基于RID算法的机动目标认知成像方法*
2019-05-28田泰方龚逸帅孙玉雪
田泰方,张 群,龚逸帅,孙玉雪
(1 空军工程大学信息与导航学院,西安 710077;2 95561部队,拉萨 850000;3 94940部队,江西九江 332100)
0 引言
早期的ISAR技术研究中,假设目标做平稳匀速运动,采用的一种基本方法是距离-多普勒(range-Doppler,RD)算法[1]。实际中目标的运动往往非平稳,这使得传统的RD算法失效。针对这一问题,文献[2]提出了一种面向机动目标ISAR成像的距离-瞬时多普勒(range-instantaneous Doppler,RID)算法,采用时频分析的方法代替传统的傅里叶变换,得到慢时间下的瞬时多普勒谱。2006年S.Haykin提出了“认知雷达”的概念[3],建立了雷达与外界环境的闭环反馈结构,从而提升了雷达的自适应能力。文献[4]提出了一种MIMO雷达认知波形设计方法,利用有限的发射信号带宽完成了目标高分辨成像;文献[5]提出基于认知成像的雷达资源调度算法,提升了雷达工作效率。然而以上方法均假设目标做平稳运动。
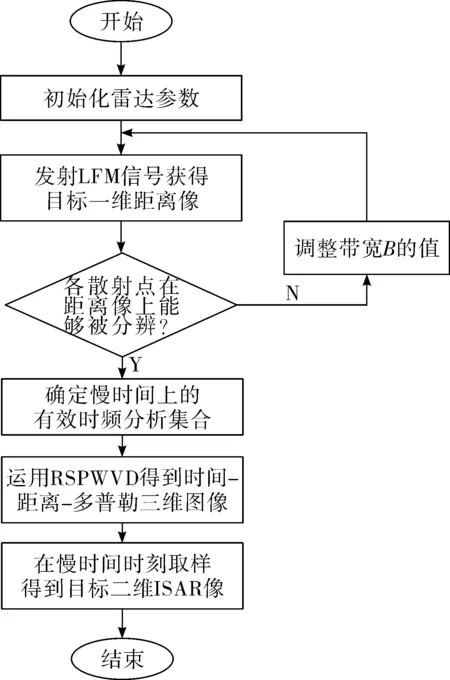
文中针对机动目标的成像问题,提出了一种基于RID算法的认知成像方法。通过对目标进行特征认知获得反馈信息,自适应的调整雷达发射带宽,并实现了在RID算法中利用时频分析进行目标像方位向分辨时的优化重构。仿真实验验证了文中方法的有效性。
1 面向机动目标ISAR成像的RID算法

