应用于机器人辅助微创外科手术的术前规划方法
2019-06-12王树新刘瑞达李建民
梁 科,王树新,刘瑞达,李建民
应用于机器人辅助微创外科手术的术前规划方法
梁 科1, 2,王树新1, 2,刘瑞达1, 2,李建民1, 2
(1. 天津大学机械工程学院,天津 300350;2. 天津大学机构理论与装备设计教育部重点实验室,天津 300350)
机器人辅助微创外科手术(RMIS)技术可帮助外科医生有效克服传统微创外科技术的不足,提高外科医生对手术的执行能力,其所带来的良好的临床效果已被广泛接受.对于机器人来说,术前规划工作相对于传统微创外科手术更为复杂,合理的术前规划可以有效避免机器人末端执行器之间的相互干涉,提高机器人辅助微创外科手术的可操作性、可达性和可视性等,这对手术效果至关重要.本文将微创外科手术规划临床经验与机器人操作性能知识相结合,提出了一种基于多目标粒子群优化算法(MOPSO)的术前规划方法,从机器人有效工作空间、碰撞干涉检测、机械臂与器械末端运动灵活性及手眼协调性几个方面入手,对机器人进行综合性的定量评价,并以此为依据通过计算求解得出以合理的患者体表手术切口位置与机器人初始设置位置为主要目标的方案.为验证该方法的有效性,以机器人辅助腹腔镜胆囊切除术为实验范例,应用“MicroHand S”手术机器人系统为实验设备,针对同一名病患,将外科医生的经验方案和由算法计算得出的术前规划方案进行比较分析,其结果证明了该方法的优越性.实验结果表明,由优化算法得到的术前规划方法优势明显,有效地解决了以往仅依靠临床经验进行机器人辅助微创外科手术术前规划所带来的问题,提高了手术的安全性和效率.
术前规划;多目标粒子群优化算法;机器人辅助腹腔镜胆囊切除术;“MicroHand S”系统
目前,微创外科手术因其良好的临床治疗效果已被广大医务人员及病患所接受.然而,相较于传统的开放式手术,手术切口的限制使得微创外科技术也为医生带来诸多操作难题,如手术器械灵活性受限、手眼协调能力降低、深度感知缺乏、操作者手部的颤动在器械末端被放大等.机器人辅助微创外科手术(RMIS)的引入,有效地克服了上述传统微创外科技术的不足,提高了外科医生进行手术的执行能力.
术前规划指的是在进行手术任务之前,医生通过病患的生理特征,结合解剖学与病理学相关知识决定手术方案这一过程.对于机器人辅助微创外科手术来说,合理选择切口位置以及相应的机械臂初始摆位是术前规划的两个重要内容.不合理的术前规划将导致机器臂之间、器械之间或器械与内窥镜之间频繁地碰撞干涉,机器人的可操作性、目标可达性和可视性亦会大大降低[1-3],此时医生不得不进行手术切口的重新选择与机械臂重置,甚至转为开放性手术,这既延长了手术时间,又给病患带来额外的损伤与并发症风险,由此引发的一系列安全性问题不容小觑.由于缺乏机器人方面的相关知识,即使有临床经验的医生在处理此类问题时也会出现失误,因此,如何有效解决此类问题,为医疗相关人员在进行术前规划时提供切实可行的理论指导方法,是当前微创外科手术机器人研究领域迫切需要解决的问题.
以往的研究工作中,Cannon等[4]通过将手术器械与内窥镜夹角与理想角度之间的偏差最小化作为机器人辅助冠状动脉旁路移植术中最佳手术切口的选择依据;Tabaie等[5]以研究人体解剖特征入手,为Zeus机器人系统执行内窥镜下冠状动脉旁路移植术的切口选取提供了指导;Cestari等[6]提出了一种使用简单工具进行定位的方法,帮助医生在机器人辅助腹腔镜前列腺根治术中找到合适的手术切口.此类研究方法主要由医生根据实际操作经验得出,对机器人辅助微创外科手术的术前规划具有一定意义的指导作用[7],但一般仅针对手术切口的选择,而忽略了机器人操作性能方面的考虑.虚拟现实技术为医疗工作者们提供了可视化的模拟手术操作环境,医生可以在虚拟环境中进行多次可重复性的手术练习[7-10];基于虚拟现实技术的术前规划可作为实际手术操作的预演,提前发现术中操作可能出现的问题[11-13],但同样忽略了对机器人性能方面的考虑.通常术前规划方案的改变会直接影响微创外科手术机器人的运动学性能[14],由于患者的个体解剖学特征差异,仅凭借模拟仿真并不能将实际情况下影响手术操作所有不确定因素充分考虑在内.为了综合考虑临床需求与机器人的操作性能,Sun等[15]提出了描述机器人在腹腔内工作空间及内窥镜可视性的评价指标,并以优化机器人末端执行器的运动灵活度指标作为优化原则选取合理的手术切口位置与机械臂初始设置.Trejos 等[16]确定出CT扫描图像下患者体表每个手术介入位置所对应的所有机械臂基座位置集合,并以满足可达性要求及GCI指标最大化作为评价标准对该集合进行筛选.Azimian等[17-18]将手术目标定义为几何体,构造多目标函数优化机器人性能指标,如运动灵活性、可达性、器械间夹角、可操作性等以解决术前规划问题.与其他方法相比,基于多目标优化的术前规划方法对术中影响因素的考虑更为全面,由此得到的方案也更加客观合理,目前已成为RMIS术前规划研究的重要方向[19].
本文以实验室自主研发的微创机器人系统“MicroHand S”作为实验平台,针对腹腔镜胆囊切除术的具体要求,提出了一种基于多目标粒子群优化算法(MOPSO)的术前规划方法以量化评估机器人在手术操作中的性能表现,进而确定合理的术前规划方案,并通过与经验丰富的外科医生提出的方案进行比较,有效地验证了所提出方法的可行性.
1 腹腔镜胆囊切除术需求
腹腔镜胆囊切除术(LC)属于微创外科手术范畴,医生将细长的手术器械通过在患者体表切口伸入体内,并借助内窥镜装置提供的视觉反馈实施手术操作.手术器械切口布局一般采用“三孔”法,如图1所示:A切口位于脐部附近,用于置入腹腔镜以探查腹腔内部环境并寻找病灶区域,待病灶区域位置确定后,手术器械经由切口B与 C分别置入,医生在腹腔镜监视下完成处理胆囊周围血管与胆管并游离胆囊的操作并最终将胆囊摘除的手术操作.内窥镜与手术器械切口以病灶为中心呈扇形分布,左器械切口可选区域(黄点所示)与右器械切口可选区域(绿点所示)分别位于以内窥镜切口A与病灶区域D的连线为轴线的两侧,具体位置以遵循便于手术的原则选取.

A—内窥镜孔;B—左器械切口区域;C—右器械切口区域;D—病灶区域
2 “MicroHand S”机器人系统构成
“MicroHand S”机器人系统[20-21]为主-从控制模式,主要由医生操作平台(主操作端)及机械臂台车(从操作端)两部分组成.如图2所示,从操作端具有三自由度的被动部分(包括被动臂横梁及操作臂支架)用于术前调整机械臂与患者的相对位置;3个主动机械臂(包含1个内窥镜操作臂及2个器械操作臂)集成于操作臂支架处,此结构设计相较于da Vinci机器人系统更为小巧紧凑.

图2 “MicroHand S”机器人系统构成
机械臂以添加被动关节的方式满足切口约束要求,其构型如图3所示.该被动关节在主动关节和切入点的联合约束下运动.

