全角模式半球谐振陀螺振型控制与角度检测
2019-06-12于翔宇张岚昕赵万良
于翔宇, 张岚昕, 段 杰, 赵万良
(1.上海航天控制技术研究所,上海201109;2.上海惯性工程技术研究中心,上海201109)
0 引言
半球谐振陀螺(Hemispherical Resonator Gyroscope,HRG)是一种基于Coriolis效应的振动式陀螺,它依靠薄壳半球状谐振子在转动时的谐振振型状态变化来对陀螺载体的转动动作进行检测。由于半球谐振陀螺具有精度高、寿命长、结构简单、可靠性好等诸多优点,半球谐振陀螺获得了越来越多的关注与应用。
近些年来,随着深空探测、大动态航天器、大动态战术武器等应用平台的日益增多,工业领域的产业升级对高精度仪器设备的需求不断扩大。消费电子领域多元的用户需求需要陀螺在保持精度高、寿命长、可靠性好、价格低廉等特点的基础上,进一步扩大动态范围,并具备直接检测角度的功能[1-3]。
当前,半球谐振陀螺多采用力平衡(Force to Rebalanced,FTR)模式,此模式通过力平衡回路抵消Coriolis力对谐振子进动状态的影响,并通过控制作用的大小表征Coriolis力的大小。根据Coriolis力与转速间的比例关系,可以解算得到陀螺及所在载体的转动速率。虽然这种模式的半球谐振陀螺具有较好的检测精度,但由于受制于力平衡回路的饱和作用,力平衡模式的半球谐振陀螺的动态范围难以获得较大的提高(一般其动态范围在30(°)/s以内)。 同时, 力平衡模式半球谐振陀螺属于角速率陀螺,在无其他导航器对陀螺进行校准且航程较长的应用场景中,使用力平衡模式的半球谐振陀螺检测载体角度会带来较大的累计误差。从目前来看,传统力平衡模式的半球谐振陀螺很难进一步满足未来大动态范围和不依赖于积分运算的角度检测功能的需求。
