔径进行相参合成时,理论上可以达到目标回波信噪比改善N3的效果[5,6]。在实现远距离目标搜索和高精度目标识别的同时,多个同样配置的分布式孔径,还带来了潜在的单孔径成本低、系统生存性高、可维护性强、灵活可扩展等诸多优点,受到了国内外研究者的关注。而采用高频宽带信号对目标进行高精度成像,是DCAR的重要发展趋势。
图1 分布式相参孔径雷达原理图[6]Fig.1 Schematic diagram of the Distributed Coherent Aperture Radar[6]
如果进一步赋予DCAR对目标进行雷达成像的能力、实现分布式相参孔径成像雷达(Distributed Coherent Aperture Imaging Radar, DCAIR),那么将为目标探测、识别提供更为丰富的细节特征和依据,可以使DCAIR更有效地应对低雷达截面积、小尺度的高机动或慢速目标威胁,提高目标探测和识别精度。可以说,实现DCAR是实现DCAIR的基础,只有在优异的DCAR基础上,再结合针对成像的波形、控制、算法等技术支撑,才能实现DCAIR。
本文将首先介绍DCAR的概况、基本原理和国内外发展情况;然后结合DCAR的关键技术,阐述微波光子技术与DCAR相融合的途径;最后介绍清华大学在基于微波光子学的DCAR方面的工作。
2 分布式相参孔径雷达概况
2.1 发展历程
DCAR最早由美国麻省理工学院林肯实验室于2003年提出,旨在实现高精度目标成像,解决地基、海基反导雷达系统移动性差、生存能力弱和效费比低等问题[1]。2005年,在白沙导弹靶场利用2部工作于X波段、带宽500 MHz的AN/MPS−36雷达构成了分布式相参系统,实验获得了9 dB的信噪比增益[1],成功验证了DCAR的可行性。
2008年,林肯实验室用前述X波段雷达和2 GHz带宽的Ku波段雷达进行了稀疏分布相参成像雷达的实验[7];2014年,研制成功了W波段、带宽8 GHz的HUSIR雷达[8]。仿真研究表明,该雷达能够在没有其它信息的支持下,清晰地辨认出小尺度的太空目标。林肯实验室计划将该雷达加入到由X/Ku波段雷达组成的稀疏DCAR中,构建X/Ku/W波段单元雷达组成的、性能更强大的DCAR,实现对空中目标的尺寸、形状、姿态、运动状态的识别,并区分出复杂目标中的精细结构[8]。
中国也有很多单位开展了DCAR的探索研究:
(1) 在DCAR原理验证方面,2011年起,北京无线电测量研究所进行了C波段两单元雷达线馈、空馈实验[4,5,9],其中空馈实验中,接收相参时实现信噪比增益5.7 dB,收发全相参时信噪比增益约8.5 dB[9],在国内率先验证了分布式相参合成原理的可行性;后针对民航飞机等运动目标开展P波段、X波段两单元雷达相参合成试验[10—13],在X波段发射相参时的回波幅度改善为5.76 dB,收发相参时回波幅度改善均值为11.82 dB,相参合成跟踪距离比单元雷达有明显提升[12,13]。北京理工大学研究基于步进频信号的相参合成算法[3,14—16],搭建Ka波段(带宽512 MHz)的两单元DCAR试验系统,针对角反和二面反射镜目标,分别开展暗室和外场试验,在收发全相参时实现了信噪比增益7.4 dB、合成效率68.2%的结果[17]。
