卫星导航差分系统和增强系统(十三)
2019-05-27刘天雄
+ 刘天雄
3.4.2.2 工作原理
EGNOS系统体系结构复杂且高度冗余,EGNOS系统的设计目标是满足SBAS的标准要求,开展以下四方面的工作,一是接收GPS、GLONASS、及EGNOS-GEO卫星播发的信号和电文数据;二是估计服务区的系统完好性数据和广域差分(Wide Area Differential,WAD)改正数;三是通过GEO卫星广播类似GPS卫星的增强信号,电文包含轨道和时钟改正数、电离层延迟改正数及系统完好性数据,信号同时具有测距功能;四是验证上述完好性数据和改正数的正确性。
EGNOS系统工作原理和美国WAAS基本一致,EGNOS系统地面测距和完好性监测站RIMS接收GPS、GLONASS导航信号以及EGNOS系统GEO卫星的增强信号,将原始数据送到4个任务控制中心MCC,每个任务控制中心MCC的中心处理设备CPF开展导航信号改正数的实时计算,包括卫星星历、星载原子钟钟差、电离层延迟改正数以及系统完好性信息,然后地面导航增强信息注入站NLES将EGNOS增强电文上行注入给GEO卫星,最后由GEO卫星将EGNOS增强信号透明转发给用户,EGNOS系统运行示意图如图41所示。
EGNOS系统用3颗GEO卫星覆盖整个欧洲服务区,作为透明转发器播发地面导航增强信息注入站NLES上注的增强信号。在一颗GEO卫星链路出现失效时,EGNOS系统空间段还有两颗GEO卫星能够正常工作,这种配置可以在整个服务区内具有较高程度的冗余度。EGNOS系统的运行控制理念是确保在服务区内任何位置都有两颗GEO卫星正常播发系统的增强信号。理论上,用户只要接收到一颗GEO卫星播发的系统增强信号,就能获得EGNOS位置解(需要同时接收GPS或者GLONASS导航信号),在剩下的两颗卫星中有一颗意外服务中断情况下,系统通过切换链路就可以确保系统的可靠性。
作为GPS系统在欧洲的星基增强系统SBAS,EGNOS系统GEO卫星在GPS系统的L1频点(1575.42 MHz)播发增强信号,信号也是采用右旋圆极化(right-hand circular polarization,RHCP)方案。EGNOS系统播发每秒含有250bits信息的增强电文,原始导航增强电文采用与前向误差修正码(Forward Error Correcting,FEC)的1/2卷积编码方案,增强电文数据流的信息速率是500symbol/second。增强电文再与1023-bit伪随机测距码模二和处理生成扩频信号,然后利用二相移位键控技术(biphase shift-keyed,BPSK)将扩频信号调制到L1载波信号上,信号码速率1.023Megachips/second。EGNOS增强信号结构符合ICAO SARPs制定的SBAS星基增强标准,详见http://www.navipedia.net/index.php/EGNOS_Messages。
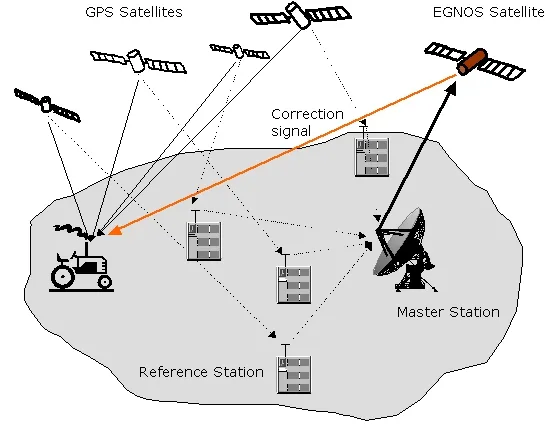
图41 EGNOS系统运行示意图
对于地面5°以上仰角的用户,EGNOS系统增强信号的落地电平-161dBW~-153 dBW,在EGNOS系统开放式服务OS和生命安全服务SOL的接口控制文件中详细定义了EGNOS系统增强信号结构,详见MOPS DO 229相关规定,包括载波频率、调制方式、电文结构、电文协议和内容,增强信号的主要特征如下:
·载噪比(Carrier Phase Noise): 10Hz单边噪声带宽时,单载波信号的相位噪声谱密度要使接收机锁相环路能够跟踪到载波信号的精度是0.1弧度(rms);
·信号频谱(Signal Spectrum): 利用GPS系统的L1频点播发EGNOS系统增强信号,中心频点1575.42MHz,信号带宽2.2MHz,在中心频点+/- 12MHz带宽内,信号功率不小于95%;
·多普勒频移(Doppler Shift): 在最坏情况下,稳态用户的多普勒频移小于40m/s, 在L1频点的多普勒频移近似为210Hz ;
·载波频率稳定性(Carrier Frequency Stability): 排除电离层延迟和多普勒频移后,在用户接收机天线的输入端处的载波频率短期稳定性(Allan方差的平方根值)优于5x10-11/1s~10s;