图3 机械臂构型
3 机器人性能评价指标
为确保手术安全性,合理的机器人辅助微创外科手术操作至少应满足以下5个条件:
(1) 手术操作必须在医生实时监控下完成;
(2) 手术机器人在手术区域范围内必须具有足够的灵活性与自由度;
(3) 手术过程中应尽量避免造成无关脏器损伤;
(4) 机器人在手术操作区域避免发生碰撞干涉;
(5) 应有助于促进医生进行手术操作时手眼动作的协调.
基于上述考虑,本节提出了与机器人工作空间、碰撞干涉、运动灵活性及手眼协调性相关的评价指标,定量评估“MicroHand S”系统的操作性能,并以此为依据寻求合理的手术器械介入位置及相应的机械臂初始设置.
3.1 机器人工作空间的布局
为保证手术器械能够达到手术区域中的任意位置,机器人的工作空间必须满足对手术区域完全覆盖的要求.设为手术器械末端点,则机器人工作空间可描述为

(1)
式中:T表示手术区域;表示机械臂关节变量;表示相应关节的运动范围.
为量化评价机器人的可达性,在求得机器人运动学关系后,首先构造病灶区域的几何包络面(如正方体、长方体、球体等),引入文献[22]的研究方法对手术区域进行离散化处理(如图4所示),将其均分为总数为的相互独立子空间,设P表示左、右器械末端可同时到达的位置点,以二进制表示机器人在工作空间内对手术区域的可达程度,即

(2)
式中:P为目标区域的任意离散位置;E为对应的夹持点位置.P的取值取决于手术器械末端到达P时E是否在夹持点的运动约束空间内,因此,机器人的可达性可表示为
(3)
由此可知,当=1时,可实现器械工作空间对手术区域的完全覆盖;若<1,则表示器械并不能同时达到手术区域内所有位置,不满足手术任务能够顺利完成的必备条件.
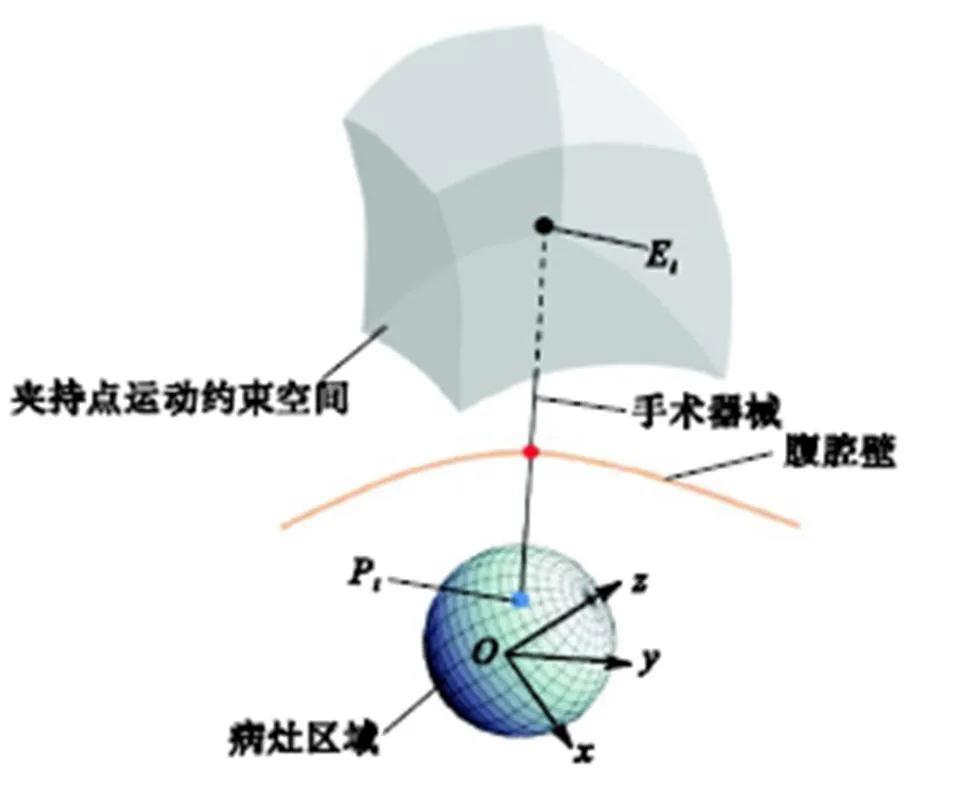
图4 可达性约束
手术过程中,器械的运动必须受到医生的实时监控,即可视空间必须将机器人末端工作空间包含在内.Rosen等[23]利用Blue DRAGON系统进行常用的微创手术操作实验时发现,在大约95%的手术时间里,操作人员手中的手术工具运动集中于以手术切口为顶点、锥角60°的圆锥空间内;然而,实际情况中机器人末端的运动可达空间往往大于所需[21],而一旦手术器械脱离视野,就存在对病灶区域周围无关脏器造成误触碰伤害的风险.因此,手术空间的布局应尽可能地减少可视盲区,增大操作监控范围.同时,考虑到手术任务应由双手协调完成,应满足以下关系:

(4)
式中e为机器人的有效工作空间.以l表示左手手术器械末端工作空间,r表示右手手术器械末端工作空间,E为内窥镜可视空间,则如图5所示,有

(5)
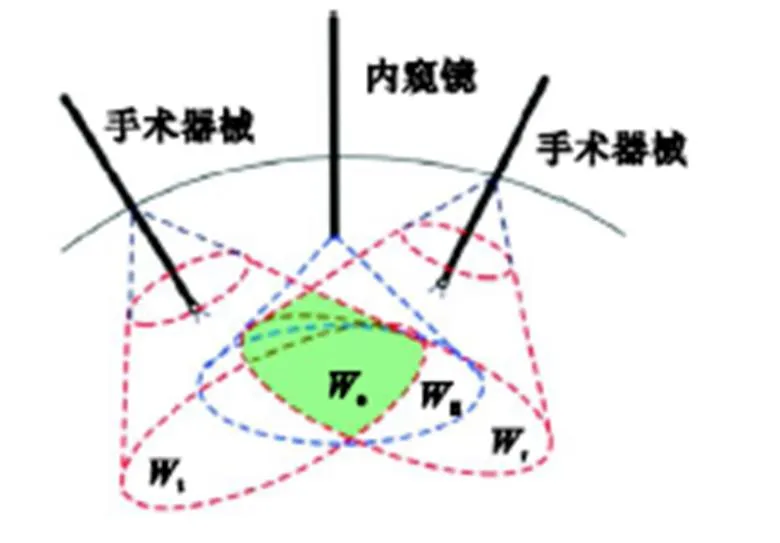
图5 可视性约束
基于上述考虑,将有效空间与可视空间的交集与左右器械工作空间的总和的比值作为可视区域指标(visual range index,VRI),以数学公式表示为如下 形式:

(6)
由式(6)可知,VRI值越大,则机器人手术器械双手操作空间可视化程度越高,手术操作的安全性也因此得以提高.
3.2 碰撞干涉模型的建立
由腹腔镜手术操作方式可知,左右器械臂位于持镜臂两侧,且内窥镜及持镜臂在手术器械运动过程中始终保持固定的位姿,由此,机器人工作空间内的碰撞干涉可能发生在以下3种情况中:
(1) 体外器械臂与持镜臂之间发生碰撞干涉;
(2) 体内手术器械与内窥镜之间发生碰撞干涉;
(3) 体内手术器械之间发生碰撞干涉.
上述3种情况中,第3种作为人为可控因素,可由操作人员及时发现并进行调整,其余二者则是在操作者不可视情况下发生的,具有不可预估性,故本节只针对前面两种情况进行研究.
由“MicroHand S”构型及机械臂运动时的相互位置关系可知,患者体外机械臂的碰撞干涉主要发生在持镜臂与器械臂器械夹持关节(点)之间,如图6所示.平面由分别代表内窥镜臂和内窥镜的向量1和2所确定,向量3和4分别表示器械臂与手术器械,则器械臂与持镜臂之间是否发生碰撞干涉可由点与平面之间的最小距离判断:

