对GPS接收机的转发欺骗干扰时延控制与运用策略分析*
2019-05-28吴德伟王永庆闫占杰
毛 虎,吴德伟,王永庆,闫占杰
(1 空军工程大学信息与导航学院,西安 710077;2 93864部队,新疆昌吉 831100;3 空军工程大学空管领航学院,西安 710051)
0 引言
随着GPS在军民定位、导航和授时(PNT)领域重要性的日益凸显,针对GPS卫星导航信号的“导航战”受到广泛重视。
卫星导航信号干扰体制可分为:压制干扰和欺骗干扰[1]。自适应天线调零和时频域滤波的普遍采用[2],导致压制干扰的消耗激增,易被反辐射武器探测并攻击;另外,GPS/INS等组合导航的广泛应用[3],使得压制干扰的效率下降明显。由于欺骗干扰在干扰隐蔽性、破坏性和威胁性方面的显著优势,同时考虑到产生式欺骗干扰对码型加密或未公开的军码信号实施难度较大,因此,转发式欺骗干扰逐渐成为关注和研究的热点。
文献[4]、文献[5]讨论了通过控制不同卫星导航信号的时延来实现对目标位置欺骗的方法,给出了真实位置和欺骗位置的映射关系和具体算例,但未深入探讨转发时延取值的约束条件和减小转发时延影响的一般原则。文献[6]、文献[7]分别对单站转发实现区域映射时的转发器位置以及单站与四站转发实现诱偏时的区域映射性能进行了分析,但未涉及单站和四站转发的实际应用场景以及具体实施过程。文献[8-10]对四站转发实现区域映射时的映射比例优化问题进行了研究,但未给出四站转发器部署位置决策的计算方法。
文中首先建立了转发时延约束条件下的控制方法,接着分析了减小钟差影响的一般原则,最后针对GPS的PNT功能,分别就制导武器、无人机和授时接收机在转发欺骗干扰实施过程中的关键问题进行了探讨,以期为实际运用提供借鉴。
1 转发欺骗干扰的时延控制
GPS定位解算方程可看作是伪距测量向量到定位解向量的非线性映射,如果其逆映射存在,那么给定一个期望的位置坐标,就可以找到一个与之对应的伪距测量向量。
1.1 转发时延控制方法
假设在目标真实点R上空有4个转发器Ji(i=1,2,3,4),要迫使接收机错误地定位于虚拟点F,则转发器的位置和时延需满足:
(1)
式中:RSiF(i=1,2,3,4)为虚拟点到各卫星的距离;RSiJi(i=1,2,3,4)为卫星到转发器的距离;RJiR(i=1,2,3,4)为转发器到目标真实点的距离;∂ti(i=1,2,3,4)为各转发器所加入的独立时延;c为光速。∂ti的解可表示为:
(2)
式中:di=[(RSiF-RSiJi-RJiR)-(RS4F-RS4J4-RJ4R)]/c。通过地面监测站对卫星星历的监测和转发器位置可获得RSiF、RSiJi和RJiR,进而根据式(2)调整∂ti使式(1)成立。