(2) 在DCAR的关键技术研究中,北京理工大学等单位开展了时间与相位同步方面的研究[18—21]。清华大学、国防科技大学、北京理工大学、西安电子科技大学在DCAR的相参参数估计算法、几何布置、相参合成效果的影响因素、相参合成性能监控等关键问题上也开展了广泛研究[22—31]。
2.2 DCAR的基本工作原理
一般来说,DCAR由中心控制处理系统和多部单元雷达构成。每部单元雷达既可独立进行搜索、检测、跟踪和识别工作;也可在统一控制之下,与其他雷达协同工作,实现多部雷达间的相参合成,完成对目标的相参跟踪、成像和识别等任务[9]。
DCAR的工作可分为3个模式:独立工作模式、接收相参模式、全相参模式[5,6]。
(1) 独立工作模式:在该模式下,各单元雷达独立工作,可执行搜索、捕获任务,也可对目标进行初步的跟踪和识别。该模式下,雷达一般发射窄带波形。
(2) 接收相参模式:该模式的主要任务是实现对目标的跟踪,并为全相参模式获取相参参数。各雷达工作在接收相参下,采用时分、频分或者码分等方式发射窄带或宽带的正交波形,以区分各单元雷达信号的回波。其中,发射正交编码的波形是最常用的方法:各雷达单元发射相互正交的波形,接收本雷达发射信号的回波、并同时接收其他所有单元雷达的回波,进而通过对所有回波的处理,获得各回波的延时和相位等参数。这些参数为全相参提供必要的相参参数,其准确性是收发波形全相参的保证。此时,N部雷达可以获得N2的信噪比增益。
(3) 全相参模式:在目标锁定、相参参数测量完成后,DCAR进入全相参模式,各单元雷达发射相同的波形,并根据相参参数调整各自的延时和相位,使各信号同时到达目标,实现发射相参。此时各路信号同相叠加,信噪比将进一步提升N倍,相比单部雷达获得N3的信噪比增益。在全相参模式下,目标跟踪全部由中心控制处理系统实现,并在相参跟踪的同时,动态监控和调整相参参数,保证跟踪全过程的相参性。
2.3 DCAR的优势
DCAR与具有相同功率−孔径积的单天线雷达或相控阵雷达相比,具有相同的探测威力。而最明显的差异,是DCAR各单元雷达“分布式”的特征:系统由多部小孔径的单元雷达组成,各子孔径空间分散,可以为整个雷达系统带来诸多优势[1—8,12],包括:
在雷达性能方面:(1)一般采用稀疏布阵,形成的虚拟孔径大、波束窄,角分辨率高;(2)小孔径雷达波束宽、跟踪指向精度要求低,易于实现大扫描范围;(3)孔径到目标路径不同,有抗大气扰动的能力。