(7)
式中表示为平面上的持镜臂夹持点.出于机械臂体积考虑,设置阈值0,当0时,器械臂与持镜臂之间发生碰撞干涉.
手术器械在患者体内运动时,内窥镜杆应处于相应的工作空间之外,否则二者将发生碰撞干涉.以圆柱体代表工具杆与内窥镜杆(如图6所示),设1、2为圆柱体始端点,分别代表器械与内窥镜介入位置;3、4为圆柱体末端点,分别代表手术器械腕关节及内窥镜末端;5、6分别为两圆柱体轴线的公垂线垂足.由此可建立两圆柱体轴线方程分别为

(8)
式中:1与2分别为2和4的方向矢量,即1=4-2,2=3-1;1与2为比例参数.则两圆柱体间的碰撞干涉问题可由空间两异面直线间的最短距离判断,即

(9)
式(9)描述的是一个无约束优化问题[24],由极小值条件,1、2可表述为

(10)


(11)
3.3 灵活性优化分析
文献[25]中,条件数用于描述机器人运动的精确程度,其定义为雅可比矩阵最大奇异值与最小奇异值之比,然而,条件数仅反映了机器人当前状态下的工作性能.为了研究机械手在整个工作空间中各个运动方向上传递精确而连续的速度及力的能力,Stocco等[26]提出了全局各向同性指数GII,其表达式为

(12)
当末端执行器位于0时,雅可比矩阵的奇异值达到最小值min;当末端执行器位于1时,雅可比矩阵的奇异值达到最大值max.
当机器人接近关节运动极限时,其运动性能会出现明显的下降,因而,为保证运动灵活性,应使机械臂各关节的初始设置尽量远离相应的关节运动极限.文献[27]中提出了构造势函数优化关节运动范围的方法,其定义为

(13)

(14)
式中:a为各关节活动范围内的中值;θmax和θmin分别为第个关节角的最大和最小值.
3.4 手眼协调指标评价
Azimian等[18]提出,进行机器人辅助微创外科手术操作时,手术器械之间的夹角越接近于传统腹腔镜手术中的操作角度,越有助于提高医生的手眼协调能力,以二者之间均方根误差作为评价指标,即

式中:l()和r()分别为左、右器械同时指向第个采样点时对应的向量;为手术操作路径离散采样点个数,如图7所示.
图7 手术器械操作角度
Fig.7 Manipulation angle of instruments
4 术前规划算法的提出
由上述分析可知,切口位置与机械臂初始设置确定以后,机器人的目标可达性、可视性、灵活性等工作性能也随之确定,因此,原则上来说,术前规划方案的制定应符合各项评价指标达到最优的要求.然而,各评价指标之间往往存在相互影响、相互制约的关系,对其中的一个指标优化必须以忽略其他目标为代价,比如某一术前规划方案下机器人可视性达到最优,而对应的运动灵活性却并不理想,故仅针对局部的评价指标进行术前规划是不合理的,需要从全局上考虑各优化指标之间的均衡关系,这就使得机器人术前规划问题转化为多目标优化问题.
建立多目标优化数学模型如下:

使得

,,(16)
粒子群优化(PSO)算法是由Kennedy和Eberhart于1995年提出的一种进化计算方法,其设置参数较少,易于编码实现,作为一种有效的优化算法已在诸多工程领域中得到成功应用.将PSO算法推广到多目标优化中需要解决全体极值和个体极值的选择问题.多目标粒子群优化(MOPSO)算法[28]在原有PSO算法的基础上加以改进,采用了精英归档技术,在种群外保留一个Archive集以保存算法进化过程中产生的非劣解,粒子位置与速度更新时所需的全体极值直接从该集合中选取,因而非常适合解决此类术前规划问题.
图8所示为本文所提出的术前规划算法具体流程,包括数据预处理、优化计算和方案选择3个部分.首先利用CT或MRI扫描获得的患者解剖特征信息以及病患解剖学信息(病灶区域大小、方位、脏器布局等),医生可以此为依据判断患者体表可行的手术切口选择区域及机器人本体与病床的相对位置.由“MicroHand S”系统构型[21]可知,其主动机械臂基座位置可作为机器人关节初始设置的决定因素.优化阶段,首先在可行域内由优化算法随机生成术前包含器械切口坐标及相应机械臂基座坐标在内的个体方案并对该方案进行目标可达性及碰撞干涉检测,不符合要求的方案将被滤除;经过筛选之后对剩余方案的4个指标(VRI、GII、()和R)进行数值计算,并根据所设定的次数进行迭代后得出Pareto解,放入Archive集中不断更新,优化完成后由医生根据实际需求直观地比较不同方案所对应的性能指标数据并进行选择.
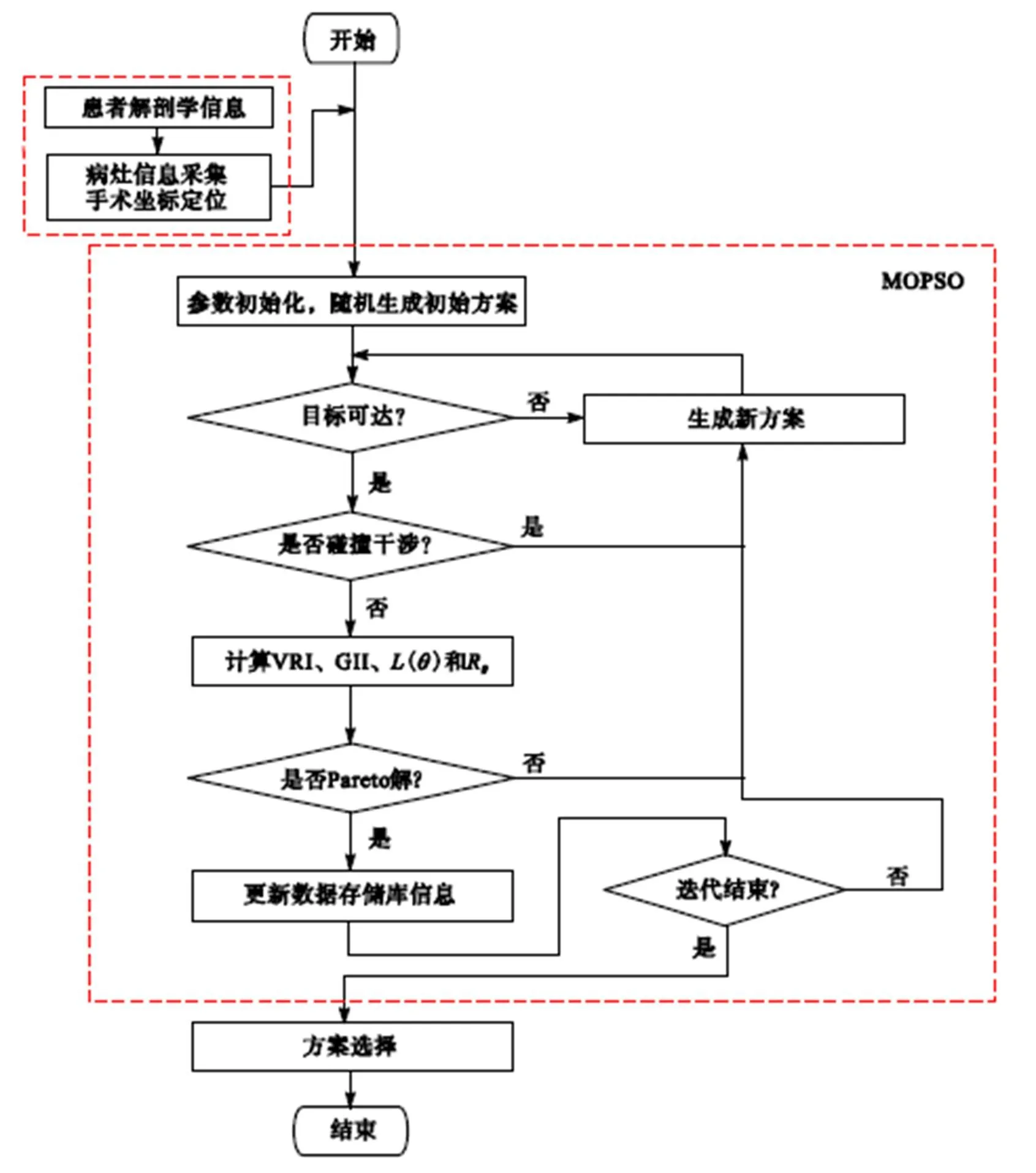
图8 术前规划算法流程
5 算法验证
为验证术前规划算法的有效性并进一步考察所提出优化算法在实际术前规划中的应用情况,本节以“MicroHand S”机器人系统作为应用平台进行实验研究,将由优化算法得出的术前规划方案与有经验的医生根据临床经验推荐的方案进行比较分析.该实验邀请到3位具有丰富机器人临床手术经验的医生参与.实验要求3位医生各自根据自己的临床经验,对同一名需要进行腹腔镜胆囊切除手术的患者进行术前规划,包括在患者体表标定出认为最合理的手术切口位置(2个器械切口及1个内窥镜切口)以及相应的机器人机械臂摆放位置,其结果以坐标形式记录并代入上文所提出的评价指标公式中进行计算,将所得结果与优化算法分析得出的结果进行比较.实验相关参数设置如下.
(1) 首先根据患者解剖特征结合临床经验(如器械切口与内窥镜切口之间所允许的最小距离,器械切口之间的最小距离)来确定手术切口位置的可选择区域,机械臂基座定位可行区域由其运动范围决定,如图9(a)所示.
(2) 对于目标可达性指标(见式(1)~(3)),将目标区域(胆囊)分为××=6×3×3的离散子空间,如图9(b)所示.
(3) 由于手术过程中手术器械的运动存在不确定性,选取靶区6个边界点(图9(b)所示红点)作为式(15)中的采样点.参照Hanna等[29]的研究结果,选取0=60°为器械间最佳操作角度.
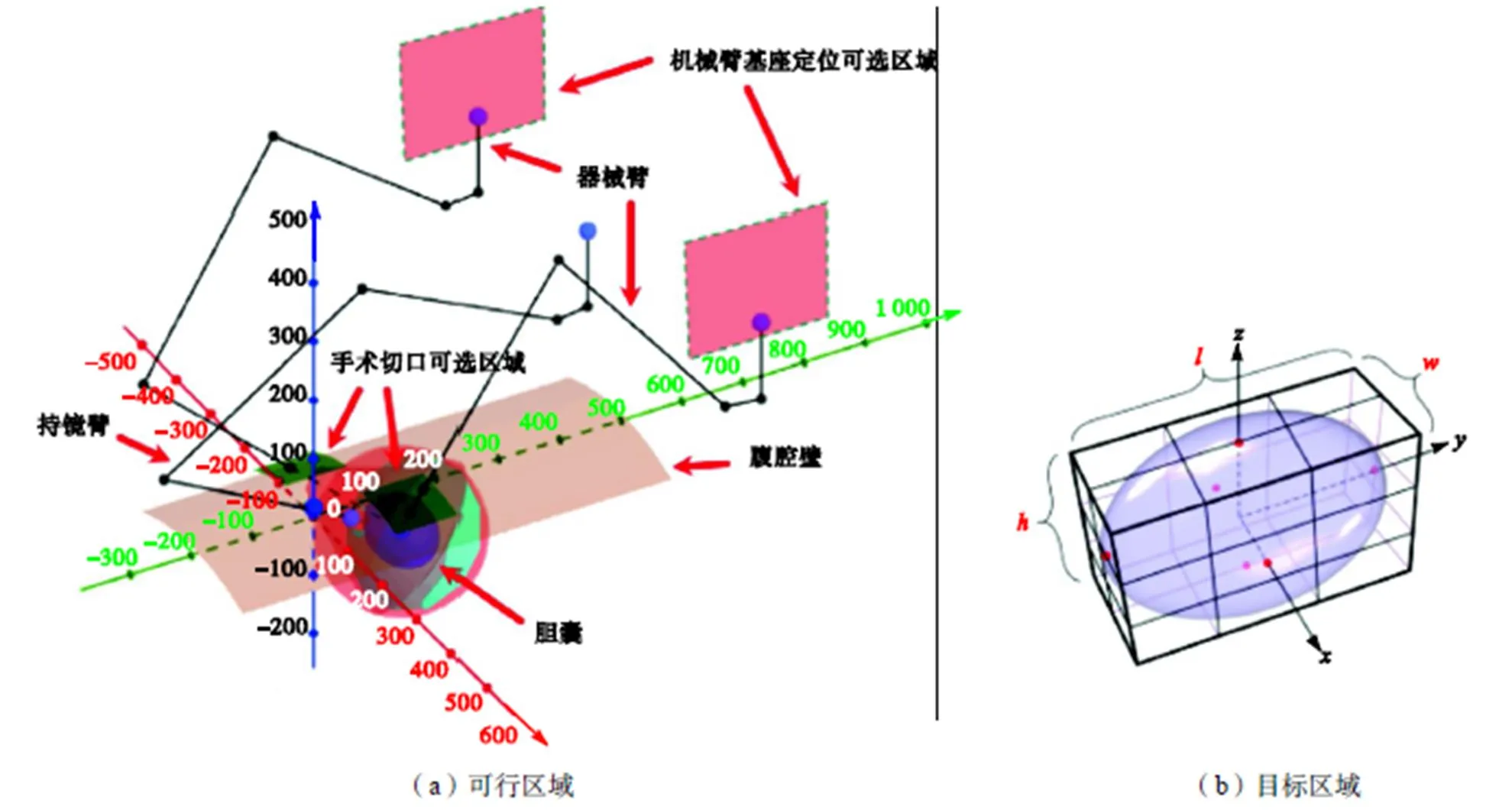
