智能垃圾桶的研究与设计
2019-06-12许妙佳
刘 红, 许妙佳
(上海电机学院 电子信息学院, 上海 201306)
市场上垃圾桶的款式大致可以分为以下3种:① 脚部踩踏型。避免了手与垃圾桶盖子的接触,同时也节省了丢垃圾所消耗的体力。② 加盖型。最常见的垃圾桶款式之一,有效阻止了气味蔓延,一定程度上保障了周边环境。③ 360°旋转型。目前大部分城市垃圾桶的类型,垃圾桶的可旋转方便了垃圾的倾倒和回收,大幅节省了环卫工作人员的体力和时间[1-3]。
目前,各种传感器模块的普及为智能垃圾桶提供了各种扩展功能。通过研究传统垃圾桶使用中存在的问题,研制了一种新型的智能垃圾桶,这种新型智能垃圾桶能充分利用垃圾桶容积,设计了满溢警示功能模块,并对区域内的垃圾桶进行集中监控和管理,建立了智能垃圾回收系统,同时为今后新的功能扩展预留了接口。
1 系统设计
使用的Arduino Uno开发板是一个ATmega328的单片机[4-5],ATmega328的单片机是一个集成电路,有14个数字输入输出端,其核心处理器是AVR,针脚数有32个,工作温度范围在-40~+85 ℃之间。Arduino Uno开发板模拟的输入端口有6个,一个陶瓷晶振16 MHz的、一个与电脑通信的USB连接口、一个电源插口、一个用于通信的ICSP的接口以及一个RESET复位按钮。
研制的智能垃圾桶根据功能有:传感器模块、无线通信模块、压缩模块、电源模块以及接收终端,如图1所示。其中传感器模块相当于智能垃圾桶的“眼睛”和“耳朵”,分别采用了红外传感器、湿度传感器和环境光传感器,主要负责采集垃圾桶周边以及垃圾桶内垃圾的信息,并将数据传给上位机,由上位机作相应处理。无线通信模块贯穿了整个智能垃圾桶的通信体系,通过无线通信模块实现下位机和上位机之间的数据通信[6-9]。压缩模块是智能垃圾桶的亮点和创新点,采用类似机械臂的结构,该结构可以根据垃圾桶内的垃圾深度对垃圾进行挤压。接收终端就是PC端,环卫工作人员的一切检测以及操作基本都是在接收终端完成的,还可以在接收终端远程实时检测垃圾桶的状态,并且根据不同的状态做出相应的处理。电源模块则为整个系统进行供电。

图1 智能垃圾桶的模块组成
2 压缩模块工作原理
智能垃圾桶的工作流程是先由传感器采集如下数据:垃圾桶内垃圾的深度、垃圾桶盖的开关状态以及垃圾桶内的温度、湿度等[10],将采集到的数据反馈给ATmega328单片机,由单片机做出判断,当检测到垃圾桶深度接近设定值时,垃圾桶顶盖上安置的机械臂会控制托盘对垃圾桶内的垃圾进行压缩。当温度、湿度传感器检测到垃圾桶内的温湿度逼近某一个设定值时,会打开垃圾桶内的消毒喷淋装置或者进行远端报警,防止高度腐烂的垃圾传播病菌,污染城市环境。当外置的系统重置按钮按下时,系统会重置各模块的数值和状态,这个功能是为了防止系统进程卡死所设计的,也可作为紧急制动按钮使用。如果垃圾桶深度始终接近某一个数值时,或垃圾的温、湿度始终逼近某个值时,系统会自动对上位机发出警示,提醒PC端检测的环卫工作人员及时处理该垃圾桶。关于压缩模块的流程如图2所示。

