基于光波分复用网络的分布式多目标定位系统
2019-06-13徐威远陈文娟潘时龙
朱 丹 徐威远 陈文娟 刘 江 潘时龙
(南京航空航天大学雷达成像与微波光子技术教育部重点实验室 南京 211106)
1 引言
对目标进行准确定位因其在雷达、电子战和无线通信等领域的广泛应用,一直以来是研究的热点。使用TOA(Time of Arrival,到达时间)定位方法[1]的典型分布式定位系统结构为:在探测区域内广泛分布多个发射机和接收机,发射机发射的正交信号经目标反射后,由接收机接收,将不同接收节点的数据综合处理,利用信号的延时来计算目标位置。另一方面,随着电磁频谱环境的复杂化,对分布式定位系统的可重构性提出了要求。分布式目标定位系统具有阵元节点多、空间分布范围广,且各发射节点发射不同的正交波形的特点,其可重构特性的实现要求系统架构、发射波形组以及信号融合处理均能够适应系统的灵活重构。
当前分布式目标定位系统主要基于电子技术构建,各节点通过电缆或者无线连接,存在传输损耗大,工作带宽受限并易受电磁干扰的问题,从而限制了定位精度以及可重构性。由于难以实现宽带信号的长距离传输,需要对接收到的信号在各接收单元处进行处理,对各节点之间高精度的时间同步提出了要求,极大增加了各节点以及整个系统的复杂度。
面对上述挑战,微波光子技术为未来分布式可重构多目标定位系统的发展提供了可能的解决方案。该技术在大带宽复杂波形的产生,宽带、低损耗的信号长距离传输上具有很大的优势,且具有频率响应平坦和多路并行工作的能力。目前在基于光子技术实现单个目标或信号源的测距和定位工作方面已有进展。以色列的Grodensky D等人[2]利用光载射频传输实现了远端化天线前端,并结合掺铒光纤放大器的自发辐射和受激布里渊散射构建了测距系统,实验实现了10 cm的距离分辨率。中科院半导体所提出了功率谱可调的单发单收的超宽带噪声雷达,系统距离分辨率为厘米级[3]。西班牙的Llorente R等人[4]构建了光时分复用系统架构,实现对单个信号源的定位,通过光纤连接空间中广泛分布的传感节点,并严格控制光纤长度实现时分复用来区分不同节点的信号,实现对单个信号源的3维定位,定位误差为48.5 cm。南京航空航天大学雷达成像与微波光子学教育部重点实验室研究了基于光时分复用技术的多节点超宽带定位系统架构,用于对单个静止物体的定位[5],定位精度为3.9 cm;文献[6]提出并研究了结合时分复用和波分复用技术的分布式定位系统,对信号源进行定位,实验实现了对单个WiFi信号源的定位,定位精度为16.21 cm。
上述方案通过时分复用技术来实现分布式系统架构,各节点之间的光纤长度必须严格控制,不利于实现系统的可重构,限制了实际应用[3–5]。针对这一问题,太原理工大学提出了基于光开关网络的多节点测距系统[7],基于光反馈半导体激光器产生混沌信号,通过光开关选择发送到不同的远端天线单元对不同的目标进行测距,实现距离分辨率8 cm。日本的Kanno A等人[8]基于光子变频实现高频大带宽的线性调频信号产生,结合波分复用技术构建分布式机场异物监测雷达系统。南京航空航天大学雷达成像与微波光子学教育部重点实验室在这方面也开展了研究:提出并论证了基于波分复用技术的分布式超宽带雷达定位系统[9],构建可实现波长重用功能的超宽带信号光子收发单元,实现了对单个静止目标的最大误差为1 cm的定位;提出和论证了基于波分复用技术的分布式多发多收系统实现单目标的定位[10],最大定位误差为6.49 cm。综合上述研究现状,目前的研究当中所提出的分布式系统架构,针对的是单个信号源或者单个目标的定位,难以实现对多个目标的同时定位。