全角(Whole Angle,WA)模式是一种新型的半球谐振陀螺的工作模式,该工作模式利用谐振子进动角度与载体转动角度呈正比这一物理特性,通过实时解算谐振振型的进动角度来直接读出载体的转动角度,满足了当前直接读出转动角度且不会引入累积误差的应用需求。同时,在全角工作模式中,谐振振型始终处于自由进动状态,所以较之于力平衡模式,其可以获得较大的动态范围,使半球谐振陀螺的动态范围得到显著提高。因此,全角工作模式的半球谐振陀螺可以与力平衡模式的半球谐振陀螺相互补充,扩展半球谐振陀螺的应用范围,满足未来空间探索、航空航海、战术武器、消费电子等多个领域的需求。
本文针对半球谐振陀螺全角模式的振型稳定与角度检测算法进行了研究,通过相干解调的信号解算算法,获得了谐振振型的参数,并通过PI控制器维持了振型的稳定。基于全角模式谐振振型自由进动的特点,通过实时解算谐振振型的进动角度来直接解算陀螺的转动角度。最后,将本文所述的算法和方案在FPGA数字系统上进行了实现。
1 角度解算原理与谐振振型
全角模式的工作原理为:当有角速度输入时,谐振子受到沿着与角速度方向和振动方向均垂直的方向产生的Coriolis力,即有

在Coriolis力的作用下,谐振子振型的转动角度与载体的转动角度相差1个滞后角度θ,我们称θ为进动角或滞后角。进动角与载体转动角度θreal存在固定的比例关系

式中,比例系数k被称为进动因子,k的大小仅与陀螺谐振子的材料和结构有关。当陀螺表头的物理状态确定时,k可被视为常数。在全角工作模式下,一般可通过外部电路在陀螺表头输出的振动信号的基础上进行一系列的处理和解算,最终得到谐振振型的进动角,并用它来表征陀螺所在载体的实时转动角度[4-5]。
当半球谐振陀螺谐振子振动的物理模型被简化为弹簧质量阻尼系统时,其二阶动力学模型[6-7]如式(3)所示
式中,Ω为载体平台转动速度,k为谐振子进动因子,k′为向心力增益系数,ω为陀螺谐振子的固有振动频率,x和y为2个相互正交的信号轴向上的振动信号,fx和fy为从x和y两方向上施加的控制作用。在半球谐振陀螺中,x和y的几何放置位置相差45°。
在式(3)的基础上,通过平均法可以得到陀螺谐振子在x和y位置上的振动位移表达式[8-9]

式中,a和q为谐振振型的长轴和短轴,θ为进动角,x和y为陀螺通过相隔45°的2个电极读出的信号。这2个电极的信号的物理意义是陀螺振动信号向2个电极方向的正交变换,如图1所示。

