具有负反馈机制的改进的蚁群算法在机器人路径规划中的应用
2019-05-25梁娜
梁娜
(铜川职业技术学院 基础部, 铜川 727031)
0 引言
近些年,随着机器人研究的发展,机器人路径规划也获得一定的进步,越来越多的学者提倡通过多种路径规划算法,例如:遗传算法[1]、粒子群优化法[2]等。但不得不说, 路径规划主要目的始终不变,就是找出一条自起点至目标点之间的最优路径,包含用时及其路径最短,避开一系列的障碍物到达至顶点。蚁群算法作为一种群智能算法,主要用于解决机器人路径规划、集成电路布线等方面的问题。Dorigo等[3]最早提出利用蚁群算法解决旅行商问题。Marzband等[4]提出一种以多层蚁群优化为基础的能量管理系统算法,在实时调度过程中对微源的最佳运行加以明确,以达到节省电力生产成本的目的。孟建东[5]在简要分析计算机网络路由优化方面问题基础上,提出利用蚁群算法解决计算机网络信息传输环境出现的延时抖动、路径消耗大等问题,研究结果表明,所用改进的蚁群算法,有利于避免发生局部最优值的问题。由于蚁群算法存在在一定概率下陷入局部最优解的不足之处,这种情况难以指导机器人寻找最优的路径,只是获取次优解。为有效解决这一问题,本研究引入负反馈机制的改进蚁群算法,用于完成机器人路径规划,仿真结果证实,所使用的改进蚁群算法在复杂问题下获取最短距离,平均距离及最优路径成功率均优于传统算法性能。
