可控微环境气雾立体栽培监测监控系统设计与实现
2019-05-24申再贺马春燕窦银科
申再贺,马春燕,陈 燕,窦银科
(太原理工大学 电气与动力工程学院,太原 030024)
0 引言
新鲜蔬菜的供应,一直是困扰我国南、北极科考的一大难题,同时也是偏远边防哨所亟待解决的问题之一。中国南极中山站,一年所需的蔬菜仅靠“雪龙”号从国内和澳大利亚等途经国家补给,仅在夏季供应两次,不仅成本高昂,且储存时间有限。当南极进入漫长的冬季,科考队员只能依靠大白菜等几种有限的蔬菜越冬[1]。因此,研制出适用于南、北极地及偏远边防哨所等特殊环境下的可控微环境气雾立体栽培模式具有重要的现实意义。
气雾立体栽培技术,使作物根系直接暴露在栽培塔充满雾化营养的空气中,可有效解决普通水培供氧、供肥的矛盾,实现立体空间的有效利用,显著提高单位面积作物产量,具有养分供应速度快、养分和水分利用率高等特点,并且可以很好地与自动控制技术相结合,被认为是一种最先进且最具发展前景的无土栽培模式,符合未来智能化农业生产发展的方向[2-3]。目前,常用的气雾立体栽培装置包括:“A”型栽培装置、箱式栽培装置及柱式立体栽培装置等[4]。柱式立体栽培装置可以向上延伸培育,实现植物的垂直栽培,有效节省种植空间,具有广泛的发展应用前景。美国、日本、荷兰等国家已实现了气雾立体栽培模式的推广及应用,并在高级花卉、蔬菜等种植方面取得了突出表现。气雾立体栽培装置不仅可以实现工厂化的生产模式,更加适合于微小环境下的作物栽培,且结合计算机智能控制技术,可以实现恶劣环境下的作物生长,达到高产、高效等目的[5]。
1 气雾立体栽培装置设计
气雾立体栽培装置主要由藤蔓架兼补光灯架、栽培塔、小风扇、母液槽、雾化器、定植孔和自动控制系统等部分组成,如图1所示。