图9 实验坐标系的构建
经MOPSO计算后生成的Pareto解所对应的手术切口位置如图10所示,其中,蓝色点集为左器械可选切口位置,红色点集为右器械可选切口位置.
综合比较实验结果,为避免Pareto非劣解中出现局部极值的情况,优化方案对应的各项性能指标取优异值的同时应处于相对均衡水平;同时,为了使双手操作协调配合,左、右器械灵活性指标应尽量接近.在进行优化计算后所得出的100组Pareto解中经比对分析,设置如下约束条件:①GII>0.03,且|GII(左)-GII(右)|<0.005;②VRI>0.3;③()<0.1;④R<0.4.在此约束条件下,对Pareto非劣解进一步筛选得出8组方案,其对应的性能指标在表1中列出.
最终方案的选取应以操作者可视性与操作灵活性的总体指标(GII(左)+GII(右)+VRI)最大化,同时机械臂关节初始摆位角度与极值偏离程度与手眼协调偏差总体指标(()(左)+()(右)+R)最小化为衡量标准,经对比分析,最终选取第6组方案作为术前规划算法的最优结果,其对应的切口及相应器械臂基座位置坐标如表2所示.
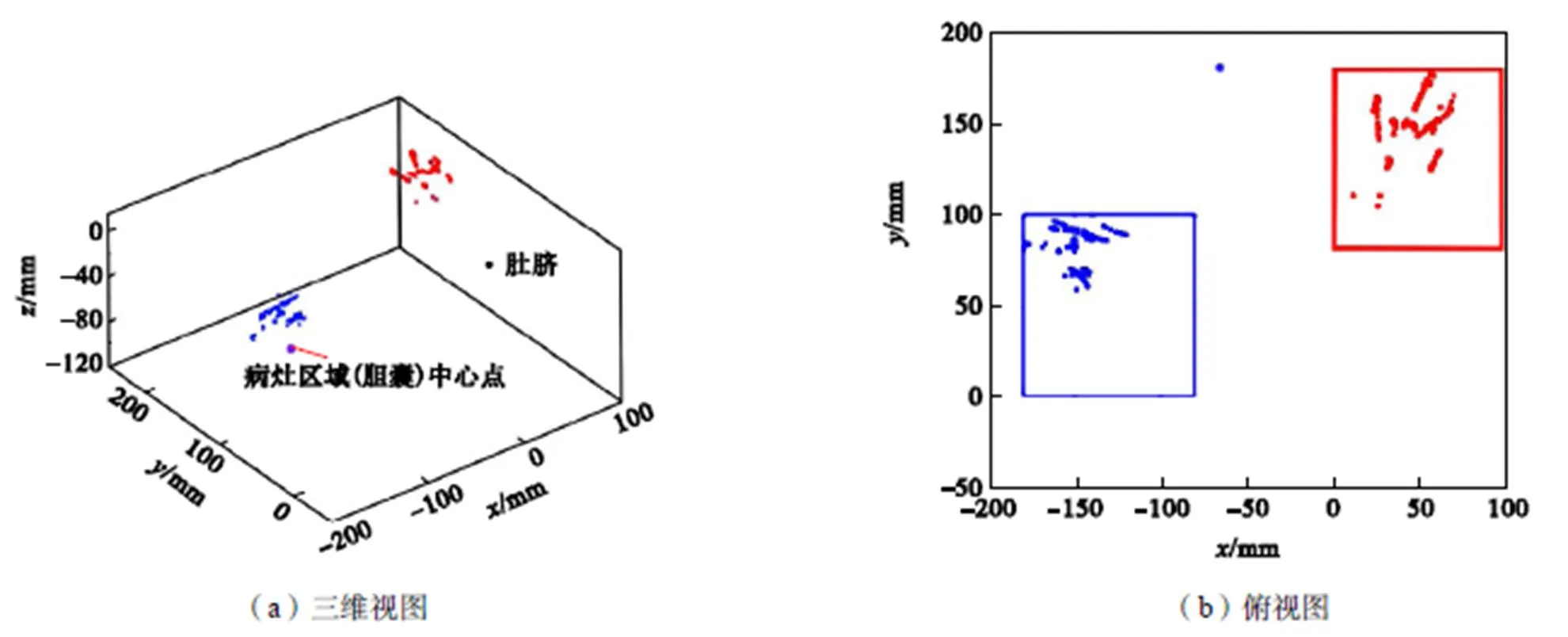
图10 优化结果对应切口位置三维视图与俯视图
表1 Pareto非劣解对应性能指标
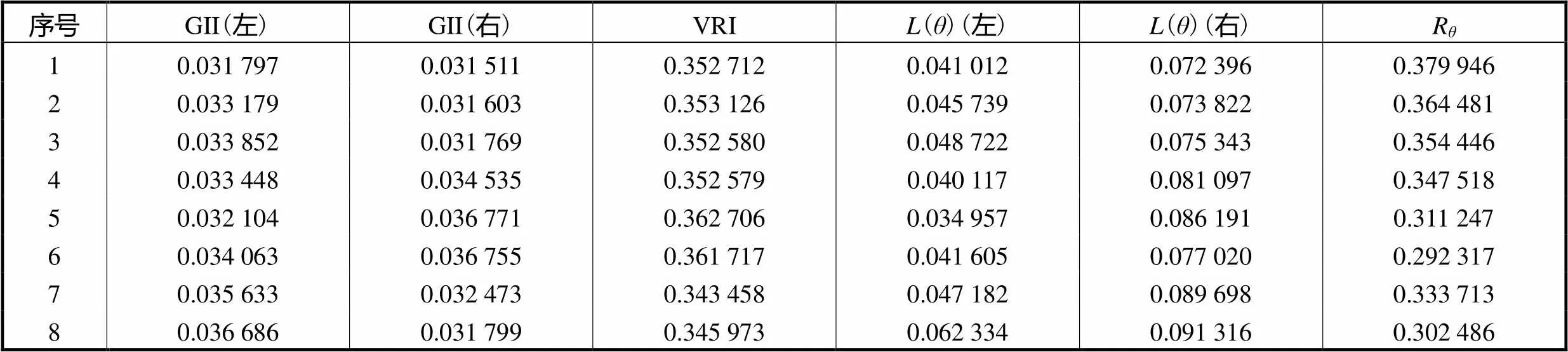
Tab.1 Performance metric for the Pareto non-inferior solution
表2 最终优化方案坐标
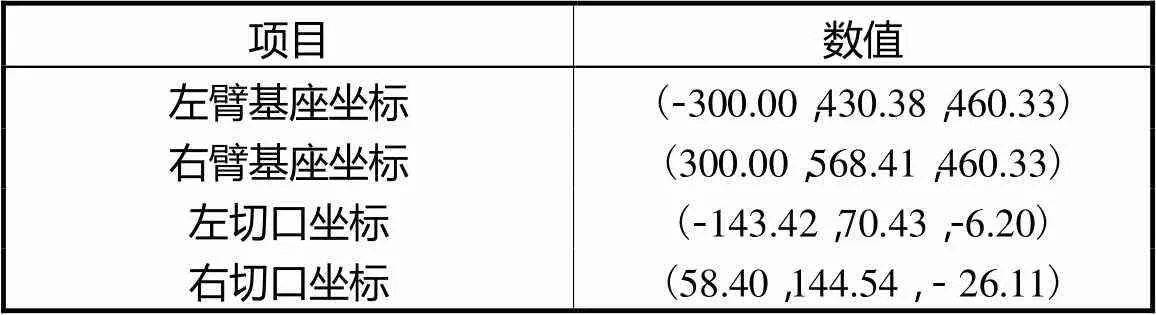
Tab.2 Coordinate values of final optimization solution
将优化算法得到的最终方案与医生由临床经验得出的方案进行评价指标的数值比较,相应的切口位置选择与机械臂摆位对比如图11所示.评价指标对比如表3与图12所示.根据实验结果可知,在第1位实验参与人员所给出的术前规划方案中,虽然右手器械的可操作性及手眼协调性略优于优化算法给出方案(GII(右):0.0368090.036755;R:0.2913650.292317),而机器人对病灶区域的可达性并未达到要求(=87%<100%),且机械臂在工作空间内存在发生碰撞的可能性(<0);在第2位实验参与人员所给出的方案中,左臂关节灵活度略优于优化算法(()(左):0.0415320.041605),但在手术器械工作空间内存在器械与内窥镜发生碰撞干涉的可能(min<1+2);第3位实验参与人员所给出的方案虽达到了目标可达与工作空间内避免碰撞干涉的要求,然而在各性能指标的对比上,优化算法方案明显具有优势.综上可知,相较于临床经验,由优化算法计算分析得出的术前规划可显著提高机器人操作性能,从而可有效增加手术成功率,提高手术质量.
在最终选取方案中,为进一步考察机器人性能指标随切口位置的变化规律,以机器人操作灵活性与可视性为例进行参数可视化分析.
表3 评价指标