式(2)中的变量数大于方程数,故一定有不唯一解。为了满足物理可实现条件,要求∂ti≥0,可通过比较d1、d2、d3的大小来确定出∂t4,具体过程为:如果d1≤d2且d1≤d3,则∂t4=-d1;如果d2≤d1且d2≤d3,则∂t4=-d2;如果d3≤d1且d3≤d2,则∂t4=-d3;如果∂t4<0,则∂t4=0。另外,考虑到对运动目标的连续转发欺骗,∂ti还应有取值上限的约束。以跟踪P(Y)码信号为例,要求∂ti的变化范围不得超过1.5Tc(Tc为伪码码元宽度),因此,∂ti的最小取值范围为0≤∂ti≤1.5×10-7s,则由式(2)可得∂t4的取值要满足式(3)的交集。
(3)
若∂t4在式(3)的交集范围内任意取值,很有可能造成解算出的∂ti(i=1,2,3)出现超出其取值范围的情况。当存有取值为负的∂ti时,则需要对所有的∂ti加上一个修正时间T=-min(∂ti),这就有可能使原本在值域范围内的∂ti超出值域上限,因此,可给出如下的∂ti取值准则:
(4)
由式(2)可得d1+d2+d3+4∂t4≥0,根据式(4)的取值准则,可采用∂t4=-(d1+d2+d3)/4来求出∂t4,当∂t4在式(3)确定的取值范围内时,代入式(2)中可求得∂ti(i=1,2,3),并根据∂ti自身的取值范围对其进行约束;当∂t4不满足式(3)确定的取值范围要求时,则根据式(3)的值域约束条件取min(∂t4)或max(∂t4),再对∂ti(i=1,2,3)进行求解。若采用单站转发,可看作是四站转发的一种特殊情形,令Ji(i=1,2,3,4)位置彼此相等即可同样采用上述转发时延控制方法进行∂ti的计算。
1.2 对接收机钟差的影响
对4颗参与定位解算的卫星信号加入不同的转发时延,在改变接收机定位位置的同时,还会使接收机解算钟差误差增大。钟差大的“跳变”会被接收机所识别,在目标真实点到虚拟点的转发诱偏过程中,接收机钟差变化情况为:
(5)
式中:tR是接收真实卫星信号时的解算钟差;t′R是接收转发欺骗信号时的解算钟差;t″R是接收机被诱偏定位于虚拟点时的解算钟差。由式(5)可进一步得到:
(6)
从式(6)可以看出,钟差变化大小与目标真实点和虚拟点的位置以及所加入的转发时延有关。将式(6)中的∂ti用di+∂t4等价代换后可得:
t″R=tR+[(RSiR-RSiJi-RJiR)-(RS4F-RS4J4-RJ4R)]/c+∂t4
(7)