在应用领域方面:(1)单元雷达的体积小、重量轻、功耗低,可运输、机动灵活,战场生存性强;(2)可根据探测目标的情况,灵活配置布阵方式、阵列规模,实现功能扩展和威力扩展;(3)可根据任务需求,灵活实现通信、雷达探测等多种功能。
在工程实现与维护方面:(1)各子孔径可采用同样的设计、批量生产,设计难度低、制造容差大,可降低系统的单位功率孔径积的成本;(2)多部小孔径雷达配置相同、复杂度低,维修保障简单、效率高,系统鲁棒性强、可用性好。
2.4 DCAR的关键技术
由DCAR的原理和工作过程可以看到,实现全相参合成的核心,一是保证各单元雷达发射信号到达目标的相参性和接收处理过程的相参性;二是收发系统要根据雷达工作模式的不同,在可控的时刻、以可控的频率和相位、产生并处理可变带宽和可变波形的信号。
而要进一步实现目标的成像探测、为目标识别提供更为丰富的细节特征和依据,则需要雷达具备更优异的方位向和距离向分辨率、具备相参合成孔径的探测能力等,这就需要雷达具有更高的载频和更大的带宽。
其中的关键技术包括:(1)高精度时频分配和同步;(2)分布式相参阵列的设计与布阵;(3)高频、宽带正交波形的设计与相参产生;(4)相参参数的快速估计;(5)高频宽带信号的阵列相参接收[9]。
3 微波光子学与DCAR的融合途径
3.1 微波光子学
微波光子学利用光电子器件组成系统来产生、分配、控制以及处理宽带微波毫米波信号。由于光波频率是微波频率的103倍以上,宽带电信号在光频段属于窄带信号,利用成熟的信号处理理论可以很方便地在光域对微波信号进行处理;其次,光子器件具有优异的宽带特性和强大的并行处理能力,可以较方便地实现宽带雷达信号的产生、真延时和高速采样;同时,光纤的低损耗特性和宽带信号传输能力,也使其成为相参时频同步分配网唯一可行的方案[32,33]。
3.2 微波光子雷达
微波光子技术与雷达的结合早已有之,在20世纪,微波光子技术主要解决雷达中的信号远程传输问题。而微波光子学与雷达的深度结合则始于2014年:在欧洲研究院PHODIR、PREPARE、意大利国防部SOPHIA等项目资助下,文献[34]在Nature杂志上报导了国际上第1个采用了微波光子器件的雷达:它利用光学上变频和光子辅助模数转换器(Analog−to−Digital Converter, ADC)产生和采样载频10 GHz和40 GHz、带宽13 MHz的雷达信号,对距离5.5 km外的运动目标进行2维成像,得到150 m的距离分辨率和2 km/h的速度分辨率,该成果首次证明了微波光子单元技术在雷达中应用的可行性。