图1 谐振振型正交分解示意图Fig.1 Orthogonal decomposition diagram of resonant pattern
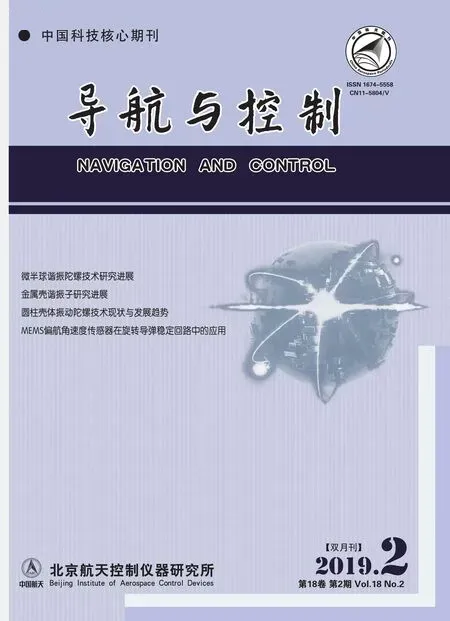
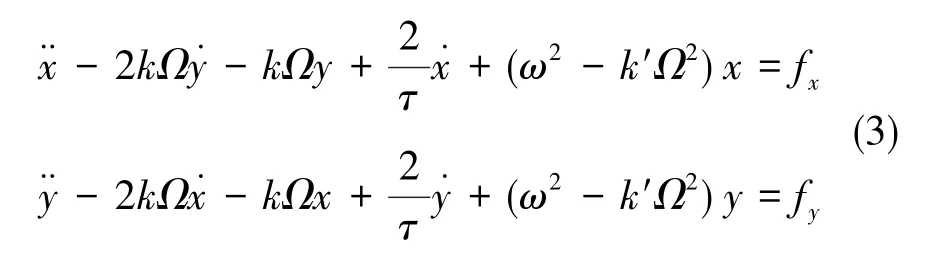
使用Lissajous图这一数学工具来对陀螺谐振子振动位移进行进一步研究,如式(4)所示。当a=5、θ=60°时, 分别绘制q=0、q=1、q=3及q=5的x和y信号的Lissajous图,如图2所示。
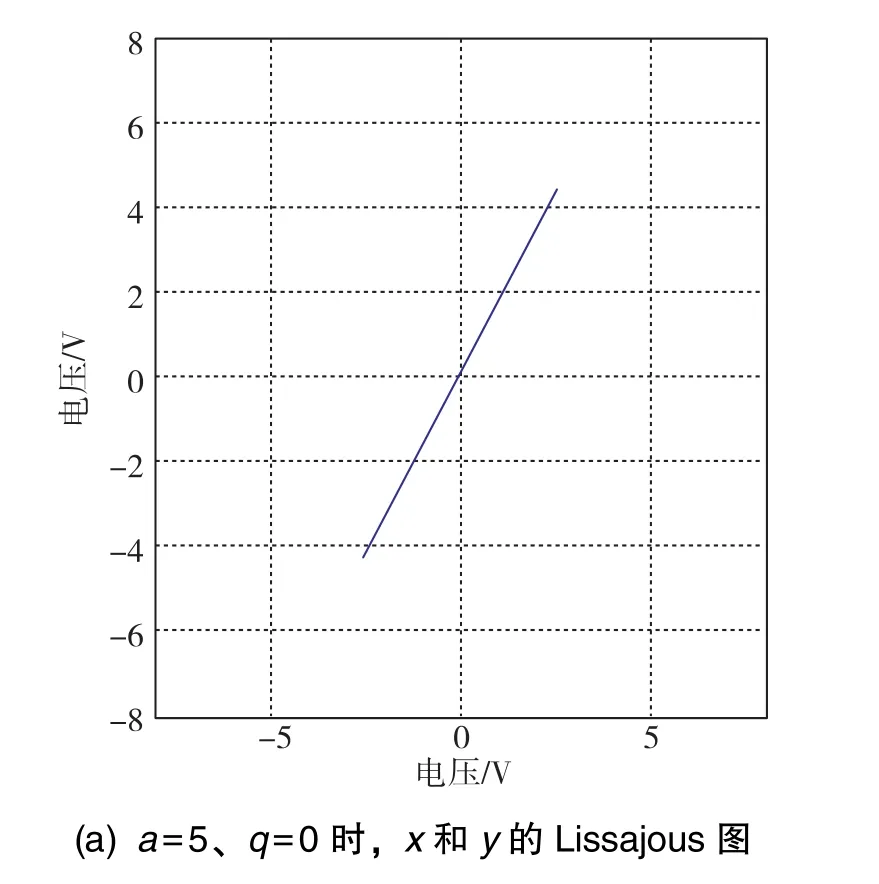
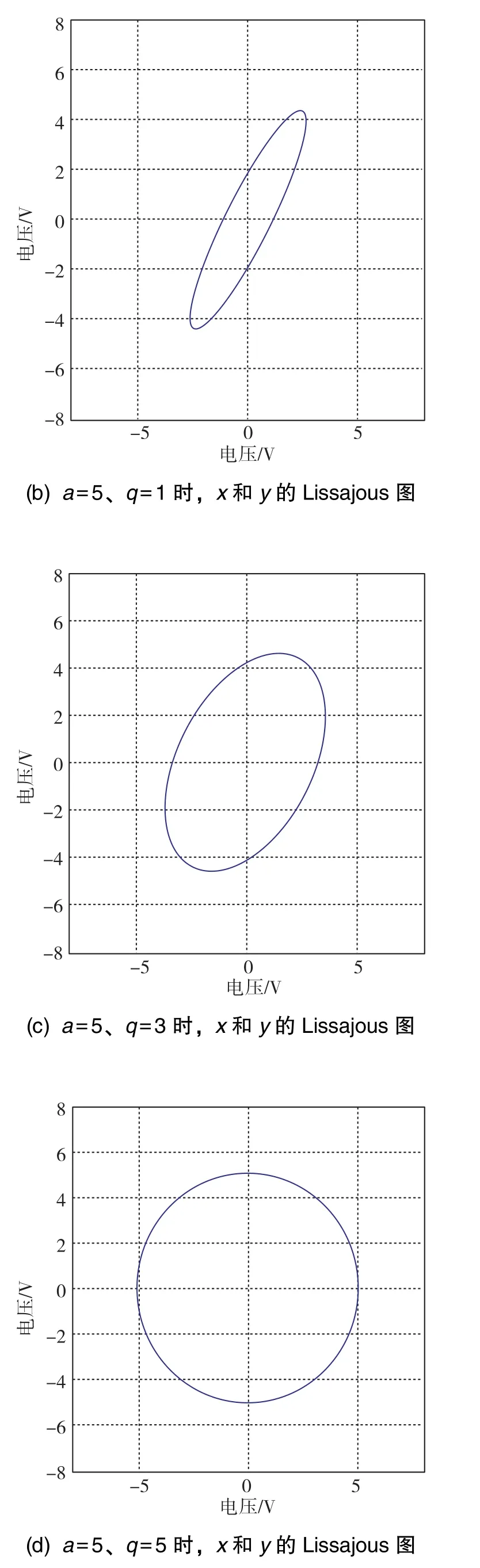
图2 振型q值与振动信号的Lissajous图的关系Fig.2 Relationship between q and Lissajous of vibration signal
当谐振振型的波节点振幅q≠0、波腹点振幅a保持稳定时,x和y信号的相位差随q的逐渐增大而增大。同时,其Lissajous图也由一条直线逐渐变为椭圆,直到q=a时,谐振振型最终变为圆形。
由此可知,q值越大,x和y信号的Lissajous图的离心率越小(亦即Lissajous图的长短轴越接近)。Lissajous图越接近圆型,角度指向的特征就越不明显,通过信号处理获得进动滞后角度的难度就越大。因此,需要控制回路尽量抑制四波腹振型的波节点振幅q,以提高振型进动角度的指向特征,进而提高角度检测的精度。
2 振型的控制与进动角度的解算
对陀螺及陀螺载体的转动角度进行检测和输出,是全角模式半球谐振陀螺的核心功能。同时,为提高角度检测数据的质量,需要按照本文章节1的内容所述,在保持谐振振型波腹点振幅稳定的同时抑制波节点振幅,使之为0。为了将振型参数控制至期望值,需要从式(4)中提取出这些参数,并通过控制回路使之保持稳定。全角模式半球谐振陀螺信号处理与振型控制的过程如图3所示。