在此基础上,考虑两种特殊情形对式(6)的影响:①转发诱偏不会对钟差造成影响,即:RSiR=RSiF-c∂ti;②转发诱偏只会对钟差造成影响(虚拟点与真实点重合),即:t″R=tR+∂ti。根据上述①、②和式(6)、式(7)可得到:减小转发诱偏对钟差的影响,要尽可能使|RSiR-RSiF|≈0、|RSiR-RSiJi-RJiR|≈0和|RSiF-RSiJi-RJiR|≈0(i=1,2,3,4,且可让RS4F略大于RS4J4+RJ4R来进一步减小转发时延修正值的影响),再结合RSiR≤RSiJi+RJiR(i=1,2,3,4)的几何关系,转发器应尽量部署于靠近转发卫星与目标真实点的连线上。
根据文献[5]给出的转发卫星、四站转发器、目标真实点和虚拟点在ECEF坐标系下的位置参数,计算相应的RSiR、RSiJi+RJiR和RSiF(i=1,2,3,4)值分别为[20 267.99 21 343.77 20 641.28 20 378.24]、[20 270.97 21 750.33 20 871.69 20 582.87]和[20 270.96 21 750.32 20 871.64 20 582.91],单位为km,符合上述得出的减小对接收机钟差影响的转发器位置部署一般原则,利用1.1节转发时延控制方法,可得到对各卫星的转发时延都在10-10s数量级,即使对M码信号连续转发时延0≤∂ti≤5×10-8s的要求也同样可以满足;而钟差都在10-7s数量级,远小于一般接收机±1 ms的钟差值域范围。
假设只采用文献[5]中的转发器3进行单站转发诱偏,利用1.1节转发时延控制方法可得到对4路卫星信号加入的∂ti(i=1,2,3,4)分别为[0 9.274×10-75.234×10-71.440×10-6],单位:s,四路单站转发信号对应的钟差解算值分别为[-6.822×10-72.452×10-7-1.588×10-77.578×10-7],单位:s。由于单站转发器不能同时满足位于各转发卫星与目标真实点的连线上,因而与四站转发相比,映射到相同虚拟点时所需的转发时延增加明显,已经超出对P(Y)码信号连续转发欺骗时的转发时延最小取值范围。尽管此时的解算钟差仍在±1 ms的钟差值域范围内,但由式(5)可以看出,tR到t′R的变化量不再近似相等,与四站转发相比,各路钟差解算值相对变化较大,这也易被接收机所“察觉”。
考虑到转发器位置可能发生变化,因此,在上述分析过程中,假设转发器与卫星之间也存在钟差,即式(5)中的t′R与tR为不同值。若转发器位置固定设置,对于干扰方而言是已知确定量,在获得卫星位置信息后,可以得到加入转发时延后的卫星信号真实传播距离,即
∂ti=[RSiF-(RSiJi+RJiR)]/c