本文研究了光波分复用网络的分布式多目标定位系统[11],引入混沌光电振荡器实现宽带正交波形产生,引入基于光波分复用技术网络将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构得以简化。构建了两个接收机、两个发射机的实验定位系统,实现了对两个目标的最大误差为7.09 cm的2维定位,并对系统架构的可重构性进行了实验验证。
2 基于光波分复用网络的分布式多目标定位系统架构
图1给出了本文所研究的基于光波分复用网络的分布式多目标定位系统架构,主要由中心站和若干分布在探测区域的发射机和接收机组成[11]。该系统利用了光波分复用技术将所有接收机接收到的信号和所有发射机传出的参考信号一起传输到中心站进行信号处理。多个不同波长的光载波在中心站产生,每个光载波对应一个发射机或接收机。通过光波分复用器将多个光载波进行复用,通过光环形器1以及光纤传输到探测区域。在探测区域,复用的多个光载波经过光环形器2输入到光分插复用器(Optical Add-Drop Multiplexer, OADM)。光分插复用器在不同光波长处有配对的下载(Drop)口和上载(Add)口:通过Drop口将对应的光载波和其他波长分离,并注入到相应发射机或者接收机的光输入口;携带不同发射机及接收机原始数据信息的光信号通过对应的Add口合并入光分插复用器,再经过光环形器2和光纤传回中心站,进入信号处理模块,经过光波分解复用器分离后,分别注入到对应的光电探测器进行光电转换,并进行后续处理。由于每个光波长对应于一个发射机或接收机,因此基于波分复用技术即能对来自不同远端发射和接收单元的信号进行区分。该系统中不同发射机发射的信号具有正交特性,因此通过使用来自对应发射机的参考信号,即可获得不同发射机和接收机之间的TOA,在此基础上用适当的定位算法获得目标的位置。
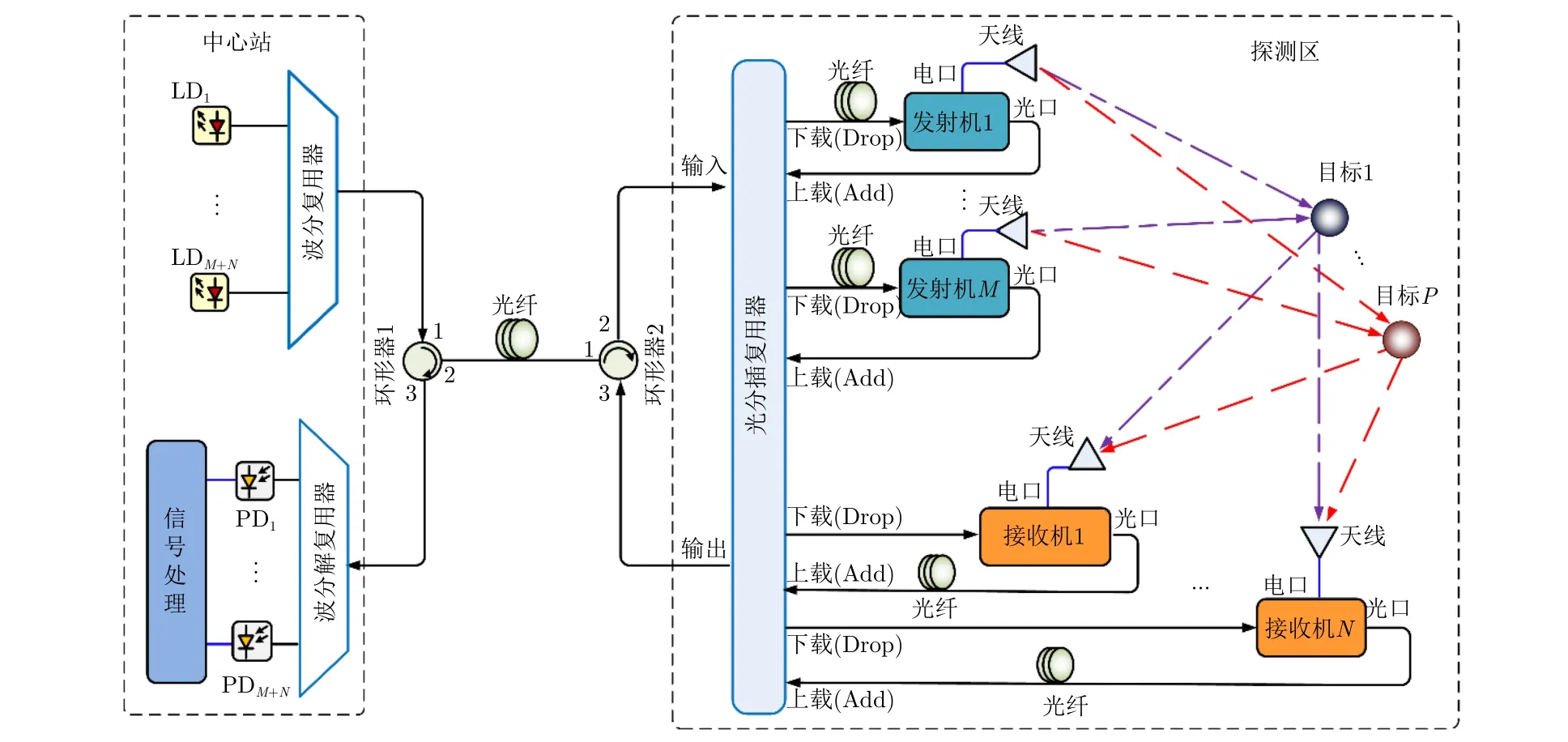
图1 基于光波分复用网络架构的分布式多目标定位系统Fig.1 Distributed multi-target localization system based on optical WDM network
该系统的发射机基于混沌光电振荡器产生混沌信号[10–12],其结构如图2所示。来自中心站的光载波注入到马赫曾德尔调制器,该调制器的光输出顺次连接一定长度的光纤,光分束器,光电探测器,电带通滤波器、电放大器,以及电功分器,组成振荡环路。其中光功分器用于将从电光调制器输出的光信号分成两路,一路构成振荡环路,另一路用作参考光信号,传输到中心站。电功分器的一路输出直接反馈回电光调制器的射频端口构建环路,另一路作为电输出,输出产生的混沌信号到发射天线。