图3 全角模式半球谐振陀螺信号处理与振型控制框图Fig.3 Signal processing and mode control block diagram of HRG in WA mode
2.1 低频谐振参数的提取
相对于陀螺输出振动信号,谐振振型参数为低频参数,算法采用乘法相干解调与低通滤波器将低频参数从高频振动信号中提取出来,得到包含谐振参数信息的低频变量。设LPF()为低通滤波器算子,Vc、Vs为锁相环得到的频率跟踪信号,则乘法相干解调的数学过程如式(5)所示
对式(5)中的低频慢变信号进行组合运算,可以得到陀螺谐振状态参数,如式(6)所示
2.2 谐振振型振幅的解算与控制
由于波节点振幅的控制目标值为q=0,且由于谐振子品质因数较高,波腹点振幅参数a的变化较为缓慢,于是可以将式(6)中的参数Q=KQaq作为波节点反馈值。同时,在谐振子波节点振幅已经被控制为0时,对式(6)中的参数E进行开平方运算,便可以解算出谐振振型的波腹点振幅。图4为波节点振幅和波腹点振幅的解算过程的仿真结果。由仿真结果可知,波节点振幅检测信号的2%稳态误差的建立时间小于0.02s,波腹点振幅检测信号的2%稳态误差的建立时间小于 0.016s。
在得到波腹点和波节点振幅参数后,可以通过PI控制器对波腹点和波节点参数进行闭环控制,进而维持谐振振型的稳定。但是,PI控制器的控制作用无法直接施加在谐振子上,这其中的原因主要有如下两点:
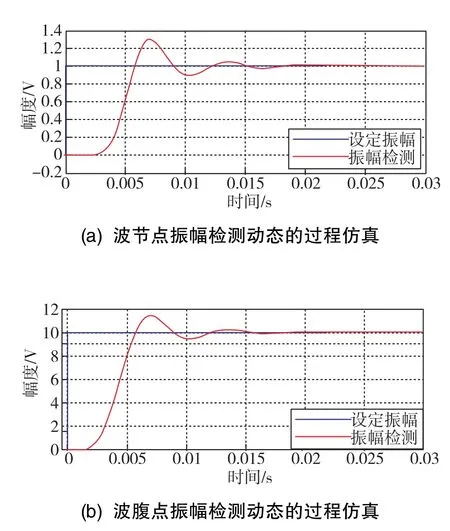
图4波节点和波腹点振幅的解算过程仿真Fig.4 Simulation of calculation of wave node and antinode amplitude
1)谐振振型相对于陀螺及驱动电极的位置呈实时变化,因此无法直接将PI控制器的控制作用施加在谐振子上,而是需要使控制作用 “跟踪”谐振振型的进动角度;
2)谐振信号的频率远远高于控制信号的频率,直接施加控制作用的效率较低。
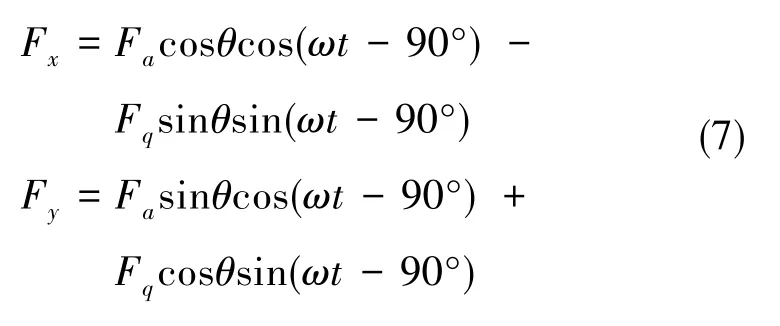