(8)
此时虚拟点的等效伪距测量值为:
ρ″i=RSiJi+RJiR+c∂ti+ct″R
(9)
由式(8)可以看出,当RSiJi+RJiR>RSiF时,∂ti<0,需将∂ti修正为∂t′i=∂ti+|min(∂ti)|,这部分修正量会叠加到钟差的变化上。为了降低对钟差的影响,应尽量减小RSiJi+RJiR之和,这样就可以扩大不产生钟差叠加的虚拟点选择范围,因此,对于考虑转发器与卫星存在钟差时的转发器位置部署一般原则也同样适用于此种情况。
∂ti(i=1,2,3,4)都属于人为可控的主动时延,而实际的转发干扰系统还应有一定的转发处理被动时延ts(ts>0且可以被精确标定),因此,若min(∂ti)>ts,可将∂ti统一减小ts;若0≤min(∂ti)≤ts,可将∂ti统一减小min(∂ti),从而进一步降低对接收机钟差的影响。
2 转发欺骗干扰的具体运用
分别以制导武器、无人机和GPS授时接收机为干扰目标,分析解决转发欺骗干扰在具体实施过程中的关键问题。
2.1 针对制导武器的固定四站转发平台位置决策
为了实现对制导武器的连续隐蔽诱偏,需要通过分析目标真实点到虚拟点的邻域映射情况,并以此来决策转发器的部署位置。对目标真实点R邻域上的一点
为以R为球心的球半径)到虚拟点F邻域上一点F′(XF+ΔXF,YF+ΔYF,ZF+ΔZF)的映射情况进行分析,采用固定四站转发平台进行转发诱偏,则由式(1)可得:
RSiF′-RS(i+1)F′=RSiJi+RJiR′+c∂ti-RS(i+1)J(i+1)-
RJ(i+1)R′-c∂t(i+1),i=1,2,3
(10)
对式(10)的等号左端在虚拟点F(XF,YF,ZF)处进行泰勒级数展开可得:
(11)
将式(11)代入式(10),则式(10)可用矩阵形式表示为:
(12)
式中:


(13)


(14)
由于R′∈Ω(R),因此RJiR ′+RJ(i+1)R ′≈RJiR+RJ(i+1)R,则式(14)可近似表示为:
(15)
同理,对RJiF′-RJ(i+1)F′也进行上述推导,则式(12)可重新写成:
(16)
其中:

由于B″中各元素分子和分母都包含有转发器的位置参数,若将其与A″中的对应元素联立求解方程组,计算过于复杂。在1.1节的转发时延控制方法中,为了能尽量减小对接收机解算钟差的影响,选择的虚拟点不会离目标真实点过远,而GPS卫星处于离地面约20 200 km的高空,因此,在ΔRSiF中有RSiF≈RSiR(i=1,2,3,4),将该条件代入A″中,可发现若转发器位于对应转发卫星和目标真实点的连线上,且满足
(17)