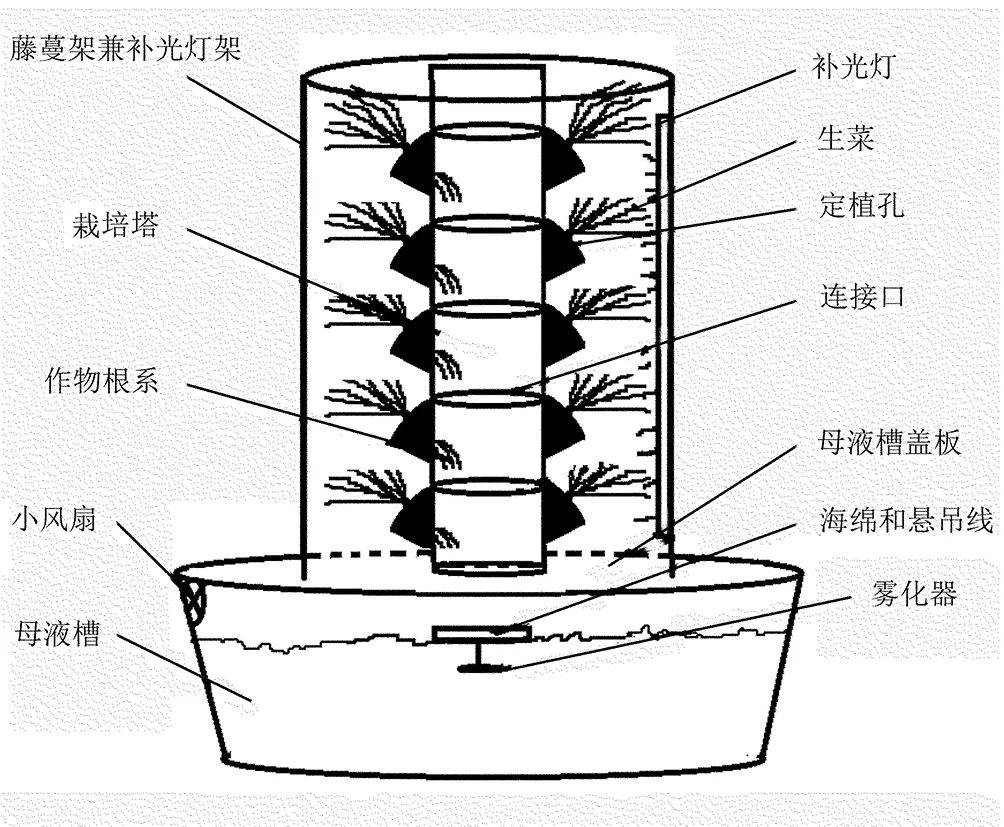
图1 气雾立体栽培装置示意图Fig.1 Schematic diagram of aeroponic Stereoscopic Cultivation device
栽培塔和定植孔:为了整套雾培装置的移动和定植方便,栽培塔采用分体式结构设计,整个栽培塔由5层圆柱形栽培柱组成(可根据不同环境,调整栽培柱的个数),每层栽培柱高19cm,直径22cm,采用空腔结构,便于雾气弥散,上端和下端均设有高度为0.6cm的连接口;栽培柱圆周开设3~4个倾角为45°的定植孔,用于固定植株。
雾化器由3个高频超声波雾化头组成,实现营养液的雾化。由于超声波雾化器需要工作在距离营养液液面5cm左右位置,因此利用海绵悬吊方式控制雾化器位置,在母液槽中实现雾化,借助于母液槽旁侧风扇的适当风力,使雾化后的营养液雾滴弥漫至栽培塔中供作物根系吸收;未被吸收的雾气待凝结回流至母液槽,实现营养液的循环利用。
为弥补光照不足,在栽培塔四周安装了补光灯支架,并均匀固定4个红蓝LED补光灯,不仅实现了补光,还可以满足藤蔓植物爬蔓需要。
2 监测监控系统结构设计
2.1 监测监控对象分析
作物的生长不仅取决于根系吸收的营养是否充分,还取决于生长环境的适宜程度,如果能够将影响作物生长的环境因子人为控制在适合作物生长的范围内,则会缩短作物的生长周期,提高作物的产量和品质[6]。合适的温度对作物的呼吸作用以及水分、养分的吸收有非常大的帮助,而合适的CO2浓度和光照强度更加有利于作物进行光合作用,适宜的湿度环境可以有效降低作物病虫害发病率[7-8]。本文监测监控对象是长3.1m、宽1.9m、顶高2.4m、肩高1.8m的温室微环境,包括温度、湿度、CO2浓度、光照强度等参数的控制,以及气雾立体栽培装置中超声波雾化器的工作频率控制。图2为微环境结构以及部分传感器和设备布置图。