因此,需要通过正交分解将控制作用分别分解到x和y方向上,同时还需要将该控制信号与陀螺谐振频率进行调制,得到驱动作用Fx和Fy, 该过程如式(7)所示
2.3 谐振振型的角度解算
直接对式(4)进行求比值运算与反正切运算,在波节点振幅q被控制为0时,就可以直接得到转动角度。然而,在q值未达到稳态或存在误差时,由于振幅误差耦合的原因,按照此种方法得到的角度解算的结果存在较大的误差。
为了降低振幅误差对角度解算结果的耦合,可以将原方法改为对式(6)中的S和R参数进行求比值与反正切运算,如式(8)所示

在不同的q参数下,对角度解算的仿真结果如图5所示。仿真结果表明,采用式(8)的方法对角度进行解算,在不同的q值下,角度的解算结果相同,故角度解算与q的误差无关。

图5 q参数在不同取值时的角度解算仿真结果Fig.5 Simulation results of angle calculation under different q values
3 全角模式系统硬件的实现
针对章节2所设计的算法,对硬件系统进行设计并加以实现。全角模式半球谐振陀螺系统的硬件结构由信号检测硬件接口、驱动输出硬件接口、基于FPGA的数字硬件系统及辅助外围电路组成。其中,信号检测硬件接口、驱动输出硬件接口两部分属于模拟电路系统,用于实现系统与陀螺表头之间的信号交互;基于FPGA的数字硬件系统为数字电路系统,用于实现陀螺工作流程的控制、数字信号的处理与控制算法的实现及外设通信接口功能;辅助配套电路包括电源模块、通讯芯片、保护隔离器件等。硬件系统的实物如图6所示。
FPGA是全角模式半球谐振陀螺信号处理与控制算法的载体与核心。本文选用Xilinx公司ARTIX系列第7代FPGA产品xc7a35t,在该器件的基础上实现陀螺系统的信号运算、控制与信号交互。FPGA数字系统的功能组成结构如图7所示。
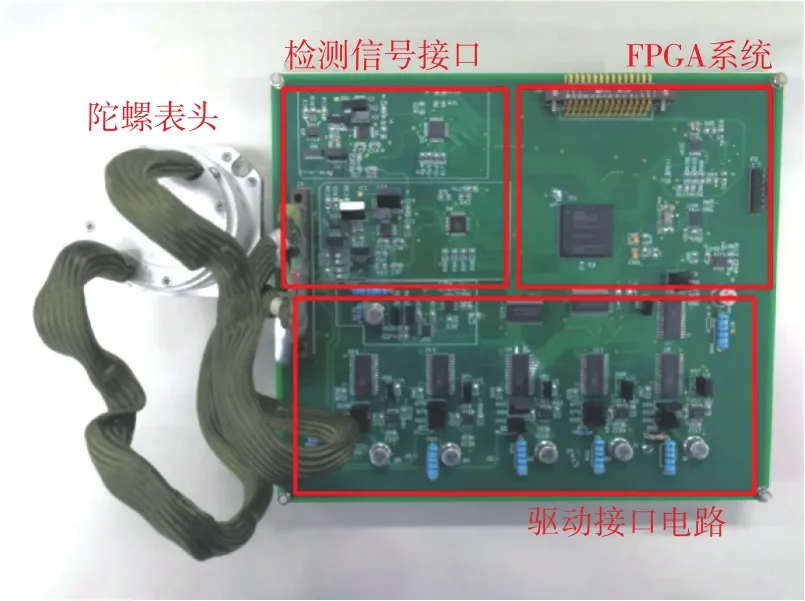
图6 全角模式半球谐振陀螺硬件电路系统Fig.6 Hardware circuit system of WA mode HRG