·极化方式(Polarization): 右旋圆极化,轴比小于2 dB;
·相关损失(Correlation Loss): 由于信号调制过程中的不理想或者转发器滤波损失引起的相关损失小于1 dB;
EGNOS系统Inmarsat-III通信卫星 (AOR-E和IOR-W)和ESA Artemis通信卫星星载导航增强转发器载荷的关键参数如表17所示,
地面段计算GPS和GLONASS卫星精密的轨道、时钟、电离层延迟差分改正数以及完好性误差边界,空间段3颗GEO卫星作为冗余的增强信号播发通道,将地面段计算的增强信息透明转发给地面段用户。用户利用EGNOS接收机计算当前的位置并获取完好性信息。地面段同时还要完成系统性能分析、运行维护等任务。EGNOS系统依靠高精度的GPS接收机提供的系统1 PPS(one Pulse Per Second)同步秒脉冲实现内部各个环节的时间同步任务,即EGNOS系统时间与GPST保持时间同步。
地面段对GPS、GLONASS、及EGNOSGEO信号的监控(Monitoring and Control,M&C)工作由任务主控中心MCC的中心处理设备CPF实施,MCC由工作人员值守,并不是一个自动化系统,如果主控中心MCC工作异常,那么另一个热备的主控中心MCC将立刻接管EGNOS系统信号监控的任务,另外2个主控中心MCC处于冷备状态,当主份和热备主控中心MCC都出现问题后,2个冷备状态的主控中心MCC则立即被激活。EGNOS系统是一个广域分布的、冗余的系统,各个子系统之间的数据流也具有不同程度的备份措施。
EGNOS系统数据流分为信号处理环路(Processing cycle)和信号检测环路(Check cycle),如图42所示,信号处理环路通过地面测距和完好性监测站RIMS的A通道接收GPS/GLONASS/EGNOS-GEO卫星信号,同时给出伪码和载波伪距观测量以及系统完好性信息,并生成增强信号,图中红线表示系统信号处理环路的实时关键数据流;信号检测环路通过地面测距和完好性监测站RIMS的B、C通道接收GPS/GLONASS/EGNOS-GEO卫星信号,将原始数据送到系统任务主控中心MCC的中心控制设备(Central Control Facility,CCF),独立开展伪码和载波伪距观测量以及系统完好性信息的验证和存档工作,图中绿线表示信号检测环路数据流;两个环路数据流闭环处理时间不超过6s,以满足EGNOS系统完好性对告警时间的要求。

表17 星载导航增强转发器载荷的关键参数
EGNOS系统信号处理环路完备地给出了GPS/GLONASS/EGNOS-GEO卫星信号的差分改正数和系统的完好性信息,信号处理环路首先通过地面测距和完好性监测站RIMS的A通道接收GPS/GLONASS/EGNOS-GEO卫星信号,给出伪码和载波伪距观测量和与协调世界时UTCop的偏差。巴黎地面测距和完好性监测站RIMS的监测接收机时钟与协调世界时UTCop保持同步,用于计算任务主控中心MCC中心处理设备CPF的EGNOS系统网络时间(EGNOS Network Time,ENT)与协调世界时UTC的偏差,ENT与UTC的时间偏差信息则通过增强电文MT12播发给用户,用户可以据此溯源UTC时间。
然后这些数据被送到任务主控中心MCC的中心处理设备CPF,生成差分改正数和系统完好性信息,具体处理流程分为四步,一是数据预处理和有效性验证,包括剔除电离层和对流层延迟等系统误差量,监测并剔除载波相位周跳观测量,数据平滑处理以减少随机噪声,滤除残余多径干扰信号分量;二是计算EGNOS增强数据,包括GPS/GLONASS/EGNOS-GEO卫星星历和时钟差分改正数、各网点电离层延迟改正数、用户差分测距误差UDRE和格网电离层垂直误差GIVE残余误差估计及其差分改正数据;三是系统内部增强数据检查和质量估计,包括卫星完好性评估、应用差分改正后用户差分测距误差UDRE和格网电离层垂直误差GIVE残余误差估计的一致性、中心处理设备CPF以服务质量标识形式反映结果的一致性,根据服务质量标识,地面导航增强信息注入站NLES可以选择主用中心处理设备CPF的数据;四是根据ICAO SBAS标准生成格式化的增强电文,并确定增强电文的最优播发顺序。EGNOS系统信号处理环路实时关键数据流如图43所示,