1 建立环境模型
本研究使用W.E.Howden提出的栅格法[6]建立环境模型,栅格法是指对模拟的机器人所处环境进行划分,组成大小相同的栅格,采用栅格代表可行驶或者障碍区域。如今,这种方式已经被广泛用于多数机器人系统中,详细描述为:栅格法就是把机器人所工作空间划分为二进制信息网格单元,处在静态环境下,假定障碍物大小、位置为已知条件,且机器人所处二维空间模型用D表示,通过网格对D空间实施均匀的分割[7]。对于网络与不可行驶区域之间的交点,可以划分为可行、不可行网格,前者用白色格子代表,后者以褐色格子表示,绿色、红色分别代表这起点、终点,具体见图1所示。
通过上述分析,利用序号法,遵循自左至右、从上至下这一顺序完成栅格编号操作。每一个栅格均设定所对应的序号及坐标,即:第i行、j列栅格记作:D(i,j),与之对应的序号是k。而k和(xi,yj)坐标间的关系如式(1)、式(2)所示。
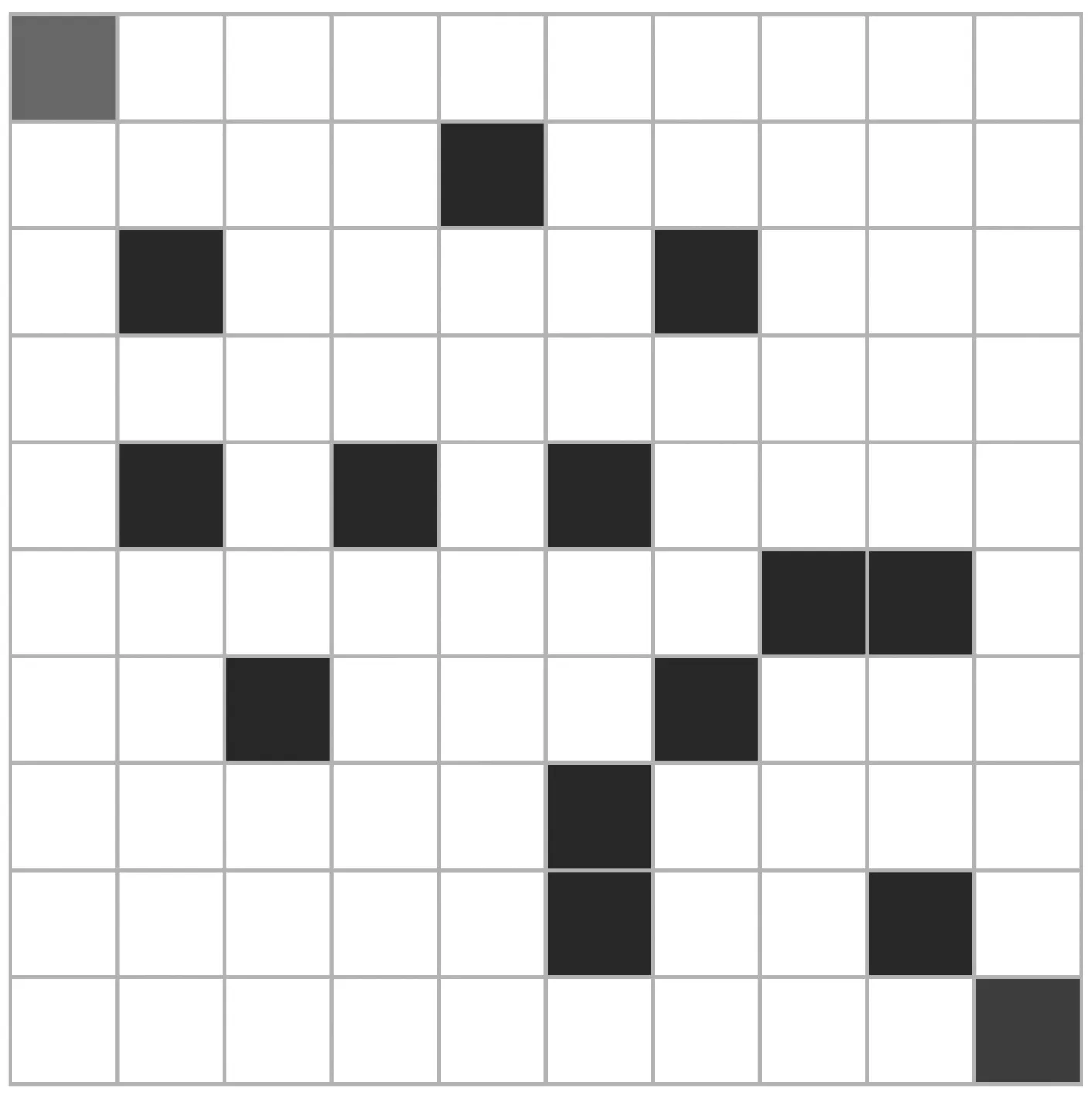
图1 环境建模效果图
(1)
yj=int[(k-1)/Nh]+1
(2)