(1)
将目标抽象为散射点模型,则在慢时间tm时刻的回波信号为:
(2)
式中:K为散射点数量;σk为第k个散射点的反射系数;Rk(tm)为第k个散射点到雷达的距离;c为光速。
将成像场景中心位置作为参考点,取参考信号为
(3)
式中R0(tm)为参考点到雷达的距离。
(4)
式中:RΔk=Rk(tm)-R0(tm),可近似为散射点k相对于参考点的径向距离,相位项Φk(tm)则包含了散射点的方位向信息,需要另外处理。由此可知,对式(4)取模即可得到目标的一维距离像。
根据ISAR成像体制中的转台成像模型[6],当目标做平稳运动时,各散射点的慢时间多普勒频率与其相对于参考点的横向距离xΔk成正比,有
(5)
因此在传统的距离-多普勒(RD)算法中,仅需对式(4)做关于慢时间tm的傅里叶变换,有
(6)
式(6)即为重构出的目标二维ISAR像。
而对于机动目标,散射点的慢时间多普勒频率是时变的,若直接进行傅里叶变换则会使目标像横向散焦,因此RD算法失效。
时频分析方法可以得到信号频率随时间的变化情况,因此将时频分析引入到RD算法中,替代对慢时间的傅里叶变换,由此得到目标的瞬时多普勒谱,实现机动目标二维成像,这就是距离-瞬时多普勒(RID)算法的原理。
时频分析的方法有很多种,对于LFM信号,具有理想时频集聚性的是Wigner-Ville分布(WVD),已知信号s(t),其WVD的定义式为:
(7)
对于载频为fc,调频率为γ的LFM信号,其WVD为:
(8)
然而WVD属于双线性时频分布,对于ISAR回波这种具有多个分量的信号,进行WVD后不仅含有各个分量的WVD,还有分量间的交叉项,影响成像质量。设一含有两个分量的信号是s(t)=x(t)+y(t),其WVD为:
Ws(t,f)=Wx(t,f)+Wy(t,f)+Wxy(t,f)+Wyx(t,f)
(9)
等式右边的前两项为信号分量x(t)、y(t)的自身项,后两项即为二者的交叉项。
为了保证成像质量,需要对时频分析中的交叉项进行抑制,采用重排平滑伪Wigner-Ville分布(RSPWVD)来替代WVD,其基本思想为加入低通滤波器作为核函数来抑制交叉项,并且把时频分布平面的任一点能量值重排到各能量中心,以此减小加入核函数后给频率分辨率带来的影响[7]。
2 机动目标认知成像方法
在ISAR成像的转台模型体制下,目标的距离像分辨率依赖于发射信号的带宽
(10)
其中带宽B的值在LFM信号中为:
B=γTp
(11)
考虑到雷达的带宽资源是宝贵的,因此将认知成像中的闭环反馈思想引入到机动目标成像方法中,在对目标进行特征认知后,自适应的调整雷达发射信号参数,从而在保证成像质量的前提下提高雷达工作效率。
2.1 基于特征认知的带宽自适应调整
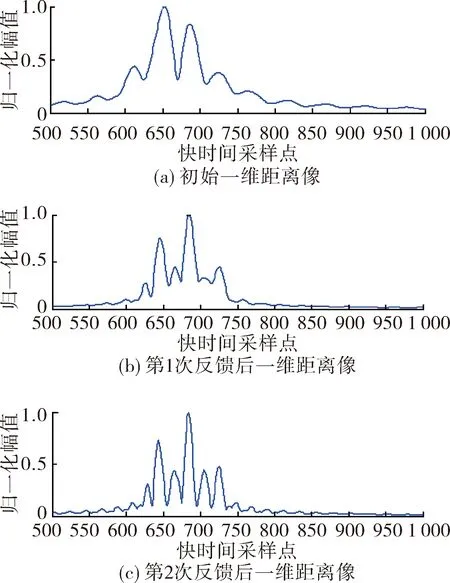
首先设定发射信号的带宽B为一较小的初始值,通过目标反射的少量回波,经过信号处理后得到目标的粗分辨一维距离像sp(f),对其作归一化处理:
(12)

(13)

(14)