图7 FPGA数字系统的功能组成结构图Fig.7 Function structure diagram of FPGA digital system
4 系统测试与验证
为验证所设计全角模式半球谐振陀螺系统角度检测输出功能的有效性,搭建测试实验平台对该系统进行了角度检测实验。全角模式半球谐振陀螺实验平台如图8所示。
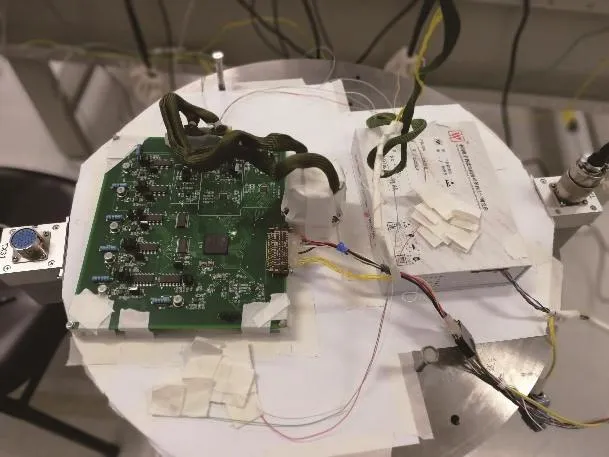
图8 全角模式半球谐振陀螺实验测试平台Fig.8 Experiment test platform for WA mode HRG
在5(°)/s的转速下, 分别使陀螺旋转 30°、45°、 60°、 90°、 120°, 记录测试数据并对其进行数据处理。
将陀螺实际转动角度和陀螺角度输出数字量进行整理,得到的结果如表1所示。对表1中的数据使用一阶函数进行拟合,将得到的数据用曲线在正交直角坐标系中标出,结果如图9所示。
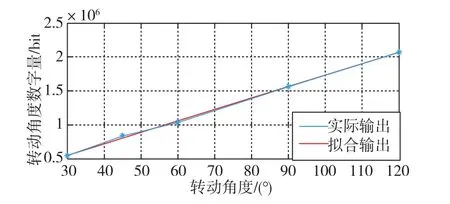
图9 陀螺输出数据及其线性拟合曲线Fig.9 Gyroscope output data and its linear fitting curve

表1 陀螺转动角度和陀螺转动角度数字量Table 1 Rotation angle and output data of gyros
转动角度为A,输出数字量为D,则拟合曲线关系式如式(9)所示

角度检测输出的线性度为0.04,同时测定动态范围为90(°)/s,较之于传统力平衡模式的动态范围有较大提高。
5 结论
本文对全角模式半球谐振陀螺进行了研究,介绍了全角模式半球谐振陀螺控制与信号处理方法,以及全角模式半球谐振陀螺系统的实现。该系统通过谐振振幅参数解算与控制实现振幅稳定,通过实时解算谐振振型的进动角度来直接解算陀螺转动的角度。本文所介绍的全角模式半球谐振陀螺系统能够实现不依赖于积分运算的角度检测功能,较之于力平衡模式的动态范围有了一定程度的提高。