Tab.3 Evaluation metrics
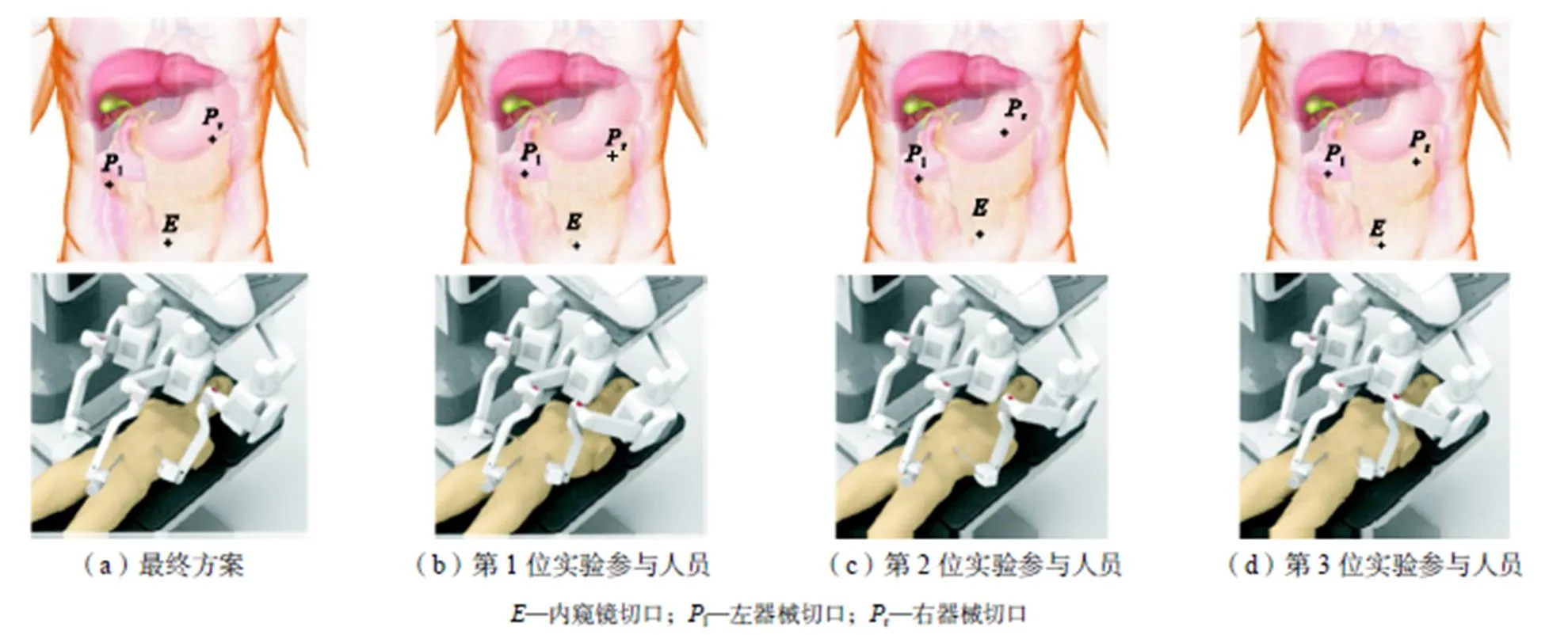
图11 优化算法所得方案与医生推荐方案对比
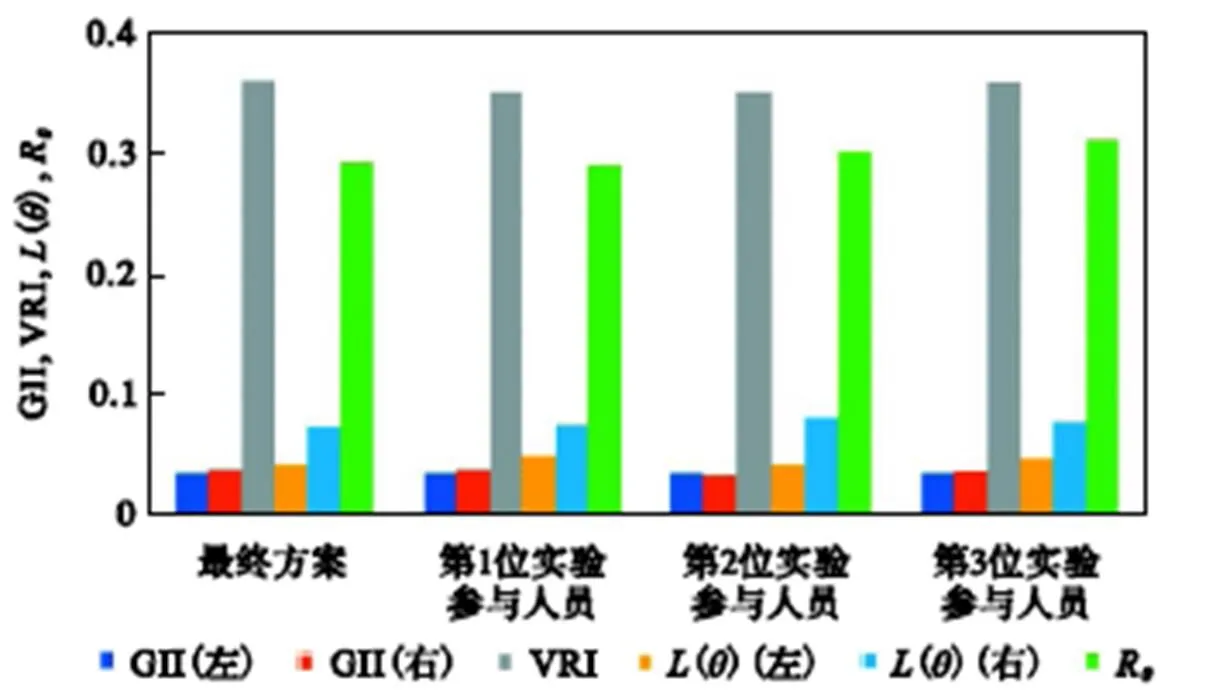
图12 评价指标对比
(1) 首先,使两器械臂基座位置保持固定,左、右器械切口在可选区域内沿轴与轴方向变动时,其对应的GII值如图13与图14所示.