(15)
重复以上的带宽调整过程,直到各散射点在一维距离像上均得到分辨,或带宽达到硬件性能最大值时停止。
2.2 方位向认知多普勒谱估计方法
因此当回波信号的快时间采样点数为N时,为了得到完整的方位向瞬时多普勒谱,就需要进行N次时频分析,这样庞大的计算量难以满足雷达成像实时性的要求。为了缓解这一问题,在此提出一种瞬时多普勒谱认知估计方法。
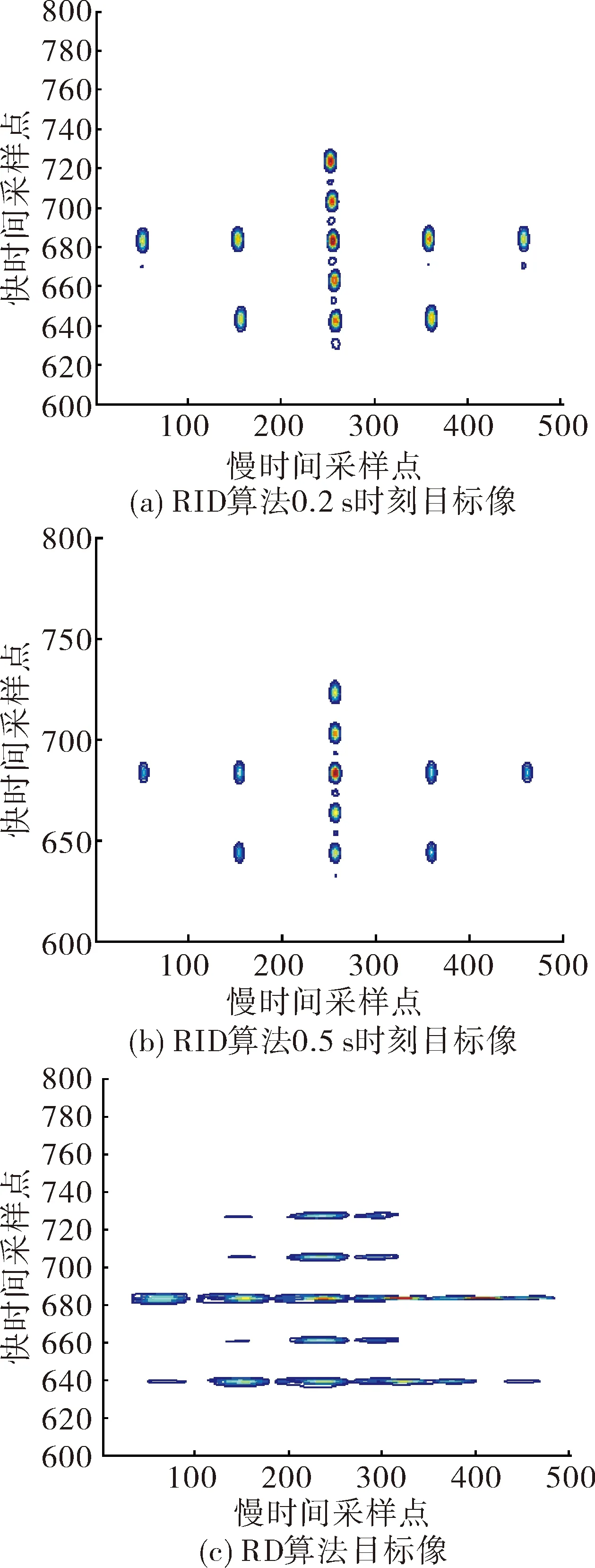
Fe={f|s′p(f)>Ts3,0 (16) 其中N为快时间采样点数,将集合Fe称为有效时频分析集合。 图1 RID算法成像流程图 记集合Fe中的元素个数为NF,接下来对式(4)中的二维函数sc(f,tm),只需对在自变量f∈Fe范围内,做NF次关于自变量tm的RSPWVD,而在f∉Fe范围内,认为其RSPWVD的值是常数0。由此得到了目标的三维时间-距离-多普勒图像,它包含了在所有慢时间tm=1,2,...,M时刻目标的二维ISAR像,M为慢时间的最大值。例如取tm=m1(1≤m1≤M),得到该时刻下的ISAR像为: scm1(f,fd)=WRSP(m1,f,fd) (17) 文中提出的基于RID算法的机动目标认知成像方法,流程图如图2所示。 图2 基于RID算法的机动目标认知成像方法流程图 设成像雷达发射LFM信号,信号的载频fc=10 GHz,脉冲宽度Tp=10-6s,初始带宽B=10 MHz,脉冲重复频率PRF=500,接收信号信噪比SNR=10 dB。 假设在与雷达斜距R0=2×104m处存在机动飞行目标,沿切向初始速度v=500 m/s,加速度a=5 m/s2,该目标散射点模型如图3所示。 图3 目标散射点模型图 在确定能够提供足够距离像分辨率的带宽后,运用2.2节提出的方位向认知多普勒谱估计方法,得到了有效时频分析集合Fe=[626,743],其长度Lfe=104。因此接下来只需进行104次时频分析,相对于传统RID算法,减少了计算量(1-Lfe/Nt)×100%=94.8%,这体现了方位向多普勒谱的认知方法,能够有效减少方位向多普勒谱重构的计算量,进而提高机动目标成像实时性。 在有效时频分析集合内,对已经过第3章中步骤2中所述处理后的信号,运用时频分布RSPWVD得到方位向瞬时多普勒谱,取慢时间时刻tm=0.2 s、tm=0.5 s,如图5所示,获得了在这2个时刻目标的ISAR像(见图5(a)、图5(b)),并与RD算法中直接进行方位向FFT获得的目标像(见图5(c))进行对比。 图4 目标一维距离像图 由图5可以看出,相比于直接进行方位向FFT的传统RD算法,采用方位向时频分析的RID算法对机动目标的成像质量明显更好,各个散射点在方位向上均能够被分辨。 定义图像熵H作为算法的成像质量指标,其表达式为: (18) 式中:|scm(n,m)|为图像中像素点的幅度。图像熵H的值一般小于0,越大代表该图像质量越好,各散射点越能清晰分辨。由此计算得到图5中3幅图像的图像熵计算结果如表1所示。表1中的结果定量证明,采用RID算法的成像质量明显要好于RD算法。 表1 图像熵计算结果 针对非平稳运动的机动目标,提出了一种基于RID算法的认知成像方法。依据认知成像中的闭环反馈思想,在目标距离像分辨上提出了特征认知后信号带宽的自适应调整方法;在目标方位向分辨上提出了方位向多普勒谱的认知估计方法。仿真结果表明:文中方法能够节省信号带宽资源、减少成像重构计算量,根据设定的成像质量性能指标与传统方法进行对比,证明了文中方法实现机动目标成像的有效性。 图5 目标二维像对比图
3 算法流程
4 仿真分析



5 结论