信号波形的正交特性主要包括2个方面:一是各发射信号自相关函数近似为冲击函数,二是不同发射信号之间互相关函数近似为0。由于混沌信号拥有类随机特性,且对初始值敏感,因此用以构建不同发射机的器件的细微差别即可带来不同的初始值,从而保证不同发射机发射的混沌信号的良好正交特性,为系统的高精度定位奠定了基础,并且保证系统可重构性的实现。同时,基于光电振荡器产生的混沌信号带宽较大,保证了延时估计及定位系统的精度。
该系统的接收机如图3所示,主要由电放大器和马赫曾德尔调制器构成。由于本文所研究的基于波分复用网络架构的多目标定位系统,信号处理均在中心站处实现,因此接收机处仅实现电光调制,结构大为简化。来自中心站的光载波注入到电光调制器的光输入口,接收天线接收到目标的散射信号后,经过低噪声放大器后注入到电光调制器的射频口,从而将接收天线收到的信号调制到对应光载波上,传回中心站进行处理。
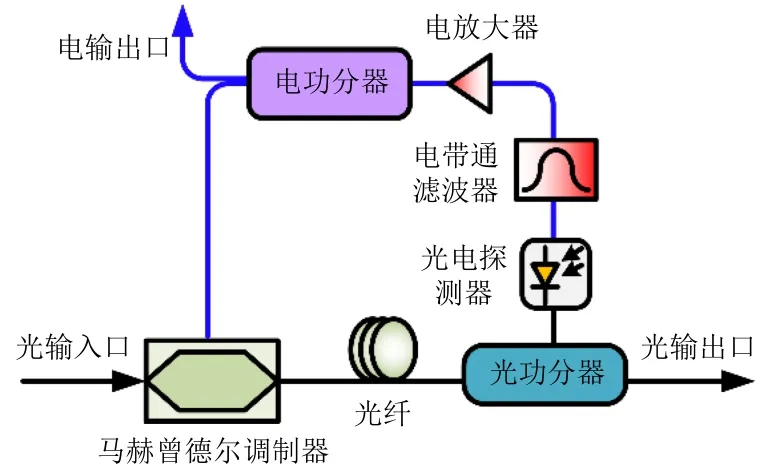
图2 发射机结构图Fig.2 The structure of the transmitter
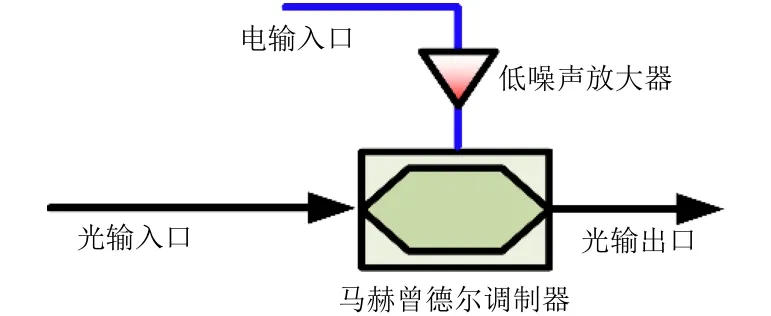
图3 接收机结构图Fig.3 The structure of the receiver
3 TOA定位原理
本文所研究的基于光波分复用网络的分布式多目标定位系统使用TOA定位方法进行多目标的定位。TOA定位方法典型的定位过程为:呈现分布式的多个发射机及接收机的位置坐标已知;不同发射机发射的信号经过目标反射,由各接收机接收;基于时延估计算法获得信号从发射机到目标,再到接收机的传播时间,从而得到目标与相应发射机及接收机的距离之和,建立方程组。进行3维定位时,基于多组发射机和接收机构建的方程组表现为多个椭球,而进行2维定位时,则表现为多个椭圆。通过求解该方程组即可得到多目标的估计位置。
本方案中使用广义相关时延估计算法来实现时延估计,并以此计算传播距离进而确定方程组;使用泰勒级数展开法作为定位算法来求解定位方程组。对多个目标定位时,方程组将出现虚解,通过数据关联的方式进行排除。本方案中实现多目标定位的整个解算流程如图4所示。

图4 定位解算流程Fig.4 The localization solution process
以2维情况为例,对于具有K个发射机和L个接收机的定位系统,发射机的位置为(xTi,yTi),i=1,2, ··K,接收机的位置为(xRj,yRj),j=1, 2, ··L,待进行定位的目标位置为(xh,yh),则目标h和发射机i的距离为

图5 基于两发两收系统的TOA定位示意图Fig.5 Schematic diagram of TOA localization with the system composed of two transmitters and two receivers

目标h和接收机j之间的距离为

从发射机i经目标h反射,再到接收机j的距离之和为
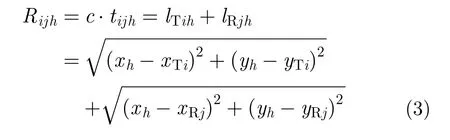