图13 左器械臂对应切口可选区域GII值
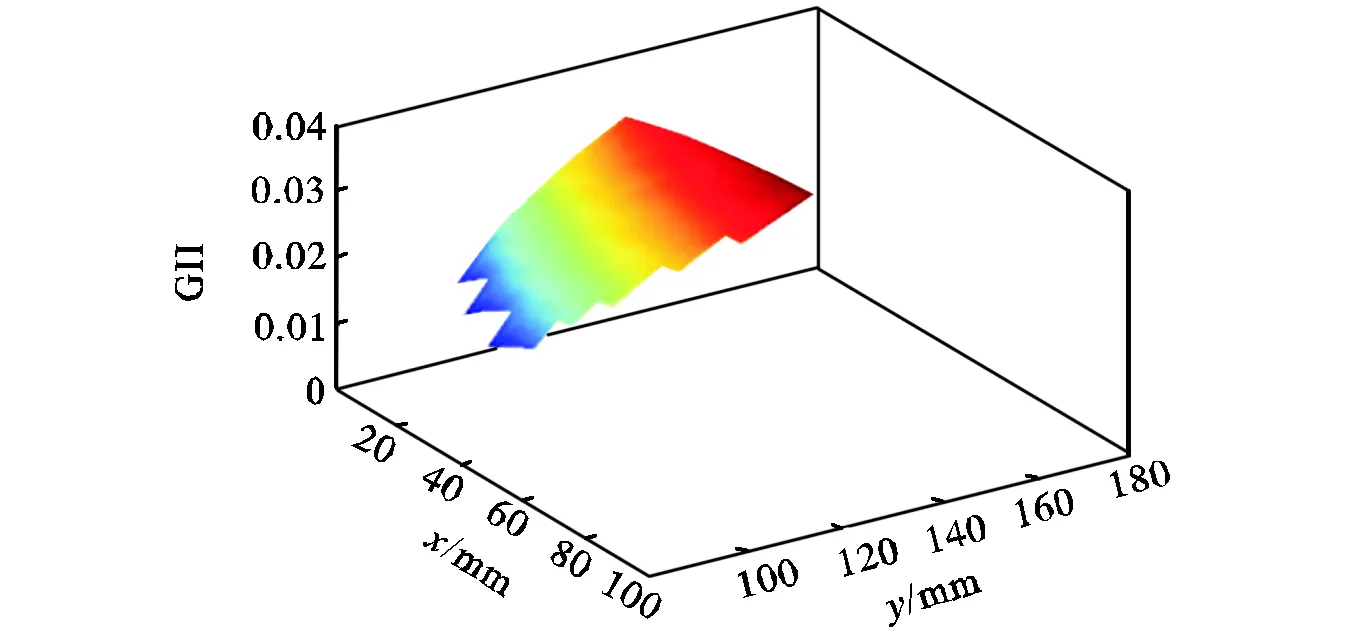
图14 右器械臂对应切口可选区域GII值
(2) 其次,该方案下继续保持器械臂基座位置固定不动,且其中左(或右)器械臂切口位置保持不变,而右(或左)器械臂的切口位置在其对应搜索范围内沿轴与轴方向变化时,可得出相应的VRI值变化趋势如图15及图16所示.
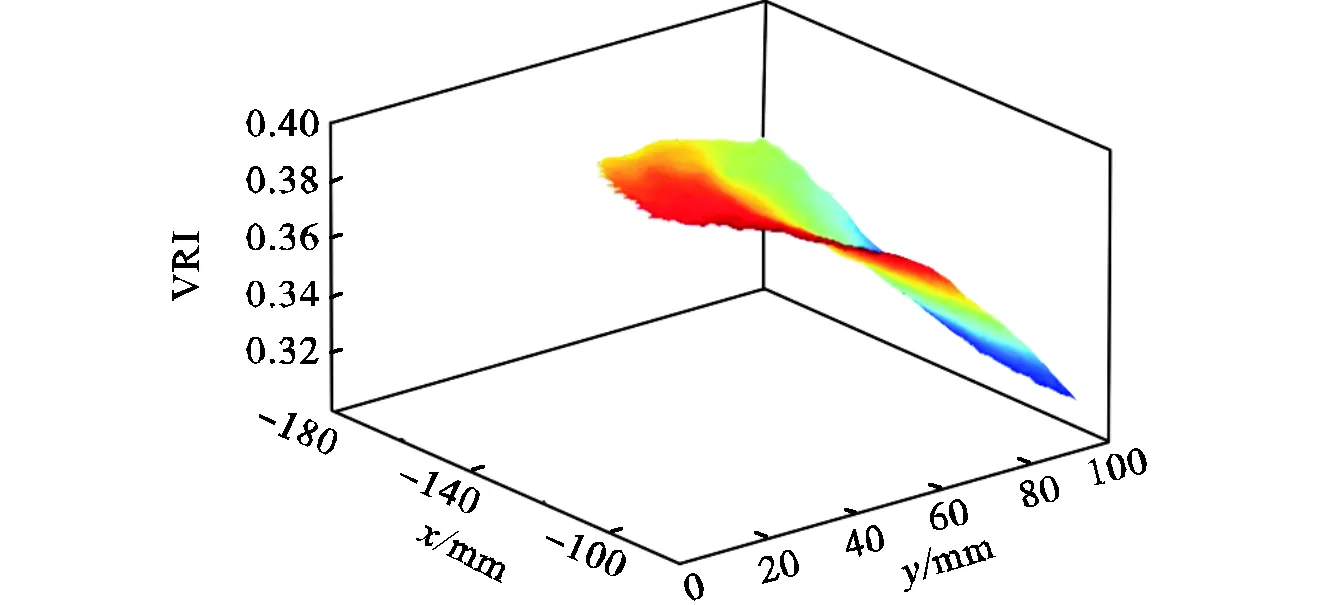
图15 左器械臂对应切口可选区域VRI值