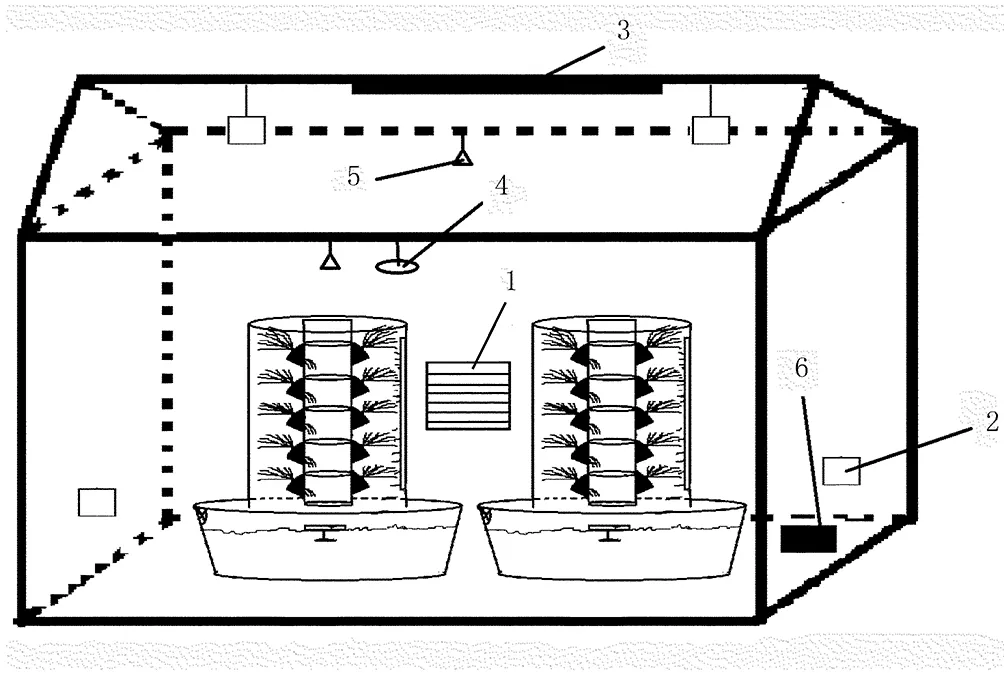
1.通风窗 2.温湿度传感器 3.淋喷加湿器 4.CO2传感器 5.光照传感器 6.加热器图2 可控微环境结构示意图Fig.2 Schematic diagram of controllable micro-environment
2.2 系统结构
系统由上位机和下位机组成,上位机采用PC机,下位机由单片机控制核心、前端数据采集、后端设备控制3个主要部分组成。其中,单片机作为系统的主要控制核心,负责对各个传感器采集来的数据处理分析,发出辅助设备的控制指令,还将与上位机进行数据通信。系统结构如图3所示。前端数据采集部分包括温度传感器、湿度传感器、CO2浓度传感器、光照传感器及pH值传感器;后端辅助设备包括加热器、加湿器、补光灯、CO2电磁阀、通风窗及超声波雾化器等设备。
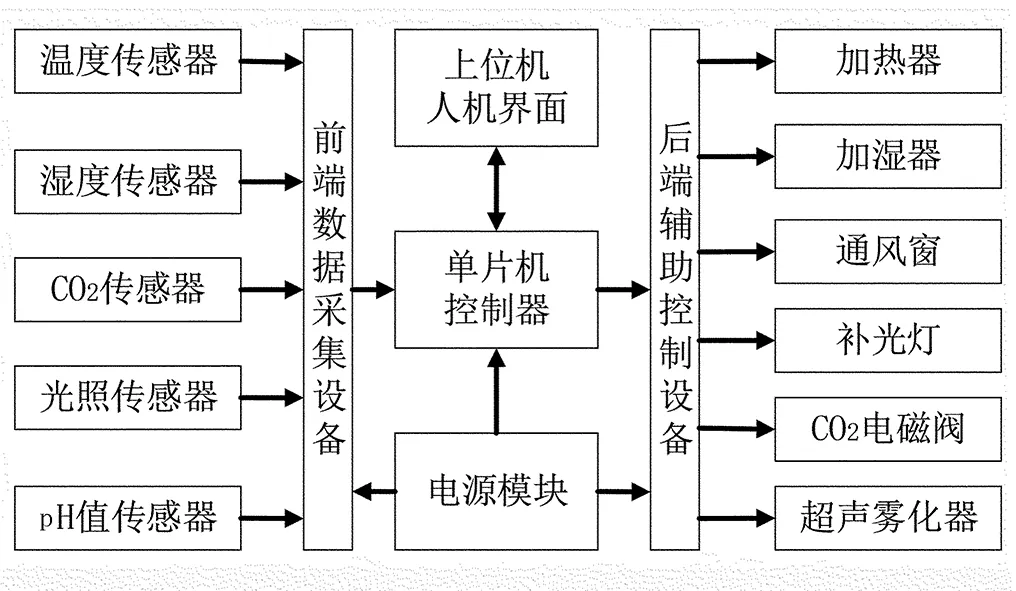
图3 监测监控系统结构图Fig.3 Structure Chart of monitoring and control system
3 系统硬件设计
3.1 单片机主控模块设计
系统选用STC15F60S2单片机作为下位机主控芯片,是一款低功耗、强抗干扰的新型单片机,采用增强型8051内核,速度比传统51单片机快7~12倍,具有42个通用I/O口、两个串口、自带8路10位高速A/D转换接口,具有外围电路设计简单及设计成本低等优点[9]。采用LCD12864液晶显示模块,实时显示传感器采集的环境参数,利用独立按键模块,完成控制参数设定功能,通过串口通信模块实现与上位机数据交互功能。
