基于无动力储能式辅助采茶的装置设计①
2019-05-28宋甲本王跃彭钱长成万心华尹彬沣
宋甲本 王跃彭 钱长成 潘 丹 万心华 尹彬沣
(扬州大学机械工程学院 江苏扬州225127)
我国茶文化历史悠久,茶业顺应市场需求的发展,茶园面积不断地扩大,茶叶产量迅速地递增,有力地促进了市场经济。这一趋势也使得采茶劳动者数量的增多以及采茶作业量的增大[1]。随着科技发展,大量的研究者试图设计出适用于采茶业的机械装置,帮助劳动者有效地采摘茶叶,减少体耗。
日本本田公司研发出了一种体重支撑步行辅助器,该辅助器结构简单、穿戴方便,可为长期从事一线劳动的员工提供助力,但助力效果有限,且平衡性能较差。中国清华大学研制出减重步行训练机器人,控制系统完善、用途广泛,使用者能够有意识地进行步行训练,但体积大,携带不便,且价格较贵。
本设计为无动力储能式辅助采茶装置,致力于解决茶业中采茶者持久站立劳累以及省力抬腿等问题[2]。采茶者采茶时往往会在一个茶叶生长茂盛的地方站立许久,在需要转移到下一个采茶地点时,容易造成因腿酸、腿麻等而无法轻松抬腿行走。此装置通过分析人体下肢行走步态,在髋骨处设有无动力储能装置模拟大腿的摆动,以提高人体能源利用率。根据对应影响参数设计出储能装置中凸轮的轮廓曲线。同时,优化弹簧刚度并设计弹簧压缩筒来满足人体不同时运动状态所需弹力。
1 装置原理描述
分析人体下肢行走步态,在髋骨设有储能装置来模拟大腿的摆动,提高人体能源利用率。
根据人行走的速度、下肢摆动幅度和步长变化,计算弹簧与推杆的压缩摆动,设计出储能装置中凸轮的轮廓曲线。
为满足人体不同的运动状态对动力需求,设计弹簧压缩筒调节储存力的大小,人站立时可设置弹力释放。基于人体运动,对弹簧刚度进行优化确定。
无动力储能式辅助装置由模块化组成[3],结构包括腰部模块、储能装置、股骨模拟杆组、膝盖绑带和其它链接部件(图1)。其中,储能装置共分为7个构件(图2)。
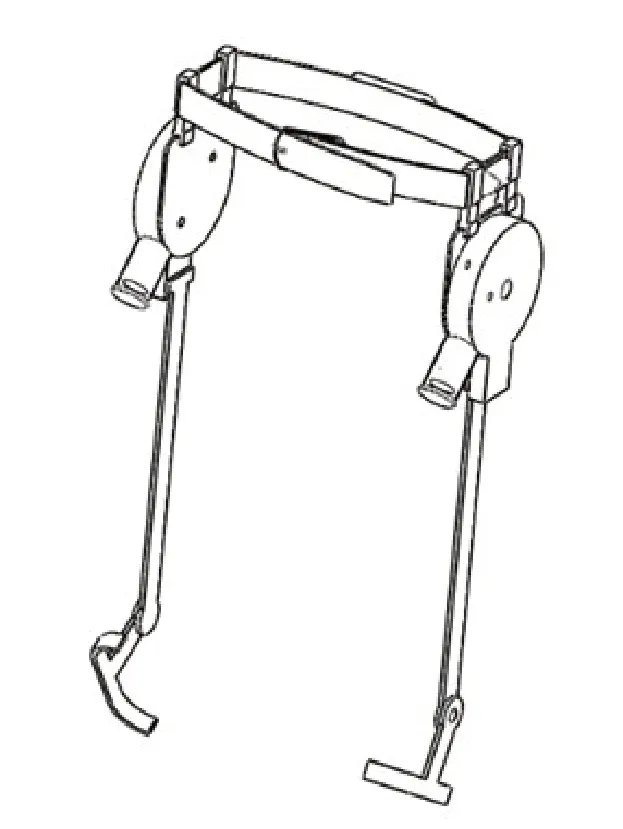
图1 无动力辅助采茶装置