此后,国内研究者也开展研究,提出很多微波光子雷达方案[35,36],并在多年研究积累上,充分发挥微波光子技术大带宽的优势,研制出多种高分辨率成像雷达。2017年5月,清华大学在激光与光电子会议(Conference on Lasers and Electro−Optics,CLEO)上,报道了基于微波光子宽带信号产生的微波光子ISAR成像雷达,获得了优于0.05 m的成像分辨率[37]。同年,中国科学院电子学研究所、南京航空航天大学分别报道了基于微波光子技术的SAR和ISAR成像雷达[38,39]。2018年,清华大学、南京航空航天大学、武汉某研究单位等又先后发表了采用微波光子技术的W波段超宽带成像雷达、MIMO雷达、以及Ka波段超宽带成像雷达等研究成果,验证了微波光子学雷达系统的可行性和高分辨率的优势[40—42]。
3.3 微波光子技术应用于DCAR的途径
微波光子学的研究表明,微波光子技术可以实现数十km范围内、优于ps级的传输时间稳定性[43];可以实现带宽10 GHz以上、数十GHz载频下的宽带微波信号产生[40];可以实现宽带微波毫米波信号的变频、滤波等信号处理[44];可以实现频率、延时等诸多信号参数的全光测量[45]。这些单元技术与DCAR的关键技术匹配,是有可能加以运用的。
然而必须要注意到,微波光子单元技术往往以电信号为输入输出接口,单独运用时,其损耗等特性还可以控制在合理的水平。但在实现复杂的系统功能时,各功能模块级联,性能迅速恶化。如何在DCAR中,通过原理的突破和全新的设计,将各单元技术以更高效的方式组合成有机的整体,将是“微波光子”和“分布式相参孔径雷达”结合过程中面临的最主要的挑战。
为此,需要开展微波光子单元技术的功能集成的研究,即在各功能模块级联时,省去其中的光/电、电/光转换过程,降低这些过程引入的损耗,保证微波光子单元技术与DCAR相结合时的性能,例如:高频宽带雷达信号产生与滤波技术的功能集成、下变频与滤波技术的功能集成,将降低雷达信号产生和接收过程的损耗,在保证波形信噪比的同时,发挥微波光子技术在高频、宽带方面的优势。
3.4 我国开展基于微波光子学的DCAR研究的情况
2017年起,清华大学联合中国科学院电子学研究所、北京大学、北京邮电大学、上海交通大学等单位,联合承担了国家自然科学基金重大项目“面向高频宽带分布式相参成像雷达的微波光子学基础研究”,瞄准核心科学问题、突破微波光子关键技术,开展系统功能集成、宽带多通道雷达波形产生、高精度时频分配、高精度光控波束形成、低噪声高频宽带光采样等单元技术研究,并建立基于微波光子学的分布式相参成像雷达实验平台。
2018年底,清华大学首次实验验证了采用微波光子技术的DCAR系统,在两通道收发全相参的工作模式下,获得8.3 dB的信噪比增益,接近理论的9 dB结果,本文将重点介绍这一工作[46]。未来,还将进一步与雷达成像相结合,开展DCAIR中的微波光子技术研究,提升DCAIR在探测威力、分辨力、灵活性等多方面的性能。
4 基于微波光子学原理的DCAR
4.1 系统总体架构
基于微波光子学原理的DCAR,是指利用微波光子学功能模块实现传统雷达各项功能、实现分布式相参孔径合成的雷达,其基本功能模块与信号处理流程与基于电子学技术的传统雷达完全相同,布阵方式、信号处理算法也没有区别,差异主要体现在单元模块的实现方法和模块间接口上。