3.2 前端数据采集模块设计
选用合适的传感器是满足系统设计的关键,首选数字型输出传感器,不仅硬件电路设计简单,且具有较高准确度。各个传感器信息如表1所示。
传感器与STC15单片机的接口电路如图4所示。单片机与DHT11温湿度传感器,采用单总线接线方式,接口电路简单。为了提高温湿度数据的采集准确度,本系统采用多组传感器取均值的方式,实现多处温湿度的数据采集。
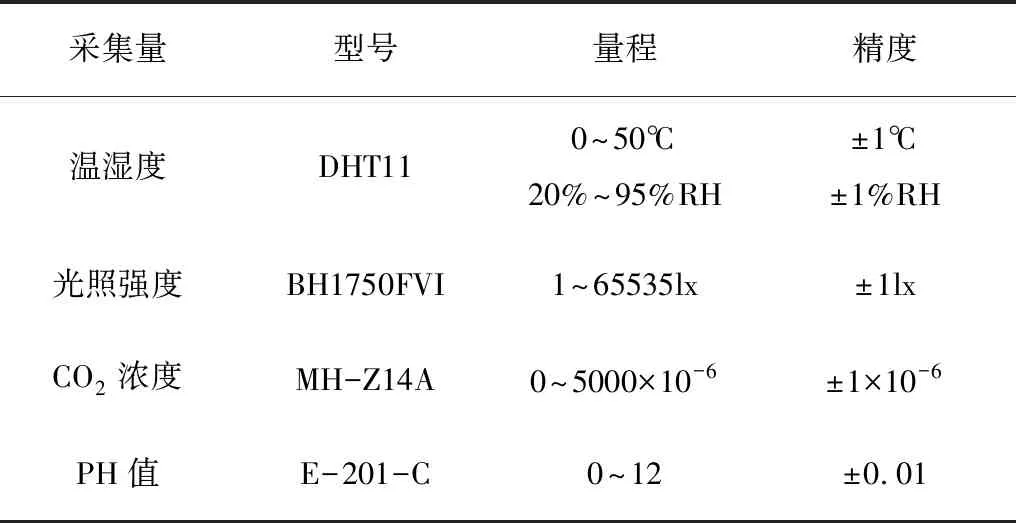
表1 传感器信息Table 1 The information of sensors
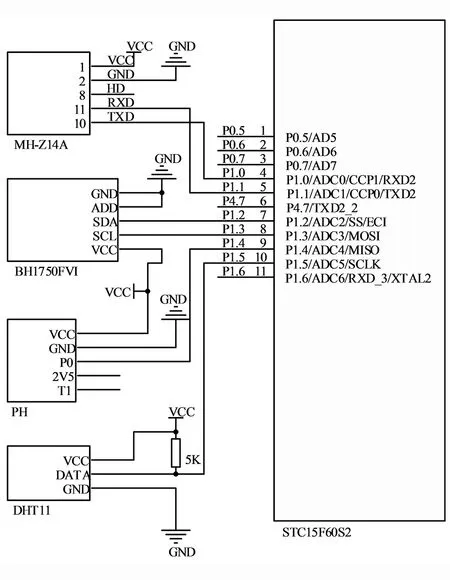
图4 部分传感器与单片机接口图Fig.4 Part of the sensor and microcontroller interface diagram
BH1750FVI数字型光照强度传感器,采用I2C总线进行数据传输,具有接口设计简单,传输速率快等优点。
微环境下的CO2浓度利用MH-Z14A红外传感器采集,选用串口数字输出模式,并采用STC15F60S2第二串口功能,将串口波特率设置为9 600,数据位设置为8位,停止位1位,无奇偶校验位。该模式下量程为0~5 000×10-6满足设计需要。
对于营养液的pH数据采集,采用E-201-C复合电极与pH传感器模块共同实现,电极输出信号为毫伏级,pH传感器模块将信号放大输出0~5V电压值,因为STC15系列单片机内置A/D转换功能,省略外部A/D转换模块,电路设计更加简单。由于pH传感器模块需要通过调节电位器旋钮调节输出电压,所以必须进行标准溶液测量,根据实测值绘制出pH标准曲线,进而完成电压与pH值的换算。