即各转发卫星和目标真实点到对应转发器的距离成等比例时,目标真实点邻域能被高保形地映射到虚拟点邻域。易得此时固定四站转发器的位置坐标为:
(18)
可以看出,上述决策方法得到的固定四站转发器部署位置坐标,与文献[8]、文献[9]给出的使四站转发器位置靠近且在彼此分布形状不变情况下尽量远离目标真实点可以优化映射比例因子的定性结论在本质上是相一致的。
采用文献[5]中的转发卫星、目标真实点和虚拟点在ECEF坐标下的位置参数,利用上述决策方法对固定四站转发器位置进行优化,优化前后的转发器位置坐标如表1所示。
将目标真实点邻域设置为以目标真实点为球心,半径r=10 km的球体,在表1给出的两组转发器位置坐标下的真实点邻域映射情况如图1所示。
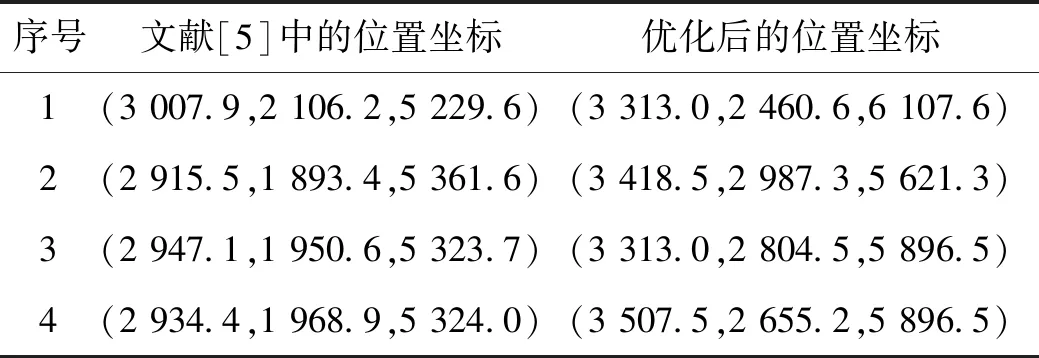
表1 优化前后的转发器位置坐标 km
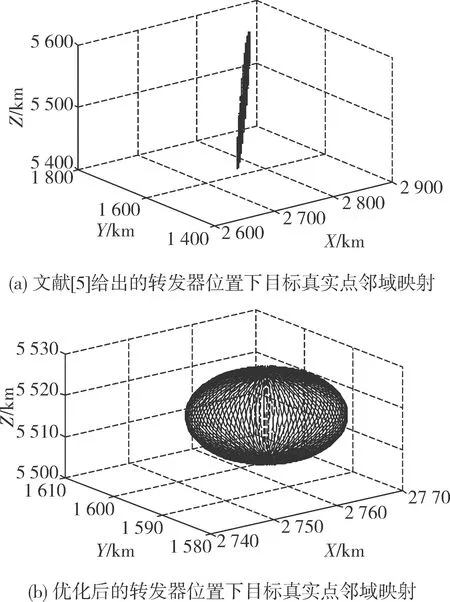
图1 目标真实点邻域映射情况
对比图1(a)和图1(b)可以看出:在文献[5]给出的转发器位置下,目标真实点邻域经过映射后变为一个椭球;而在优化后的转发器位置下,目标真实点邻域经过映射后仍为一个球体。定量计算后可以发现:图1(a)对应的Kmax=14.717 7、Kmin=0.085 9,接收机钟差最大变化量为4.507×10-4s;而图1(b)对应的Kmax=1.044 2、Kmin=0.996 6,接收机钟差最大变化量为1.595×10-6s。
设目标在真实点附近运动,其运动轨迹方程为:

(19)
为了方便观察目标运动轨迹映射后有无形变,令目标真实点与虚拟点初始重合,取t=0:0.01:1,在表1给出的两组转发器位置坐标下目标运动轨迹映射后的情况如图2所示。
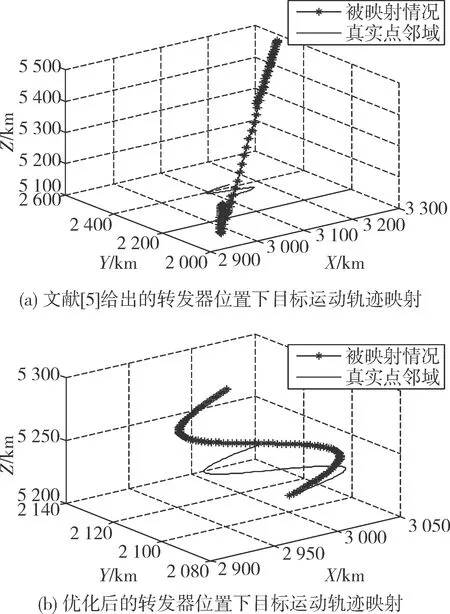
图2 干扰目标运动轨迹映射情况
对比图2(a)和图2(b)可以看出:在文献[5]给出的转发器位置下,目标在真实点附近的运动轨迹映射后形变严重;而在优化后的转发器位置下,目标在真实点附近的运动轨迹映射后形状基本不变。
2.2 针对无人机的移动单站转发欺骗过程推想
移动单站转发可有效克服固定四站转发覆盖范围和机动性受限的不足,根据1.2节得出的尽量将转发器部署于转发卫星与目标真实点连线上的分析结论,由于参与定位的4路卫星信号的交点位于干扰目标的接收天线处,因此,可设想采用贴近干扰目标上方的移动单站伴飞转发干扰来实现对无人机的牵引欺骗,其过程如图3所示。
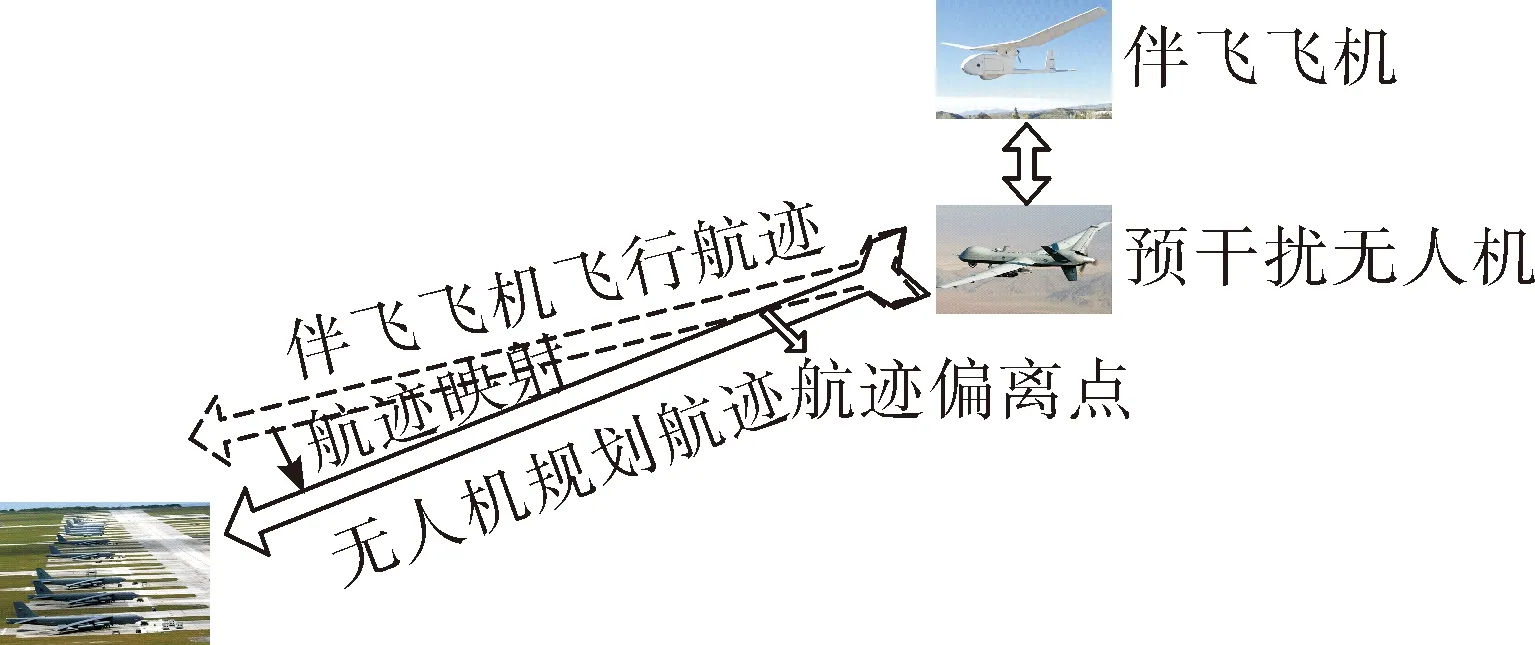