图2为基于微波光子学原理的DCAR总体架构,主要由中心控制处理系统和单元雷达构成。中心控制处理系统包括频率参考、时间基准、中心信号处理等部分;各单元雷达采用相同的设计,单元雷达内部包括单元控制处理核心(包括单元信号处理、频率和时间管理等)、微波光子发射机、微波光子接收机、射频收发前端和天线。
在具体实现上,目前除了信号处理、射频收发前端和天线外,其他所有模块既可以全部采用微波光子技术实现(此时各模块之间的连接为光纤而不是电缆);也可部分采用微波光子技术、部分保留传统的电子学技术,并对接口做相应的调整。
在整体系统中,尽管功能上较为严格地划分了“中心控制处理系统”和“单元雷达”,但在具体实现时,由于各模块采用光纤作为连接,因此可以根据具体应用场景,灵活地将各单元雷达的某些模块放在中心控制处理系统、甚至在单元雷达处仅保留光−射频转换模块和射频部分。
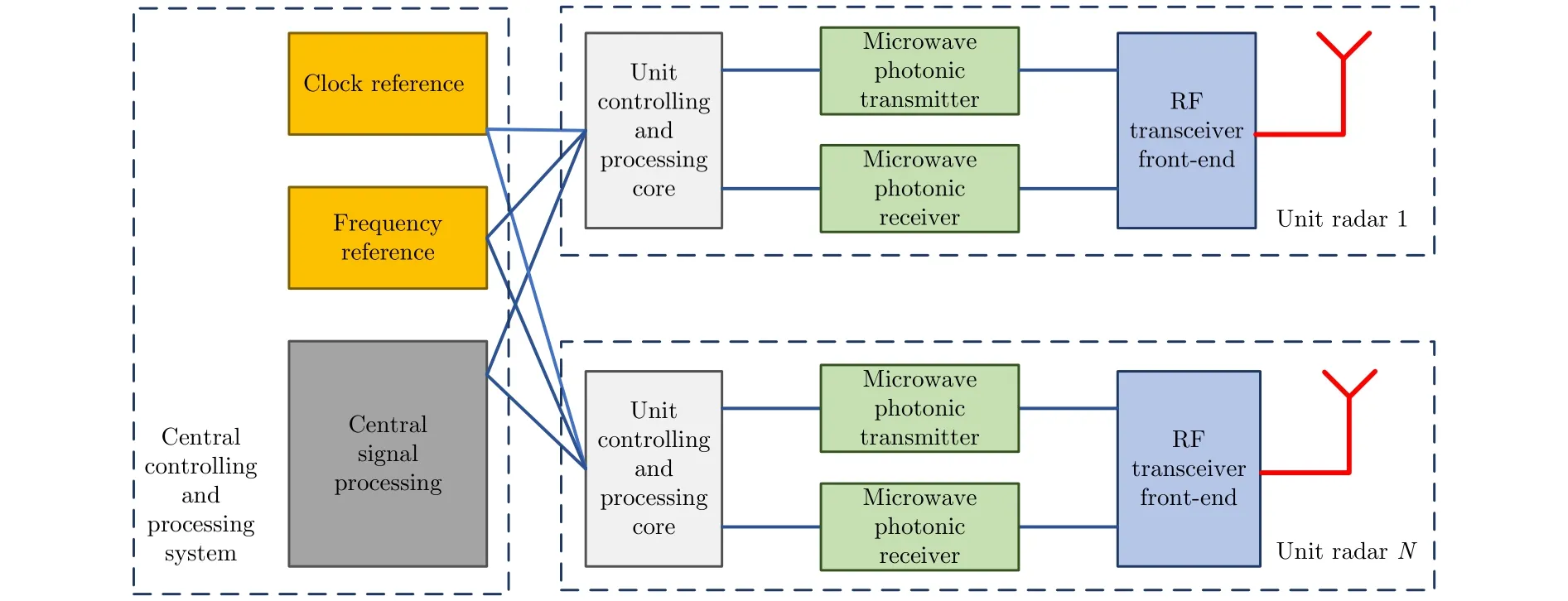
图2 基于微波光子学原理的DCAR总体架构Fig.2 The overall framework of the microwave photonics−based DCAR
4.2 实验系统结构
(1) 总体结构。
为验证基于微波光子学的DCAR能否提升信噪比、提升多少dB这一关键参数,结合DCAR的关键技术,本文选择利用微波光子学实现图2所示系统中的“微波光子发射机”,并用光纤连接“中心控制处理系统”和“单元雷达”,其它模块仍采用传统技术实现。
本文提出了如图3所示的基于光子学的宽带DCAR系统,由中心控制处理系统、基于光纤的时间同步网络和N个单元收发机组成。在中心控制处理系统,1个可重构多通道光任意波形发生器(Reconfigurable Multi−channel Optical Arbitrary Waveform Generator,RMOAWG)由1个光子数模转换器(Photonic Digital−to−Analog Converter, PDAC)和N个相位编码模块组成,其中光子数模转换器用来产生光载线性调频波(Linear Frequency Modulation Wave, LFMW)并通过光耦合器(Optical Coupler, OC)分成N路,分别经过相位编码模块进行相位编码或不编码,从而产生N通道的光载相位编码线性调频波(Phase−Coded Linear Frequency Modulation Wave,PCLFMW)或LFMW。N通道的光信号经过时间同步网络,通过可调光延时线(Variable Optical Delay Line, VODL)调整发射时间,并通过光纤传到远端收发机,通过光/射频转换模块(Optical/RF, O/R)转换为微波PCLFMW或LFMW,并通过天线发射出去。接收回波经过射频/光转换模块(RF/Optical,R/O)转换到光域并通过光纤回传到中心控制处理系统,再经过O/R转换模块转换到射频域,经过模数转换,并进行数字信号处理。