3.3 后端辅助设备控制模块设计
控制部分主要包括对加热器、加湿器、通风设备、CO2补气阀、补光灯及超声波雾化器等设备的控制。加热、加湿、补光及CO2补气使用继电器或电磁阀进行控制,为了使控制系统安全可靠,添加光耦隔离,其一路继电器电路如图5所示。
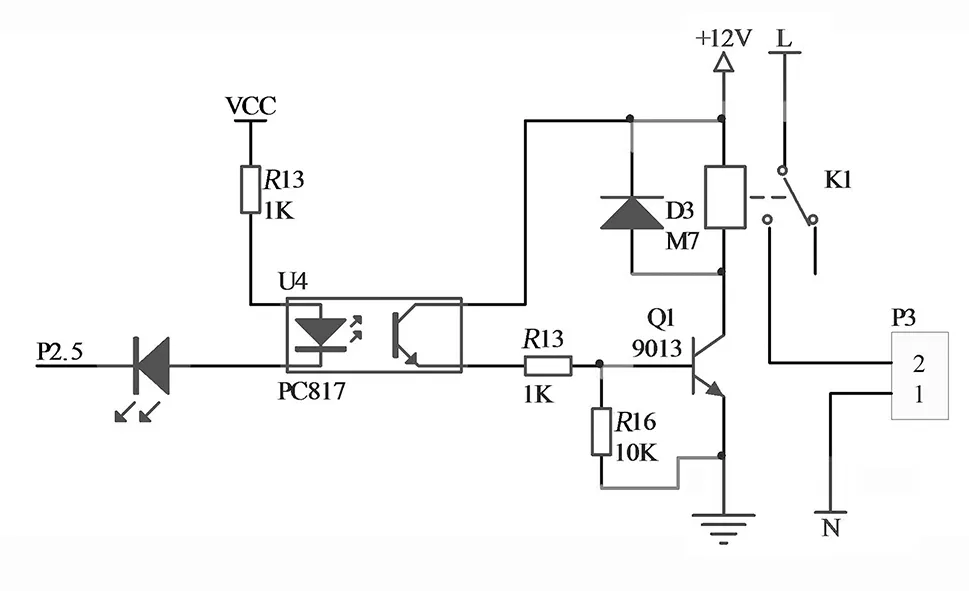
图5 带光耦继电器接口电路示意图Fig.5 With optocoupler relay interface circuit diagram
通风设备的控制包括通风窗的开启及通风风扇的运行,通风窗通过齿轮齿条式开窗机构控制,动力源为电动机[10]。
气雾立体栽培最为重要的环节就是合理控制雾化频率,单片机将栽培塔内部采集的湿度值与上下限设定值进行比较,当湿度值高于上限值,雾化器停止工作;而低于下限值时,雾化器开启,能够有效实现营养和水分的供应。
4 系统软件设计
4.1 下位机运行软件设计
系统软件包括下位机运行程序和上位机监控程序两部分,程序运行的主流程如图6所示。单片机对传感器采集来的数据进行处理,在LCD12864液晶显示屏上显示,并传送给上位机进行处理显示,在上位机人机交互界面上设置环境参数值,当采集到的环境数据超出设定限值之后,便调用相关辅助设备执行控制子程序。数据采集子程序包括温湿度采集子程序、光照参数采集子程序、二氧化碳采集子程序,以及pH值数据采集子程序。