上述式子中,Nh代表每一行栅格数,mod表示求余计算。必须注意,机器人实际运动中,因其每走一部均是从一个栅格中心进入相邻栅格中心,因此,默认其运动方向设置为8个。
2 蚁群算法及其改进
2.1 概述蚁群算法

(3)
信息素更新主要由会挥发、释放这两个过程组成,在全部蚂蚁完成一次搜索后,利用当前最优路径指导其他蚂蚁搜索路径如式(4)。
(4)

(5)
蚁群算法的程序结构流程示意图,如图2所示。
2.2 算法的不足与改进思想
对于蚁群而言,负反馈即信息素τ的堆积。由公式(15)可知,蚂蚁在随机走完一次循环之后,对于所发现的较短路径,会有较多信息素的遗留。之后通过公式(3),信息素越多,就会有更高的概率吸引蚂蚁在下一次循环之中选择此路径。如此不停循环,最终,全部的蚂蚁均会选择此路径,蚂蚁群体的范围便会逐渐收敛。但是,蚁群算法在处理大规模问
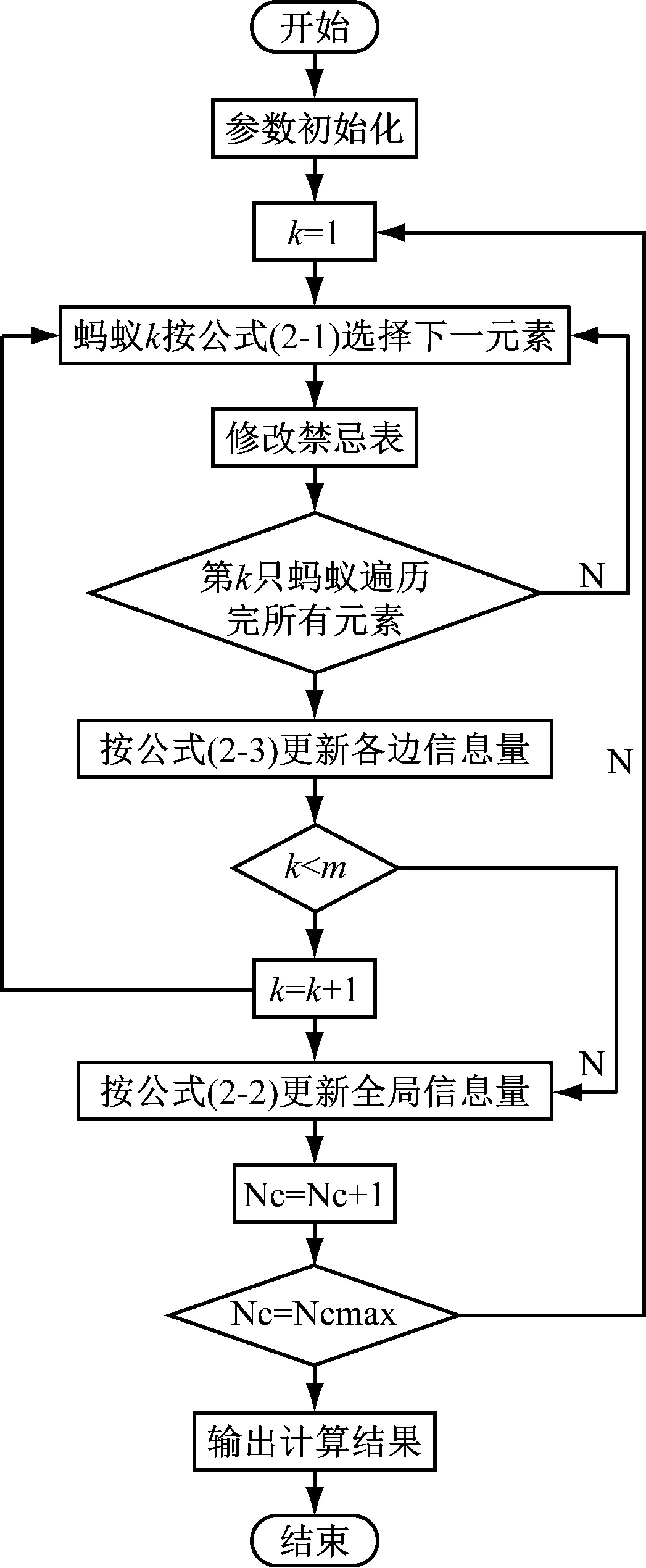
图2 算法流程图
题之时所取得的效果并不理想,究其原因,根本在于负反馈程度是不变的。由此,基于排序蚂蚁算法(ASrank)改进之处在于,不单只是最优路径上的蚂蚁释放信息素,先要对蚂蚁照出的所有路径给予排序处理,随之,挑选路径排序处于前列的蚂蚁释放相应地信息素[9]。蚂蚁依据路径长短完成排序,所释放信息素量根据排序等级做好加权处理。求解为式(6)。

