农用拖拉机牵引装置智能化测试与改进
2019-05-24向承翔
向承翔
(重庆三峡职业学院,重庆 404155)
0 引言
作为一种常用的动力机械,农用拖拉机在田间作业和运输作业领域得到广泛而有效的应用,其主要功能是实现牵引和驱动各种农业机械完成工作。图1为农用拖拉机进行牵引作业的过程简图。由图1可知:在发动机提供源动力的基础上,四轮驱动系统通过牵引力的传递带动附加机具跟随运动。随着国内外智能化技术的应用,当前的农用拖拉机多数可匹配95%以上的配套农业机具,专业领域的学者从拖拉机的液压传动、电气控制等方面均做出不同程度的研究与完善,有的学者利用先进的电子控制技术对液压悬挂、耕作场景进行数字仿真,以达到深入掌握农用拖拉机牵引系统的工作机理和核心动态特性的目的。拖拉机牵引装置性能的好坏直接决定配套机具的作业效率,笔者就农用拖拉机的牵引装置智能化改进展开论述。
1 组件构成及特点
常见的农用拖拉机主要工作装置包括动力输出装置、牵引装置、液压悬挂装置及底盘等,主要技术参数如表1所示。工作过程:动力输出装置将发动机功率以旋转机械能的方式传递到农机具上,动力的传输主要依靠输出轴和输出皮带轮;悬挂装置通常采用三点悬挂,包括1根上拉杆、2根下拉杆,在连接牵引装置与待悬挂机具的同时,实现可调节耕深的目的。液压系统主要包括液压提升器(液压缸)、控制阀、液压附件及管路,通过提供连续的电液控制,提供给农用拖拉机充足的配套动力。