图3 对无人机的移动单站伴飞转发欺骗过程示意
在图3中假设干扰方已获取了无人机的规划航迹,并利用压制干扰等手段而迫使无人机只能捕获到来自伴飞飞机的转发卫星信号,伴飞飞机在贴近无人机后,首先选择转发卫星信号并进行不加人为延时的转发处理(忽略伴飞飞机接收端到发射端的链路时延),并让伴飞飞机也沿着无人机的规划航迹飞行。无人机采用接收到的转发卫星信号解算得出的位置实际为伴飞飞机位置(真实航迹点的邻域也都映射到伴飞飞机位置上),但由于两者贴近,因此,无人机不会“察觉”出欺骗存在,伴飞飞机牵引着无人机在其规划航迹上飞行,此时的无人机实际上已经受到“欺骗”,只不过“欺骗”航迹与规划航迹相一致而已。伴飞飞机沿着无人机的规划航迹飞行一段时间后,在某点开始逐点偏离无人机的规划航迹,无人机由于已被伴飞飞机所牵引,也随之偏离自身规划航迹,当偏离误差超过一定的门限值时,无人机上的自主飞控系统开始对航迹进行修正,这时,伴飞飞机加入转发时延,将其自身的飞行航迹逐点映射到无人机的规划航迹上,则无人机卫导系统仍显示的是正确规划航迹,但实际上已被伴飞飞机牵引至预定点。
由于伴飞飞机对无人机是航迹逐点牵引偏离,因此,无人机的解算位置和钟差不会产生明显跳变,不易被惯导、高度表等设备所识别。贴近伴飞使得式(5)中的t′R=tR,需要修正转发时延的规划航迹范围减小,若根据获取的无人机规划航迹对伴飞飞机的航迹进行优化预处理,使得在航迹偏离点到牵引预定点的伴飞航迹上,满足卫星到映射的规划航迹点距离大于卫星到伴飞飞机接收天线距离,或至少保证加入的转发时延修正量在接收机钟差的值域范围内,采用1.1节的转发时延控制方法,能够对无人机进行隐蔽牵引欺骗。
2.3 针对授时接收机的转发干扰时延分析
GPS授时接收机一般都安装在固定位置,且带有位置校验[11],因此,可通过对授时接收机的伪距测量值加入相同的增量来增加授时误差。不失一般性,设转发干扰系统时钟与授时接收机时钟相对系统时的偏差相等,且转发干扰系统的位置已知,则可得到如下授时转发欺骗干扰方程组:
(20)

3 结束语
在建立约束取值条件下转发时延控制方法的基础上,分析得出将转发器部署于转发卫星与目标真实点的连线上可减小对接收机钟差解算影响的一般原则。针对制导武器的固定四站转发干扰,将转发器部署于转发卫星与目标真实点的连线上且满足各转发卫星和目标真实点到对应转发器的距离成等比例时,转发诱偏的隐蔽性和可控性较好。针对无人机的移动单站转发干扰,可在获知无人机规划航迹的前提下,采用贴近伴飞的方式实施自身飞行航迹到无人机规划航迹的逐点映射转发诱偏。最后针对GPS授时接收机的转发干扰,对其实现方法和可行性进行了分析说明。