(6)
式(6)中,ω代表每一次迭代处理后路径排序靠前释放相应信息素的蚂蚁总数;Cb代表最优的路径距离;Δτb(i,j)代表当前最优蚂蚁所释放信息素情况;Δτk(i,j)是前(ω-1)只蚂蚁信息素释放状况;Ck为排名处于前列的蚂蚁寻找距离,为式(7)、式(8)。
(7)
(8)
MMAS算法改进点在于,基于AS算法搜索方法与防止早熟收敛机制相结合,促使算法获取最优性能[10],这种算法能对路径上的信息素总量给予有效的控制,使其保持在一定范围之内,防止蚂蚁过快收敛得到局部最优路径,确保蚂蚁可以搜索更为广泛的领域[11]。信息素遵循下列规则更新为式(9)。
(9)

(10)
2.3 具有负反馈机制的改进的蚁群算法
在蚁群算法用在处理复杂环境下,蚂蚁会倾向于挑选简单路径,导致算法极易进入局部最优解局面,从而错过最优的路径。针对上述情况,文中提出具备负反馈机制改进的蚁群算法(AS-N)有效解决这一问题,并由路径构建及信息素更新两个方面实施优化改进。在增加负反馈机制的蚁群算法内,某一信息素可利用正(τij)、负(φij)反馈信息素矩阵代表。