由于微环境系统具有非线性、强耦合、大时滞等特点,很难建立精确的数学模型;而模糊控制算法可以在不确定系统的精确模型情况下,通过模糊推理和专家经验来控制执行器动作,能够有效改善温湿度参数控制的耦合问题。模糊控制方案如图7所示。
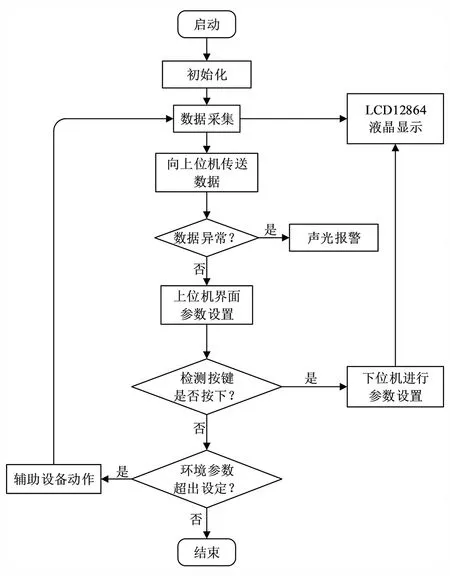
图6 系统运行流程图Fig.6 System operation flow chart
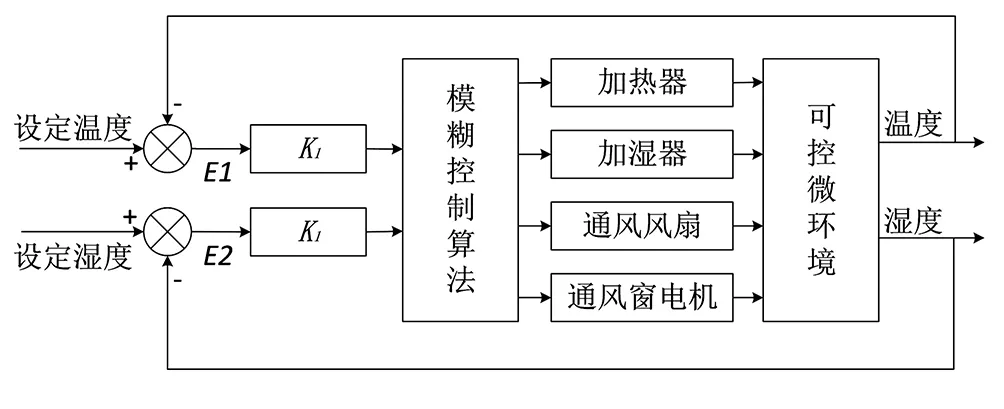
图7 模糊控制方案图Fig.7 Fuzzy control scheme diagram
其中,E1、E2分别为温、湿度设定值与实际测量值的偏差,K1、K2为量化因子,将E1、E2作为模糊控制器的输入量,经过模糊控制器后,得到相关执行机构的控制量。将输入量与输出量的模糊论域定义为[-5,5],采用三角形隶属函数,模糊子集语言均{NB,NS,ZE,PS,PB},模糊子集隶属函数曲线如图8所示。
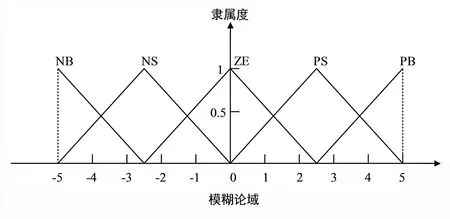
图8 隶属函数曲线Fig.8 Membership function curve
根据环境参数控制特点和环境监控优先级温度大于湿度的原则制定出模糊规则,利用重心法解模糊,控制量输出为相关设备的执行时间。
4.2 上位机监控软件设计
上位机人机交互界面采用LABVIEW编程软件编写。LABVIEW是一种图形化编程语言开发环境,具有设计简单及交互性好等优点[11]。本次系统设计中,上位机与下位机的通讯通过串口通信实现,可以实时显示微环境下的环境参数数据,并将历史数据存储,以便日后查询,作为气雾栽培的数据参考。其具有参数设置功能,可以设置各个环境参数值,达到控制目的,用户界面如图9所示。