任务主控中心MCC的中心处理设备CPF的核心是一套复杂的系统完好性算法及其软件,决定了EGNOS系统的性能,其中对于用户差分测距误差UDRE和格网电离层垂直误差GIVE的计算是至关重要的,它们的误差边界确定了系统完好性,算法同时会影响系统的连续性和可用性指标评估结果。CPF将生成并核对后的EGNOS电文通过系统广域通信网络EWAN送到地面导航增强信息注入站NLES,将EGNOS电文上行注入给系统的GEO卫星,由卫星播发给用户。

图42 EGNOS系统数据流
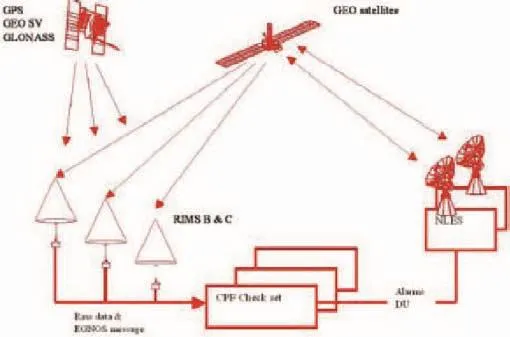
图43 EGNOS系统信号处理环路的实时关键数据流
EGNOS系统信号检测环路完备地通过地面测距和完好性监测站RIMS的B、C通道接收GPS/GLONASS/EGNOS-GEO卫星信号,在任务主控中心MCC的中心处理设备CPF生成EGNOS电文之前以及GEO卫星将其播发给用户之后,任务主控中心MCC的中心控制设备CCF独立开展系统完好性的验证工作,CCF同时开展数据统计试验,以验证差分改正数及其相应残余误差的可靠性。
对于用户等效测距误差(User Equivalent Range Error,UERE)和用户差分测距误差(User Differential Range Error,UDRE)来说,由多个地面测距和完好性监测站RIMS同时观测一颗卫星,然后开展伪距观测误差数据的统计分析工作,获得用户等效测距误差UERE及其残余误差——用户差分测距误差UDRE。中心处理设备CPF计算的差分改正数及其残余误差与中心控制设备CCF独立计算的相应数据进行比对,当两者计算结果偏离较大时,系统给出完好性告警标识“not monitored”。对于格网电离层垂直误差(Grid Ionospheric Vertical Delay,GIVD)和格网电离层垂直误差(Grid Ionospheric Vertical Error,GIVE),中心处理设备CPF计算的差分改正数及其残余误差同样也要和中心控制设备CCF独立计算的相应数据进行比对,当两者计算结果偏离较大时,系统也给出完好性告警标识“not monitored”。
对于卫星信号和电离层格网点延迟对应的用户差分测距误差UDRE和格网电离层垂直误差GIVE两部分数据,EGNOS系统完好性有“可用”和“不可用”两种级别的标示,UDRE和GIVE表征系统采用WAD广域差分修正后,卫星信号和电离层格网点延迟残余误差的统计估计值。在用户位置计算结果完好性评估中,UDRE和GIVE用于计算误差边界。快变和慢变WAD广域差分修正关系建立了不同误差源的时间差分改正模型,快变WAD广域差分修正模型表征了卫星星历和星载时钟误差等快速误差变化量的改正关系,慢变WAD广域差分修正模型表征了卫星星历和星载时钟漂移等长期误差变化量的改正关系,电离层延迟改正量在预先定义的各网点上给出改正数据。
EGNOS系统接收机研制商采用标准、开放的数据格式,主要包括NMEA, RTCM, NTRIP,SiSNET和RINEX。EGNOS系统增强信号的载波频率与GPS系统L1频点(1575.42MHz)一致,采用GPS系统的测距码,但是增强电文的数据格式不同,目前定义了16个不同的电文类型以广播系统完好性数据和广域差分改正数,电文每6s更新一次。对于生命安全(Safetyof-Life,SoL)服务,EGNOS系统接收机需要满足当前民用航空星基增强SBAS等已经认证的标准,例如,机载设备需要完全满足RTCA SBAS MOPS DO-229标准,接收机天线设计需要完全满足RTCA SBAS MOPS 228和301标准,星基增强SBAS设备需要完全满足RTCA TSO(C190, C145b, C146b)标准,此外,还应满足飞行管理系统(Flight Management Systems,FMS)等其他航空综合电子设备要求。目前研发卫星导航星基增强SBAS设备的主要公司有GARMIN、Honeywell、Rockwell Collins及General Avionics。SATNET