首先,对正、负反馈信息矩阵进行初始化处理,寻优环节通过历次迭代最优方法实时更新信息素。路径实施搜索环节,不仅要存储最佳路径,也必须将最差路径保存下来[12]。信息素更新过程中,不单要在最优路径方面释放正反馈信息素,且在最差路径方面将负反馈信息素释放出来。在建立路径时,通过式(11)为下一步移动进行指导。
(11)
式(11)中,δ表示较差路径上设定的负反馈信息素上界,a、y代表正、负面反馈信息矩阵,β表示启发式信息权重值。与原来的算法比较,在新公式内引入惩罚项δ-φij(t)。由于迭代次数不断增加,在并未探索的路径上δ-φij(t)明显比恶化路径上的数值大。基于此,运用这个新公式挑选路径,并把蚂蚁引导至未知路径内。此时,资源总量处于一定的状态,因此,必须充分运用有限资源,促使蚂蚁更少并探索新的恶化路径,有更多蚂蚁取搜索未知路径,防止陷入局部最优的解中。其中,使用最短、长路径及时更新正、反馈信息素,为式(12)~式(15)。
(12)
(13)
(14)
(15)
3 实验分析
3.1 设置合理的参数
本次实验中,选取AS、MMAS、ASrank及AS-N算法进行对比分析,并设定在复杂及简单环境下具体结果。