图2 智能垃圾桶压缩模块流程图
3 硬件设计
本文研制的智能垃圾桶是由微电脑控制芯片、控制电路、多种传感器探测装置、机械传动部分以及蓝牙通信模块5部分组成。控制电路模块中采用拍合式电磁铁来控制垃圾桶盖的打开与关闭,当人的手或物体接近投放口时,垃圾桶盖会自动开启。整个系统不需要外接电源,用电池供电。
3.1 红外测距传感器
采用的红外测距传感器DFR0107,将其接入电源并通电时,会处理收集到的数据,通过一个线性公式将传感器采集到的数据转化成距离值[11]。此红外测距传感器的精确范围在30~9 000 mm。
3.2 环境光传感器
本文采用的环境光传感器是DFR0026[12],该环境光传感器是一个基于光敏二极管的传感器,作用为对周围环境的光线强度进行检测,以此与单片机进行互动。环境光传感器DFR0026相比于传统的利用光敏电阻制成的光敏传感器可靠性更高,灵敏度更好,体积更小,反应速度更快。由于传统的光敏电阻容易被环境温度影响,受光照时的反应速度不快,而且容易被消耗导致成本变高。在本文中采用环境光传感器主要是用来判断垃圾桶盖的开关情况,如果垃圾桶盖子被打开,环境光传感器就能检测到光照,立刻将可能正在向下压缩的托盘收回,防止误伤,同时还能防止将垃圾丢到压缩托盘上。由于垃圾桶盖的开关是瞬时的,因此基于光敏二极管的环境光传感器比基于光敏电阻的环境光传感器要更适合。
3.3 温湿度传感器DHT11
本文采用的温湿度传感器DHT11是一个混合型温湿度传感器,它包含了校准的数字信号对外输出,保证了它的稳定性以及可靠性和极高的准确性[13]。因为NTC的测温元件、感湿元件以及一个极小的8位单片机的加入,控制了这个温湿度传感器的成本,也在一定程度上保证了其抗干扰性能和响应速度。它本身有3个平行引脚在Arduino开发板上,连接十分便捷。
在垃圾桶内部内置了温湿度传感器DHT11[13],实时监控垃圾桶内垃圾的腐烂情况,一旦垃圾桶内温湿度到达阈值,就会由内置在垃圾桶侧壁的喷淋系统对垃圾喷洒消毒液,及时对垃圾进行消毒,杜绝病毒的传播。喷洒消毒液的同时也会向上位机发出报警信息,第一时间提醒环卫工作人员对该垃圾桶内垃圾进行处理。
3.4 通信模块
设计中通过蓝牙技术来建立上位机和Arduino之间的数据通信。相比于Wifi通信,蓝牙通信在目前的智能设备中普及面较广且应用范围大;蓝牙成本低;而且蓝牙使用起来往往是点对点,因此建立通信十分方便,而Wifi通信无论是成本还是建立通信所需要的AP设备或是路由器都不适合。此处还有一个功耗问题,同样的6节5号电池给Wifi通信模块供电只能坚持短短几天[14],而蓝牙通信模块却能坚持长达数周,由于垃圾桶供电模块的局限性,不采用Wifi通信模块。设计中采用的蓝牙通信模块是HC05,HC05本身是类似于电脑一体机的一款蓝牙设备。
3.5 机械结构
菱形折叠机械手臂对于转轴部分的结构要求较高,项目中的方案是上下两手臂安装选用相同长度的手臂并使用相同转速的电动机,机械臂在收缩和展开过程中都会占用一定的空间,在方案设计阶段,考虑了折叠功能。该设计方案中,将菱形折叠机械臂定位3级(n=3),d2略大于45 cm(材料长度不能随意取值)。动力系统用2个相同转速的电动机提供相同大小的力矩,齿轮同时带动机械臂,避免力矩过大。项目中用TowerPro SG90舵做压缩机械臂的两个主动轴,通过舵机和硬纸板的连接,模拟出了一个能够向下压缩的菱形机械结构,菱形机械结构如图3所示。
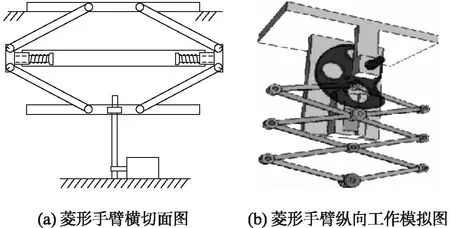
图3 菱形机械压缩手臂结构图
3.6 智能垃圾桶
设计的智能垃圾桶控制程序分为主程序、等待延时和定时中断。主程序对红外测距传感器DFR0107、环境光传感器DFR0026、温湿度传感器DHT11和震动传感器等进行管控。智能垃圾桶的制作过程是:硬件安装(模块链接);烧录程序;制作垃圾桶模拟模型。实验阶段为了监控显示效果以及管控结果,系统中另外加入了I2C LCD1602液晶模块。上位机软件(Serial Port Utility)用于实时检测垃圾桶的状态,包括:垃圾桶深度、垃圾桶剩余容量、垃圾桶盖子开关与否以及垃圾桶已达警示状态,用户也可通过其来监控相关信息。拓展版串口监视器Serial Port Utility和Arduino IDE软件中自带的串口监视器最大的不同是:它可以将获得的数据通过TXT文件导出,这为后续推算垃圾流量周期提供了数据。
垃圾桶由6节5号电池供电[15],用2块I2C LCD1602液晶模块来分别显示垃圾桶的剩余容量、状态以及垃圾桶内部的温度、湿度。数字按钮模块用于代替Arduino开发板上的Reset键。数字红色LED发光模块是用来在托盘压缩过程中警示环卫工作人员或是丢垃圾的人员注意托盘正在挤压垃圾,防止被托盘误伤。
图4左下角是温湿度传感器。图4中的两个按钮分别控制软重置功能和LCD显示屏背光功能,蓝牙模块安置在结构正上方的纸板背面,以防外力干扰[16]。

图4 智能垃圾桶总体结构图
4 结 语
本文介绍了基于Arduino的智能垃圾桶的设计理念,设计了系统的各个模块:研制的传感器模块、无线通信模块、机械压缩结构模块以及接收终端和电源模块。智能垃圾桶能有效地利用垃圾桶的容积,对垃圾桶内的多种数据实现有效监控,减轻工人的劳动强度,提高环境卫生水平。理清模块与模块间的逻辑关系,阐明了设计理念和思路。为了防止系统进程锁死,在系统中写入了一个软重置代码,并将按钮做在了垃圾桶顶盖上,方便非专业人员使用。使用的软件是一个外挂软件,主要用于数据的接收、存储以及导出。