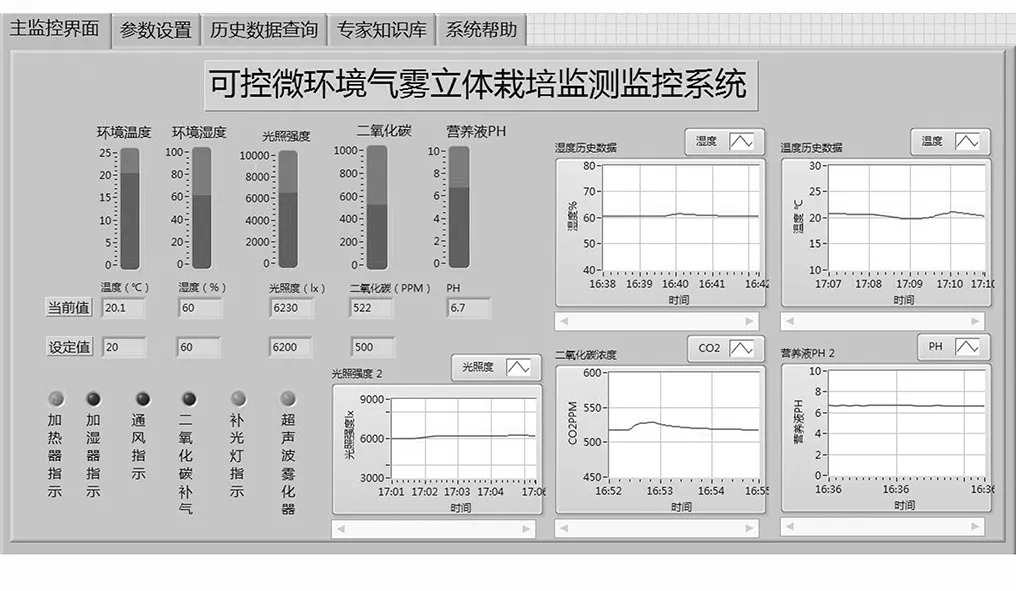
图9 用户界面Fig.9 User Interface
5 系统调试及应用
目前,系统已在实验室进行了调试和运行,利用气雾立体栽培装置进行生菜栽培实验,通过在上位机界面设置目标环境参数值,使得微环境的参数维持在生菜生长最适温度20℃左右,且湿度60%RH左右。经过1个月的栽培观察,生菜生长状态良好,生长速率较快,对某一时段中每隔5min采集的温湿度数据进行观察,2h的温湿度参数采集结果如图10所示。
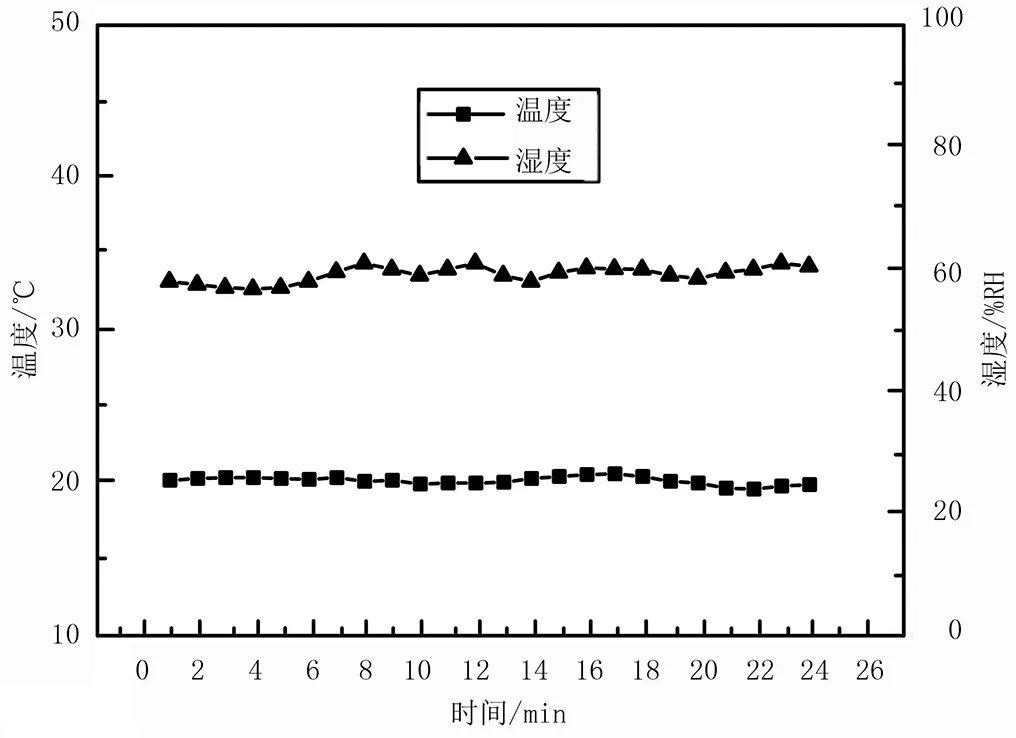
图10 温湿度数据采集结果Fig.10 Temperature and humidity data collection results
结果表明:采用模糊智能控制方法,温度最高20.9℃,最低19.5℃,误差范围±1℃;湿度最高61.7%RH,最低58.0%RH,误差范围±2%RH,误差范围小,满足设计要求;且温湿度参数控制精确,系统运行稳定可靠,充分发挥了气雾立体栽培的优势。
6 结论
1) 可控微环境气雾立体栽培监测监控系统与普通大棚温室控制不同,由于环境空间较小,控制精度有明显提高,且能充分发挥气雾立体栽培模式的优势,充分利用了环境空间,提高了单位面积产量,可以克服南、北极地等恶劣环境的制约,实现多种蔬菜的种植。
2) 通过新型STC15系列单片机及数字式传感器的选用,使得控制系统的外围接口电路设计简单,在降低成本的同时也保证了系统的监测和控制精度。
3) 生菜栽培实验表明:气雾立体栽培模式融合微环境智能调控技术,对于缩短作物的生长周期、提升作物品质有良好的效果,特别适合南北极等恶劣环境下的蔬菜栽培。