经过改进处理的蚁群算法主要包含a、β、ρ、γ、δ以及蚂蚁数量等参数,其中,信息素a在限定的范围之内[1,5],进行实验中设置为2;蒸发速率ρ处在[0.01,0.03]范围之内,实验取值为0.02;蚂蚁能见度β处在[5,12]范围内,实验数据设定为8;负反馈信息素因子γ、δ限定范围为[1,5]、[5,15]实验使用的数据为γ=2,δ=10。
建模环境设计如下:设置不同复杂度的40*40网格工作区,起点、目标点未知依次为(1,1)、(40,40),每一个小网格长度设定1cm。最大迭代次数是25次,种群大小是100,在不同的复杂障碍条件下仿真结果如图3所示。
3.2 简单问题结果分析
从简单问题视角来说,挑选30组数据对比算法的优越性,并给出不同的算法寻找最优结果平均距离及其运行时间,详细如表1所示。
根据所选4种算法实验结果可知,因所分析问题比较简单,改进一群算法性能提高并不显著。
此外,处在简单环境状态下,选取30组数据平均值,分析其收敛状况,如图4所示。
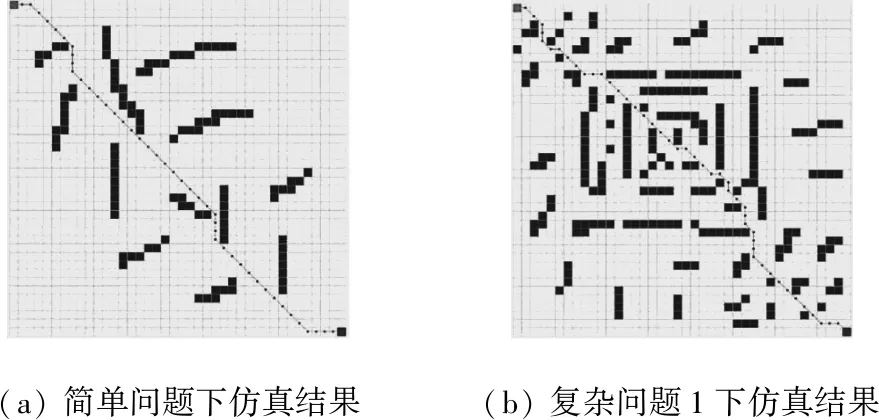
(a) 简单问题下仿真结果(b) 复杂问题1下仿真结果
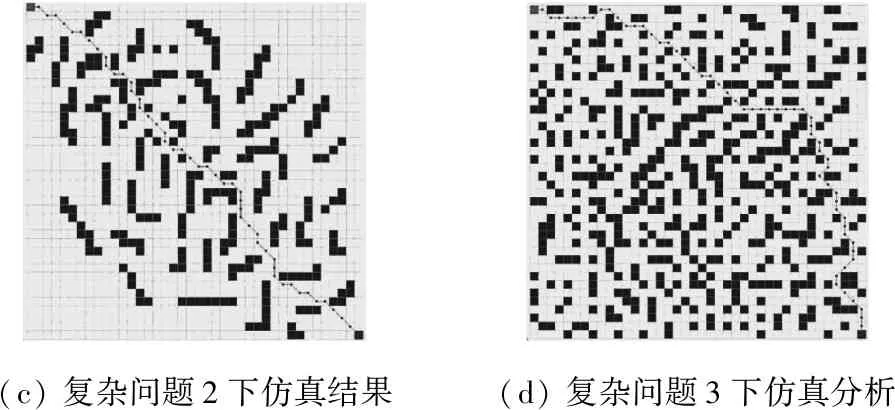
(c) 复杂问题2下仿真结果(d) 复杂问题3下仿真分析

图3 不同复杂障碍条件下仿真结果示意图