(2) 宽带正交波形产生。

图3 基于光子学的宽带DCAR系统Fig.3 Schematic diagram of the photonic−based wideband DCAR system
其中相位编码模块由如图4所示的双输出调制器(Dual−Output Mach−Zehnder Modulator,DOMZM)+平衡探测器(Balanced Photodetector,BPD)实现,输入光载LFMW经过DOMZM调制编码序列,再经过平衡探测产生脉内相位编码的LFMW。根据DOMZM的原理,当偏置在正交点、且编码序列打开时,经过BPD可得到PCLFMW,在1个脉冲宽度内,其相位在0和之间跳变[47]。通过设计编码序列,可使N部雷达产生的PCLFMW正交。
4.3 实验结果
在暗室环境下,本文用所提宽带DCAR系统开展空馈实验,对两单元X−波段DCAR系统进行原理验证。采用金属球作为探测目标,每部雷达中,产生的宽带雷达波形通过喇叭天线发射;接收回波用另一个喇叭天线接收,用数字信号示波器(DSO81204B,带宽12 GHz)采集回波并进行数字信号处理。
(1) 正交波形产生。

图4 相位编码模块Fig.4 Configuration of the phase coding module
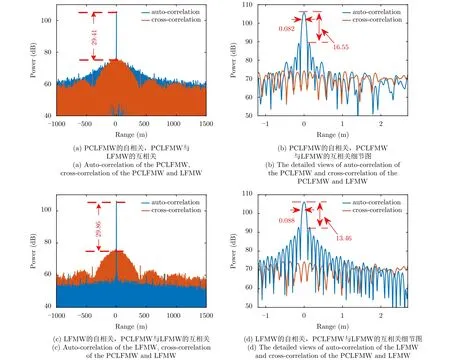
图5 PCLFMW与LFMW的自相关和互相关结果Fig.5 Auto−correlation and cross−correlation of the PCLFMW and LFMW
实验产生了两路正交波形,第1路为频率8.5~11.5 GHz、码率0.5 Gb/s的PCLFMW,第2路为频率8.5~11.5 GHz的LFMW,其自相关和互相关特性如图5所示。可看出,雷达的距离分辨率优于0.05 m,正交波形之间具有接近30 dB的正交性。
(2) 接收相参模式。
在接收相参模式下,各雷达产生正交PCLFMW并同时发射,每部雷达都能接收到所有雷达发射波形的回波,将各雷达的接收回波与其发射波形作匹配滤波,利用波形间的正交性,可区分各雷达发射波形的回波,并计算出各雷达到目标的距离。实验中产生了上述PCLFMW和LFMW,脉冲宽度8 μs,重复频率100 kHz。两部雷达的测距结果如图6所示,其中蓝色曲线表示单站测距结果,即雷达接收回波与该雷达发射波形作匹配滤波的结果;红色曲线表示双站测距结果,即雷达接收回波与另一部雷达发射波形作匹配滤波的结果。从图6中可看出,雷达1距离目标比雷达2远1.515 m。
(3) 全相参模式。