图2 储能装置示意图
当采茶者行走时,股骨模拟杆与壳体一起随大腿旋转,滚子绕凸轮轮廓曲线作周期性旋转,在弹簧推杆的作用下,向下运动,压缩筒内的弹簧被压缩后,将动能转变为弹性势能,起到储能效果。在采茶者抬腿时,弹簧将弹性势能转变为动能,释放能量,推动弹簧推杆和滚子运动,凸轮对壳体的反作用力,可提供抬腿的力,为茶农采茶作业节省体力消耗。
2 运动学分析与相关计算
人行走过程中,可视为每一瞬间均在平面上做铅垂运动,人站立时弹簧处于最大压缩量[5],抬腿行走时进行能量转换,运用机械能守恒有:
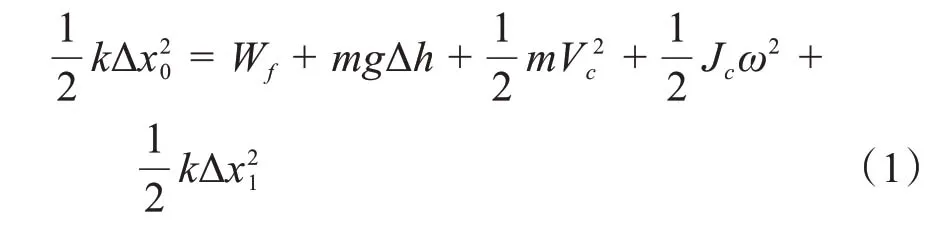
上式(1)中,k为弹簧刚度系数;Δx0为弹簧初始最大压缩量;Wf为综合摩擦与能量耗散,如人与地面或机构内部损耗;m为大腿小腿总质量;Δh为大腿小腿质心上升的距离;Vc为大腿小腿在抬升过程中,任意位置处的质心速度;Jc为大腿小腿的转动惯量;ω为腿部的转动角速度为腿部质心的转动半径;Δx1为腿部上升过程中任意位置处,弹簧的压缩量。
弹簧的压缩量,为推杆行程,即Δx1=S,由推杆行程变化,可计算出凸轮轮廓曲线[4]。在本装置中,主要运用其轮廓曲线中的一部分,满足推杆行程最大最小间的转换即可(图3)。

图3 偏置移动滚子可压缩弹簧推杆盘型凸轮机构
以O 为原点建立直角坐标系,设滚子中心B(x,y),求出凸轮的理论轮廓线方程式:

式中,e为偏距
工作廓线与理论廓线在法线方向的距离应等于滚子半径rr,当已知理论廓线上任意一点时B(x, y),沿着理论轮廓线在该点的法线方向取距离为rr,即得工作廓线上的相应点Bʹ(xʹ,yʹ)。因此可知,理论轮廓线B 点处法线n-n的斜率,应为:
根据式(2)有:


工作廓线上对应点Bʹ(xʹ,yʹ)的坐标为:

此即为凸轮的工作廓线方程式。
3 弹簧刚度优化计算
根据抬腿不同的速度和抬腿不同的高度,选用刚度系数不同的弹簧[6],实验分析结果见表1,由生成的弹簧刚度系数曲线(图4)可知,随着抬腿速度的增高,对应的弹簧刚度降低。因此针对不同采茶人的行走速度,可以选用相应的弹簧规格,达到助力最大化,这一结论为该装置的设计提供了有力保障。
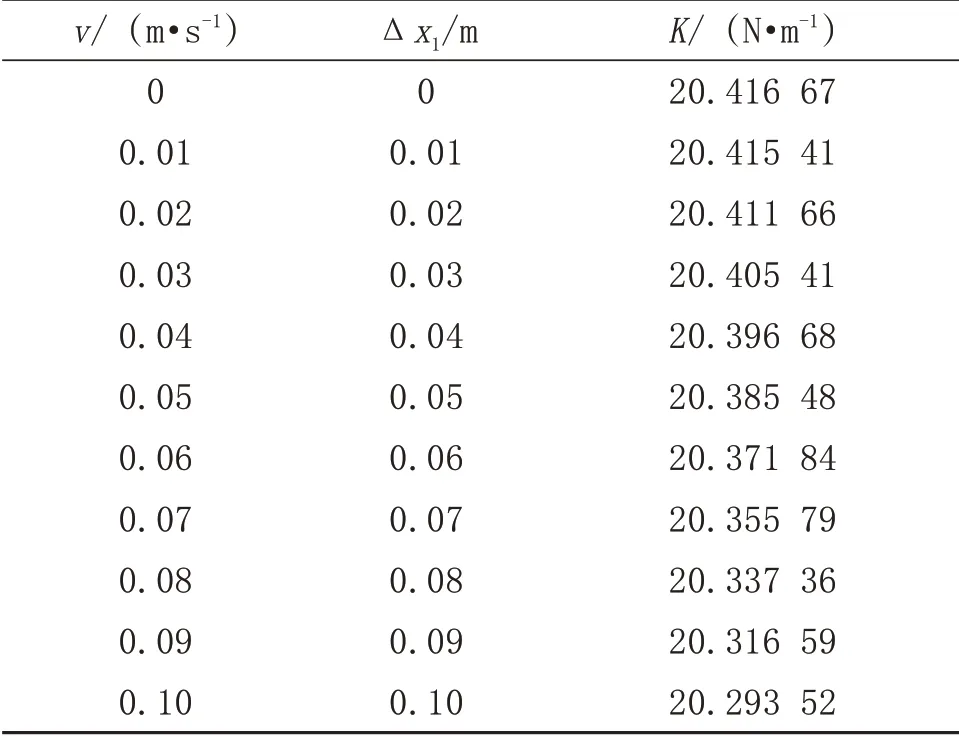
表1 弹簧刚度系数计算数据
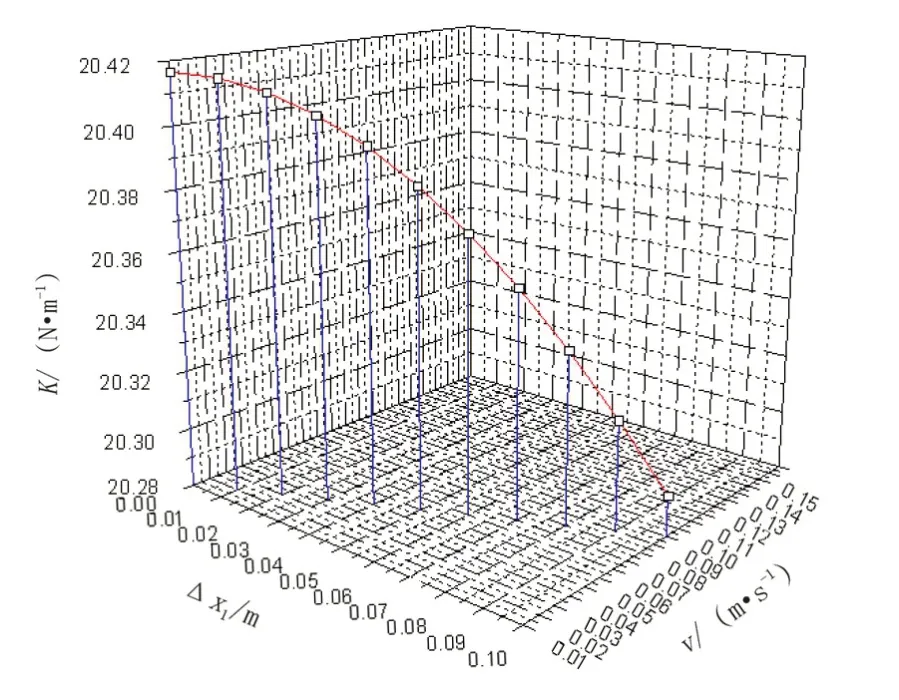
图4 弹簧刚度系数曲线
4 结论
本研究建立人体运动力学模型,根据行走时腿部摆动幅度和速度的大小,得出下肢抬起所需能量。通过对推杆推程与弹簧刚度参数的优化计算,确定凸轮轮廓曲线,分析出弹簧刚度参数,将其运用到无动力辅助采茶的装置中,可有效地解决茶农在长时间采茶作业导致的下肢酸麻、行走乏力的问题。