其中,tijh为从发射机i发射的信号,经目标h反射,再到接收机j的到达时间。式(3)描述的是以发射机i(xTi,yTi)和接收机j(xRj,yRj)为焦点的椭圆。基于K个发射机和L个接收机对P个目标进行定位,将产生由K·L·P个椭圆方程,通过求解方程组即可得到目标的位置。由于相同接收机及发射机对应不同目标的延时在建立方程组时可能存在匹配模糊,通过数据关联,进行多次解算可以去除虚解,实现解模糊。
基于两发两收的系统对两个目标进行2维定位时,其模型如图5所示,可以得到8个椭圆,被定位的目标即位于椭圆的交点处。对方程组进行求解,并通过数据关联去除虚解之后,所得到的解即为目标的位置。
4 实验结果及讨论
基于图1所示的原理图,实验构建了两发两收的定位系统,对两个金属目标进行2维定位。使用1台4通道激光器(Agilent N7714A)产生4个波长为1551.7 nm, 1548.5 nm, 1550.1 nm, 1553.3 nm的光载波,分别分配给发射机1和发射机2,接收机1和接收机2。所使用的光波分复用器(Wavelength Di-vision Multiplexing, WDM)通道间隔为100 GHz。所使用的光分插复用器通道间隔为100 GHz。在中心站,通过光解波分复用器分离的4路光信号,分别使用4个带宽为20 GHz的光电探测器实现光电转换。使用实时示波器(Keysight Infiniium DSOX93304,采样率80 Gsa/s)同时采集对应发射机1和发射机2,以及接收机1和接收机2的4路电信号,进行后续定位计算。
实验中的发射机基于图2构建,其马赫曾德尔调制器的工作带宽为10 GHz,带通电滤波器的通带为3.1~10.6 GHz,单模光纤长度为1 km,微波放大器的工作带宽为2.0~26.5 GHz,增益为30 dB。接收机基于图3进行构建,马赫曾德尔调制器的工作带宽为10 GHz,低噪声放大器带宽为40 GHz,增益为30 dB。
所产生的混沌信号的波形及频谱分别如图6(a)和图6(b)所示,其带宽为3.1~10.6 GHz。所产生混沌信号的自相关结果如图7(a)所示,可以看出相关函数近似为冲击函数。混沌信号的带宽将影响自相关结果主瓣的时域半高全宽,从而影响距离分辨率。大的带宽能够保证窄的自相关主瓣,从而保证高的距离分辨率。从图7(a)中的主瓣放大图看出,实验产生的混沌信号自相关结果的主瓣的时域半高全宽约为0.04 ns,将该值与光速相乘,可得所产生混沌信号的距离分辨率约为1.2 cm。不同混沌光电振荡器所产生混沌信号的互相关函数如图7(b)所示,可以看出不同发射信号之间的互相关函数近似为0。从图7可以看出,本实验中所产生的混沌信号具有较好的正交特性。

图6 混沌信号Fig.6 The generated chaotic signal
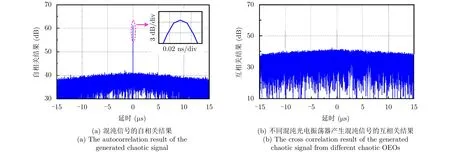
图7 混沌信号的相关结果Fig.7 The results of the generated chaotic signal