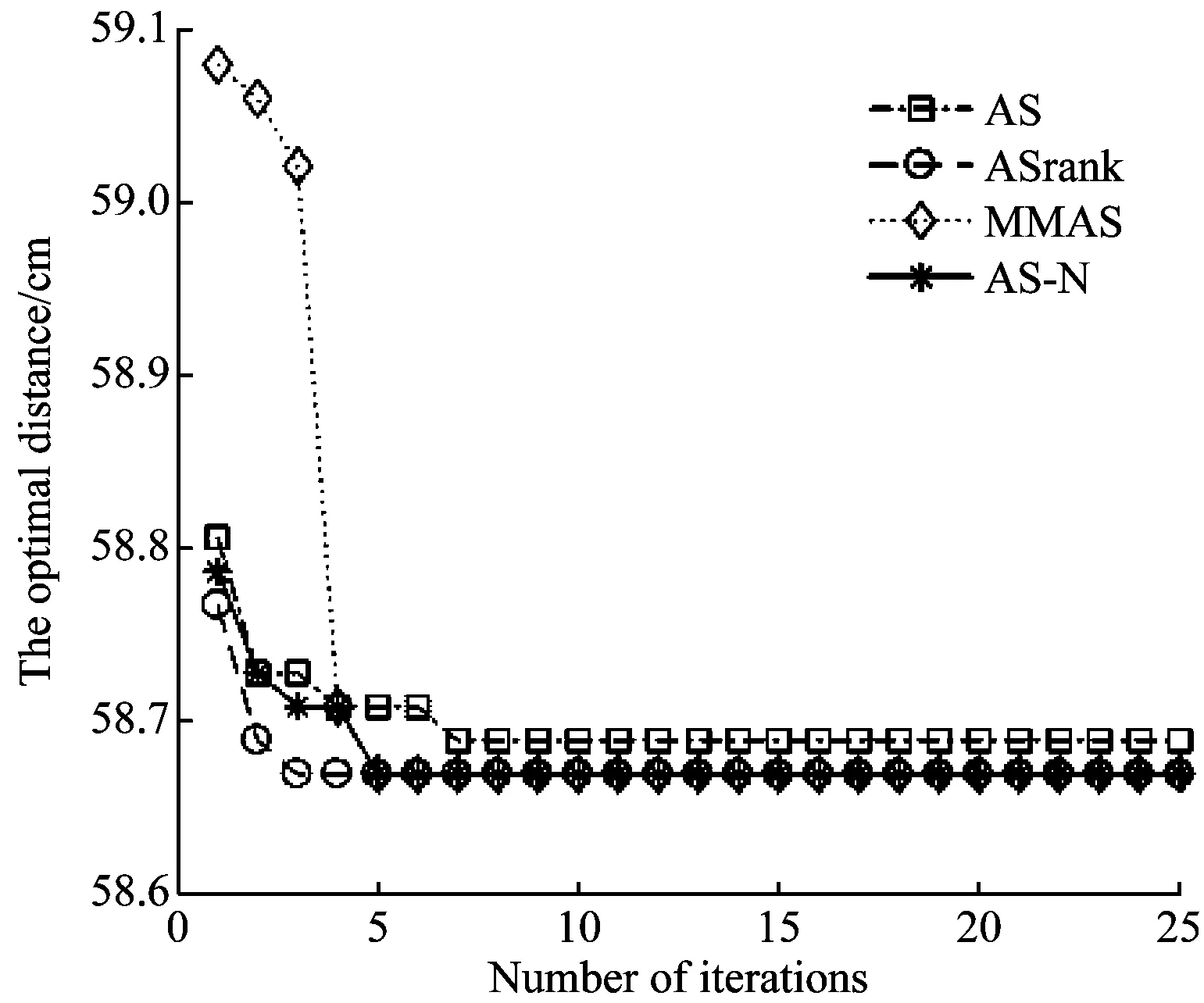
图4 简单条件下不同算法收敛状况对比
分析下图及上表数据可知,这4种算法之间的差距并不显著,这是因为所用改进算法能够轻松解决简单条件下路径规划问题。
3.3 复杂问题分析
对1-3这三个复杂问题来分析,依次挑选30组数据对比所用算法的优越性。不同复杂障碍状态下所用算法寻优平均运行时间及距离,如表2所示。
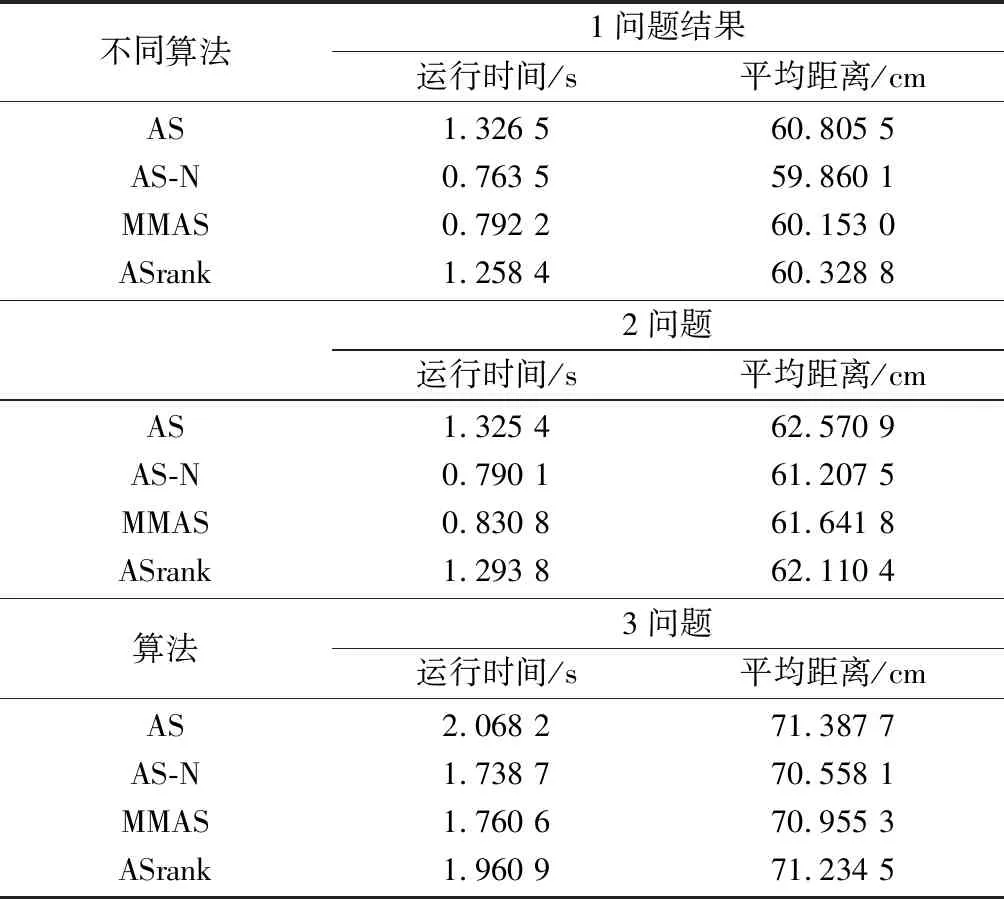
表2 各种复杂问题寻优距离及运行时间结果分析
因问题复杂程度增加,改进AS-N算法优越性更显著,不管是在运行时间或者寻优距离方面,这种算法均能获取良好的效果。
在1-3这三个复杂问题环境下,依次选取30组数据平均值,分析所用4种算法收敛状况,如图5所示。与简单环境相比较,根据该收敛图可知,AS-N算法展现出良好的优越性,说明这种算法能在复杂环境下稳定的寻找最优路径。
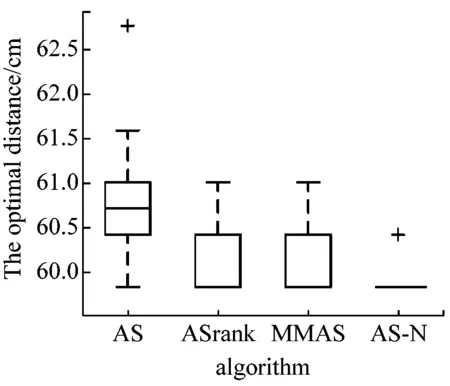
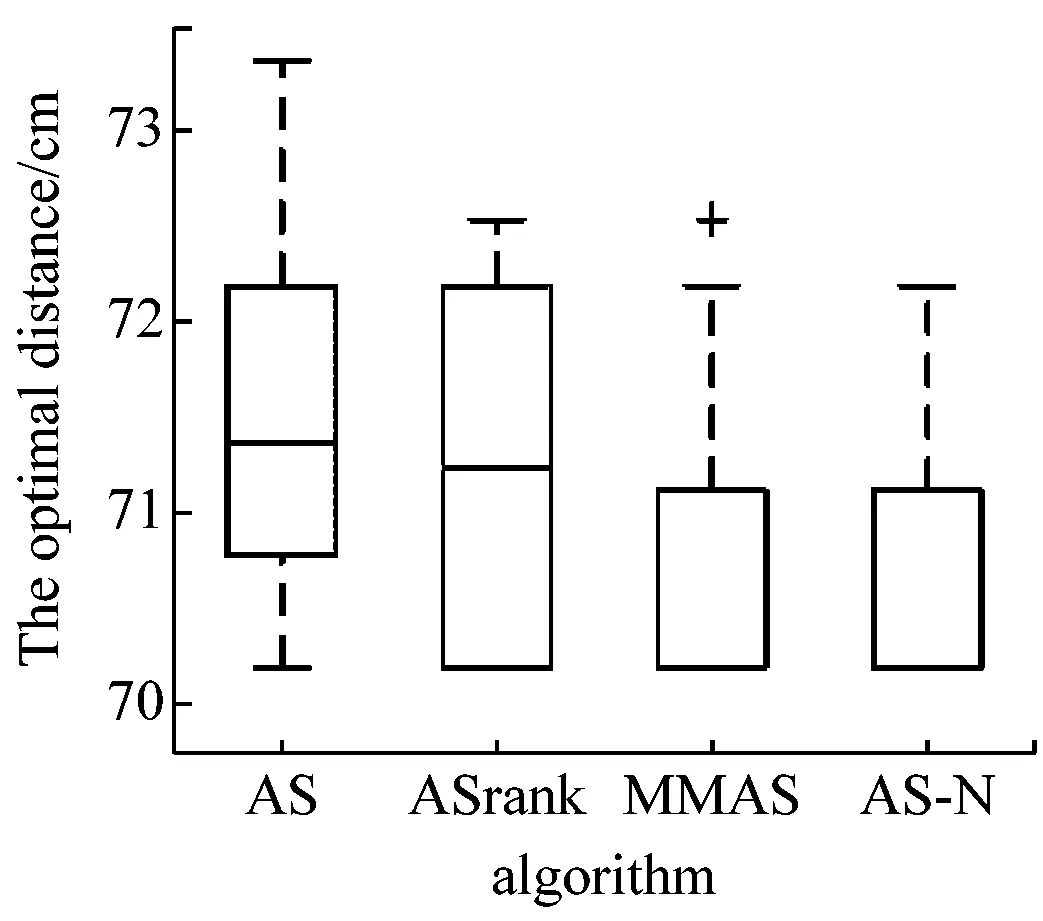
通过对这三种复杂环境下盒图比较可知,如图6所示。