各雷达发射相参的LFMW,并根据接收相参模式下得到的相参参数,调整各雷达发射波形的时间和相位,使各发射波形能够同时到达目标,系统切换到发射相参模式。由于各雷达发射的波形在目标处相参叠加,每个雷达接收回波的幅度相比于单发单收提高N倍,功率增益为N2,而噪声功率不变,因此信噪比增益为N2。实验中,对两部雷达的接收回波匹配滤波的结果如图7所示,可看到,相比于单发单收,峰值功率增益分别为5.97 dB和5.92 dB,噪底功率基本不变,信噪比增益接近理论值6 dB。
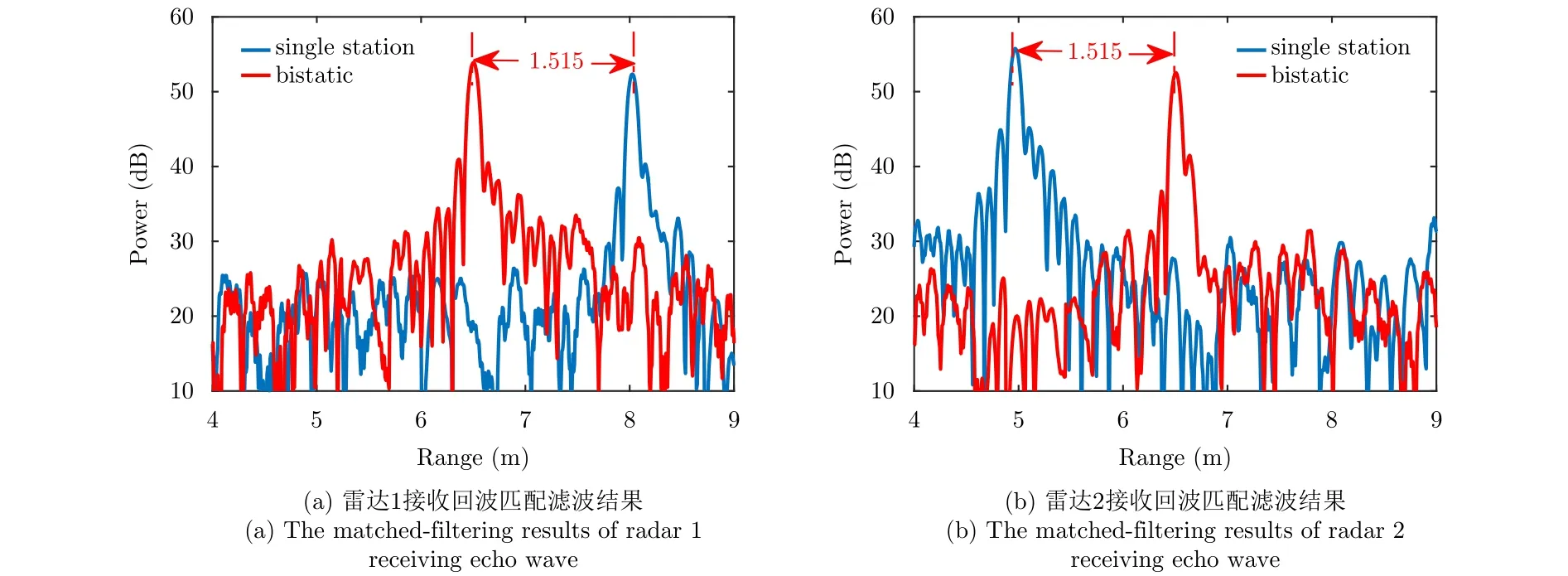
图6 雷达1和雷达2接收回波匹配滤波结果Fig.6 The matched−filtering results of radar 1 and radar 2 receiving echo wave

图7 雷达1和雷达2匹配滤波的结果(蓝色/红色:发射相参模式/单发单收模式)Fig.7 The matched−filtering results of radar 1 and radar 2 (Blue/red line: coherence−on transmit mode/monostatic mode)
最后通过数字信号处理,对两部雷达匹配滤波的结果进行延时和相位的对齐,并相参叠加完成接收相参,至此实现了收发全相参。匹配滤波结果峰值的功率进一步提高N2倍,由于各雷达接收机噪声独立,噪底功率提高N倍,信噪比增益为N。因此,全相参相比于单发单收,信噪比增益为N3。实验中,全相参与单发单收匹配滤波的结果如图8所示,可看到,雷达1和雷达2相比于单发单收的峰值功率增益分别为11.97 dB和11.96 dB,噪底分别抬高了3.65 dB和3.61 dB,信噪比增益分别为8.32 dB和8.35 dB。
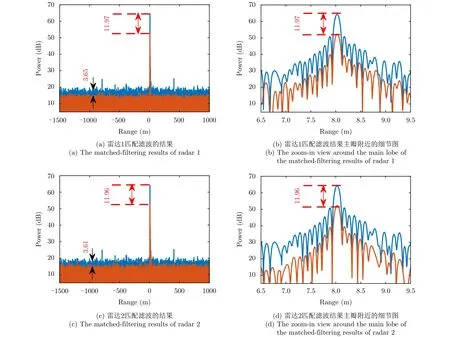
图8 雷达1和雷达2匹配滤波的结果(蓝色/红色:全相参模式/单发单收模式)Fig.8 The matched−filtering results of radar 1 and radar 2 (Blue/red line: full coherence mode/monostatic mode)
5 结论
清华大学提出的基于光子学的DCAR系统,带宽达到3 GHz,系统的测距分辨率在厘米量级,相比于已报道的微波DCAR系统,带宽提高了1个数量级。实验中利用1个宽带微波光子信号源和多个低速率的电光调制器,可实现多路宽带正交波形的产生,并支持切换为相参波形,满足DCAR各个工作模式的需求。此外,中心控制处理系统用光纤和各分布式单元雷达相连,可在中心控制处理系统完成雷达信号的产生和处理,解决微波分布式系统中的传输损耗,同时简化远端单元雷达。实验结果表明,全相参模式下,最终实现8.3 dB的信噪比增益。