接收机所接收的信号经过电光调制,传送回中心站,通过光电转换后得到的电信号的波形和频谱分别如图8(a)和图8(b)所示。由于不同发射机发射的混沌信号是正交的, 因此将不同发射机的参考信号和相应接收机的接收信号进行相关后即可获得相应的时延。基于实验获得的发射信号和接收信号数据直接进行时延估计所得到的TOA估计值还包括了所构建的实验系统所带来的时延。为了获取准确的时延值,通过系统校准来消除系统本身所带来的时延:对位置已知的待测物体进行定位,将通过算法获得的TOA值减去已知的真实值,即为系统引入的固有时延。通过多次多点的测量,实现对系统时延的有效校准。

图8 接收信号Fig.8 The received signal
为了研究所构建的基于光波分复用网络的分布式多目标定位系统的定位精度,实验中将2个待测的金属物体作为目标进行定位,2个目标的真实坐标位置为(0 cm, 95 cm)和(40 cm, 95 cm)。各发射及接收机的位置设置如图9所示,分别为:发射机1 (–60 cm, 0 cm),发射机2 (60 cm, 0 cm),接收机1 (–30 cm, –40 cm),接收机2 (30 cm, –40 cm)。实验中进行5次独立的测量,取5次TOA测量值的平均值,按图4所示的TOA定位解算流程进行定位。所得到的目标坐标分别为(–6.83 cm, 93.10 cm)和(41.21 cm, 93.55 cm),与目标真实位置相对比,定位误差分别为7.09 cm和2.26 cm。
进一步地,对基于光波分复用的分布式多目标定位系统的可重构性进行了实验研究。各发射及接收机的位置重新进行设置,如图10所示:发射机1 (–30 cm, 0 cm),发射机2 (30 cm, 0 cm),而接收机1和接收机2的位置保持不变。待定位目标仍然保持在原位置不变。对系统实验重新进行校准后,再次基于上述流程进行目标定位。只需在泰勒级数展开算法中相应更改发射机的位置参数,即可算出新的定位结果。实验所得到的定位结果为目标1(1.04 cm, 94.05 cm)和目标2 (33.41 cm, 96.81 cm),误差分别为1.41 cm和6.66 cm。可以看出,改变发射机或者接收机的位置后,只需对应进行参数调整,系统即可正常工作,验证了该定位系统的灵活性。

图9 对2个目标的定位实验结果Fig.9 Experimental results of two targets localization

图10 改变发射机位置对两个目标的定位实验结果Fig.10 Experimental results of two targets localization when changing the transmitter positions
5 总结
本文研究了基于光波分复用网络的分布式多目标定位系统,通过引入基于光波分复用技术构建的网络架构,结合基于光电振荡器的宽带正交混沌波形产生,将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构得以简化。进行了原理验证实验,构建了两发两收的实验定位系统,实现了对2个目标的最大误差为7.09 cm的2维定位,实验验证了系统架构的可重构性。相关技术可应用于未来雷达、电子战和无线通信中的多目标定位。