图16 右器械臂对应切口可选区域VRI值
通过实验结果以及考察图13~图16中GII与VRI的变化趋势,再次印证了前文所提出的假设,即各个性能指标之间存在彼此关联并相互制约的关系,因而并不能获得一个使所有指标都达到最佳值的绝对最优方案.
6 结 语
本文针对机器人辅助微创外科手术的术前规划问题展开研究,以腹腔镜胆囊切除术作为分析对象,以优化机器人的操作性能为出发点,并以机器人辅助胆囊切除术作为分析对象,提出了基于MOPSO的多目标优化算法,旨在帮助医生进行合理的术前规划方案制定.
在机器人辅助微创外科手术过程中,目标可达性不足将迫使医生重新选择切口位置,而机器人执行端(包括机械臂及手术器械)的碰撞干涉会导致系统频繁重置,由此影响了手术的进程,此外,不理想的操作灵活性、可视性和手眼协调性均会对手术质量产生影响.通过医生与优化算法分别提供的术前规划方案实验结果的分析对比,一方面验证了该算法在进行机器人辅助微创外科手术术前规划方面的可行性与有效性,为医护人员进行手术切口位置的选取和机械臂初始摆位提供了理论指导方法,另一方面避免了以往仅依靠医生临床的经验进行术前规划的不足,进一步提高了手术操作的安全性.该优化算法的另一个优势在于,可通过计算获得若干个术前规划方案(Pareto非劣解),从而医生可根据实际需求直观地比较各个方案所对应的指标,并进行合理选择.
需要指出的是,当前所提出的术前规划算法是建立在患者体内各器官不发生移位的环境下,若手术过程中器官发生移位,优化效果会受到影响.因此,在保证算法优化效果的前提下增强术前规划算法的鲁棒性,同时通过进一步研究手术需求引入更多的评价指标以完善优化算法,使之更好地适应手术环境不确定性,是今后的主要研究方向.
[1] Trejos A L,Patel R V. Port placement for endoscopic cardiac surgery based on robot dexterity optimization [C]//International Conference on Robotics and Automation. Barcelona,Spain,2005:912-917.
[2] Kappert U,Schneider J,Cichon R,et al. Development of robotic enhanced endoscopic surgery for the treatment of coronary artery disease[J]. Circulation,2001,104(Suppl 1):102-107.
[3] Loulmet D,Carpentier A,d'Attellis N,et al. Endoscopic coronary artery bypass grafting with the aid of robotic assisted instruments[J]. The Journal of Thoracic and Cardiovascular Surgery,1999,118(1):4-10.
[4] Cannon J W,Stoll J A,Selha S D,et al. Port placement planning in robot-assisted coronary artery bypass[J]. IEEE Transactions on Robotics and Automation,2003,19(5):912-917.
[5] Tabaie H A,Reinbolt J A,Graper W P,et al. Endoscopic coronary artery bypass graft(ECABG)procedure with robotic assistance[J]. Journal of Endourology,2004,18(6):572-575.
[6] Cestari A,Buffi N M,Scapaticci E,et al. Simplifying patient positioning and port placement during robotic-assisted laparoscopic prostatectomy[J]. European Urology,2010,57(3):530-533.
[7] Sun L W,van Meer F,Schmid J,et al. Advanced da Vinci surgical system simulator for surgeon training and operation planning[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2007,3(3):245-251.
[8] Hayashibe M,Suzuki N,Hashizume M,et al. Robotic surgery setup simulation with the integration of inverse-kinematics computation and medical imaging[J]. Computer Methods and Programs in Biomedicine,2006,83(1):63-72.
[9] Coste-Manière È,Adhami L,Severac-Bastide R,et al. Optimized port placement for the totally endoscopic coronary artery bypass grafting using the da Vinci robotic system[J]. Experimental Robotics Ⅶ,2000,271:199-208.
[10] Yeniaras E,Deng Z G,Syed M A,et al. A novel virtual reality environment for preoperative planning and simulation of image guided intracardiac surgeries with robotic manipulators[J]. Studies in Health Technology and Informatics,2011,163:716-722.
[11] Park S,Howe R D,Torchiana D F. Virtual fixtures for robotic cardiac surgery[C]//International Conference on Medical Image Computing and Computer-Assisted Intervention. London,UK,2001:1419-1420.
[12] Li M,Ishii M,Taylor R H. Spatial motion constraints using virtual fixtures generated by anatomy[J]. IEEE Transactions on Robotics,2007,23(1):4-19.
[13] Ren J,Patel R V,McIsaac K A,et al. Dynamic 3-D virtual fixtures for minimally invasive beating heart procedures[J]. IEEE Transactions on Medical Imaging,2008,27(8):1061-1070.
[14] Azimian H. Preoperative planning of robotics-assisted minimally invasive cardiac surgery under uncertainty[D]. Ontario,Canada:The University of Western Ontario,2012.
[15] Sun L W,Yeung C K. Port placement and pose selection of the da Vinci surgical system for collision-free intervention based on performance optimization[C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Diego,USA,2007:1951-1956.
[16] Trejos A L,Patel R V,Ross I,et al. Optimizing port placement for robot-assisted minimally invasive cardiac surgery[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2007,3(4):355-364.
[17] Azimian H,Patel R V,Naish M D,et al. A framework for preoperative planning of robotics-assisted minimally invasive cardiac surgery(RAMICS)under geometric uncertainty[C]// Proceedings of IEEE International Conference on Robotics and Automation. Shanghai,China,2011:5018-5023.
[18] Azimian H,Patel R V,Naish M D,et al. A semi-infinite programming approach to preoperative planning of robotic cardiac surgery under geometric uncertainty[J]. IEEE Journal of Biomedical and Health Informatics,2012,17(1):172-182.
[19] 王 伟,王伟东,董 为,等. 基于协作空间与灵巧度的机器人辅助微创手术术前规划算法[J]. 机器人,2016,38(2):208-216.
Wang Wei,Wang Weidong,Dong Wei,et al. A preoperative planning algorithm based on dexterity and collaboration space for the robot-assisted minimally invasive surgery[J]. Robot,2016,38(2):208-216(in Chinese).
[20] 孔 康,王树新,张淮锋,等. 紧凑型微创手术机器人的设计与实现[J]. 天津大学学报:自然科学与工程技术版,2017,50(11):1131-1139.
Kong Kang,Wang Shuxin,Zhang Huaifeng,et al. Design and implementation of a compact minimally invasive surgical robot[J]. Journal of Tianjin University:Science and Technolgoy,2017,50(11):1131-1139 (in Chinese).
[21] Wang W,Li J,Wang S,et al. System design and animal experiment study of a novel minimally invasive surgical robot[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2016,12(1):73-84.
[22] Carbone G,Ottaviano E,Ceccarelli M. An Optimum design procedure for both serial and parallel manipulators[J]. Journal of Mechanical Engineering Science,2007,221(7):829-843.
[23] Rosen J,Brown J,Chang L,et al. The blue DRAGON—A system for measuring the kinematics and the dynamics of minimally invasive surgical tools in-Vivo[C]//Proceedings of the 2002 IEEE/ICRA. Washington,DC,USA,2002:11-15.
[24] 陈智链,孙汉旭,陈 钢,等. 基于碰撞干涉空间的空间机械臂碰撞干涉分析方法研究[EB/OL]. http://www. paper. edu. cn/releasepaper/content/4625647,中国科技论文在线,2015-01-07.
Chen Zhilian,Sun Hanxu,Chen Gang,et al. Collision analysis method for space manipulator based on collision and interference space[EB/OL]. http://www. paper. edu. cn/releasepaper/content/4625647,Sciencepaper Online,2015-01-07(in Chinese).
[25] Gosselin C M. Dexterity indices for planar and spatial robotic manipulators[C]//Proceedings of IEEE International Conference on Robotics and Automation. USA,1990:650-655.
[26] Stocco L,Salcudean S E,Sassani F. Fast constrained global minimax optimization of robot parameters[J]. Robotica,1998,16(6):595-605.
[27] Liegeois A. Automatic supervisory control of the configuration and behavior of multibody mechanisms[J]. IEEE Transactions on Systems,Man and Cybernetics,1977,7(12):868-871.
[28] Coello C A C,Pulido G T,Lechuga M S. Handling multiple objectives with particle swarm optimization[J]. IEEE Transactions on Evolutionary Computation,2004,8(3):256-279.
[29] Hanna G B,Shimi S,Cuschieri A. Optimal port locations for endoscopic intracorporeal knotting[J]. Surgical Endoscopy,1997,11(4):397-401.
Preoperative Planning Algorithm for Robot-Assisted Minimally Invasive Surgery
Liang Ke1, 2,Wang Shuxin1, 2,Liu Ruida1, 2,Li Jianmin1, 2
(1. School of Mechanical Engineering,Tianjin University,Tianjin 300350,China;2. Key Laboratory for Mechanism Theory and Equipment Design of Ministry of Education,Tianjin University,Tianjin 300350,China)
Robot-assisted minimally invasive surgery(RMIS)technology helps surgeons to efficiently overcome the shortcomings associated with traditional MIS technology,extends their ability to perform surgical procedures,and has been widely accepted owing to its good clinical results. A proper preoperative planning for RMIS,although more complicated than that of MIS,can effectively prevent interference between robotic end-effectors and enhance the manipulability,reachability,and visibility of RMIS,which is critical to the outcome of surgical procedures. This study aims to propose an optimization algorithm for preoperative planning based on multi-objective particle swarm optimization(MOPSO)to improve the performance of the robot in combination with our clinical experience and knowledge regarding robot manipulability. We found that the port placements on the patient’s body and the initial robot settings can be reasonably obtained by quantitatively evaluating multiple metrics,including the effective working space,collision and interference detection,the kinematic dexterity of both the robotic arms and end-effector,and hand-eye coordination. To validate the performance of this method,we conducted a robot-assisted laparoscopic cholecystectomy as a case study and used a MicroHand S surgical robot as our experimental equipment. We then compared and analyzed the solutions recommended by experienced surgeons and that by the algorithm for the same patient. The experimental results demonstrate the superiority of the proposed method,which provides an effective way to help surgeons solve the problems that arise when performing surgeries while depending only on clinical experience. Hence,the proposed method improves the safety and efficiency of surgery.
preoperative planning;multi-objective particle swarm optimization(MOPSO);robot-assisted laparoscopic cholecystectomy;MicroHand S system
the National Key Research and Development Program of China(No.2017YFC0110403),the National Natural Science Foundation of China(No.51475323).
TP242.3
A
0493-2137(2019)09-0889-11
2018-09-13;
2018-11-24.
梁 科(1984—),男,博士,lkchina1984@sina.com.
王树新,shuxinlab@163.com.
国家重点研发计划资助项目(2017YFC0110403);国家自然科学基金资助项目(51475323).
10.11784/tdxbz201809039
(责任编辑:金顺爱)