在所选4种算法中,AS-N算法在复杂状态下能获得显著的优势。依次挑选30组数据进行分析,在复杂问题1下,AS-N算法只获得一次脏数据,其他几种算法,处在这种复杂问题条件下,极易陷入局部最优解的几面,其性能远远比不上改进的AS-N算法。在复杂问题2和3环境下,AS-N算法依然能获得理想的效果。
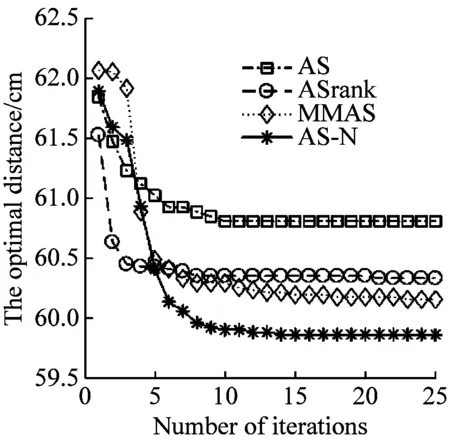
图5 不同复杂环境下4种算法收敛情况
(a) 复杂环境1

(b) 复杂环境2
(c) 复杂环境3
图6 三种复杂环境下3盒图比较效果
4 总结
总之,随着现代科学技术的迅速发展,高科技技术也得到更广泛的使用。路径规划技术是机器人以及人工智能研究较为重要的研究领域,其对于提升机器人功能等方面发挥着重要的作用。如今,蚁群算法已经被广泛用来解决各领域的路径优化问题,尤其在工程设计领域有着更广泛的运用。本次研究针对传统蚁群算法极易陷入局部的最优解问题,提出添加负反馈机制的优化蚁群算法,这种新机制的应用优势在于,当每一代结束后,蚂蚁不单在找出的最优路径上释放相应地信息素,并在最差路径上释放出负反馈信息。研究结果表明,将这种改进的蚁群算法用于机器人路径规划中,有利于指导蚁群优化环节探索未知的领域,以此获取最优的路径。