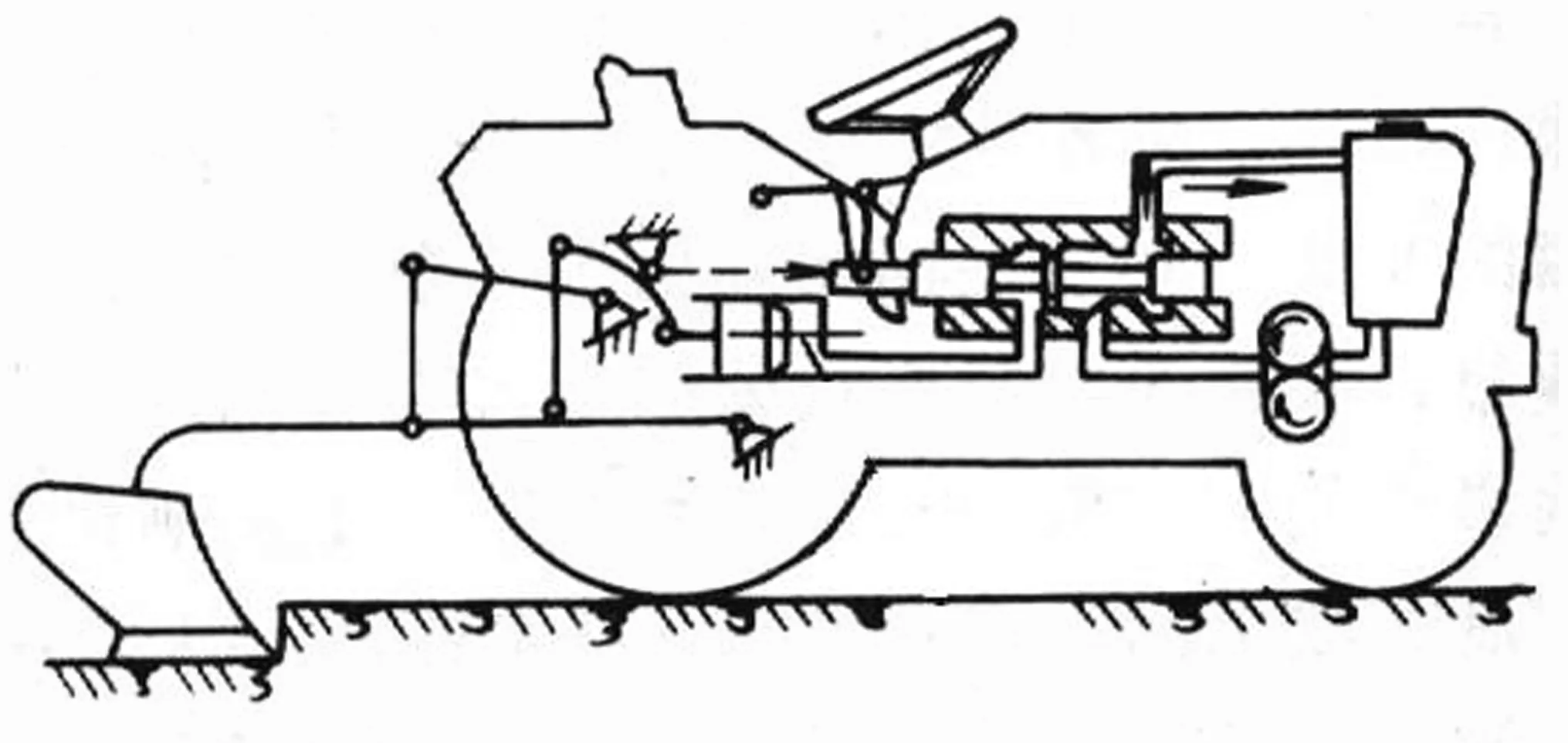
图1 农用拖拉机牵引作业简图Fig.1 Schematic drawing of tractor operation of the agricultural tractor表1 农用拖拉机主要技术参数Table 1 Main technical parameter design of the agricultural tractor
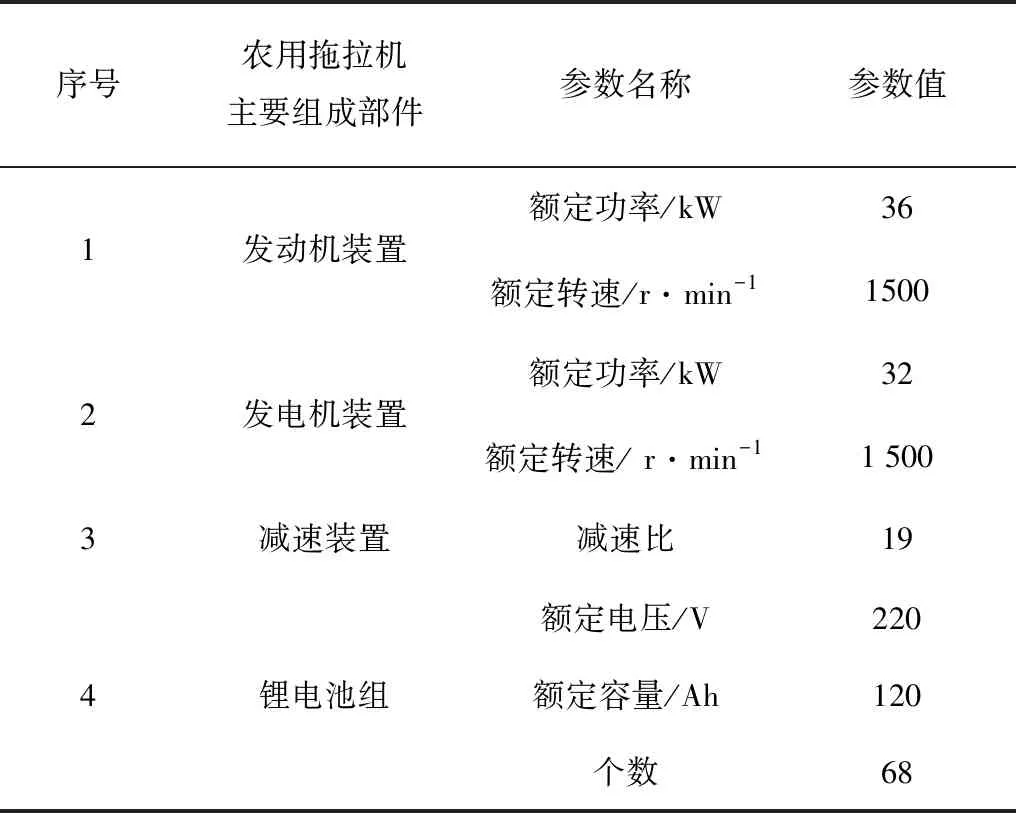
序号农用拖拉机主要组成部件参数名称参数值1发动机装置额定功率/kW36额定转速/r·min-115002发电机装置额定功率/kW32额定转速/ r·min-115003减速装置减速比194锂电池组额定电压/V220额定容量/Ah120个数68
2 牵引装置改进
2.1 数学模型建立
各硬件组成与优化组合会大幅度提升整机工作效率,根据农用拖拉机的行驶速度和驱动轮受到滑转率的因素影响,得出农用拖拉机的牵引力模型为
(1)
φ=φmax[1-exp(-δ/δ0)]
(2)
(3)
式中v—农用拖拉机行进速度(km/h);
rd—农用拖拉机驱动轮半径(m);
ne—农用拖拉机动力装置转速(r/min);
ig—农用拖拉机变速装置传动比;
i0—农用拖拉机减速装置主传动比;
ηδ—农用拖拉机滑转效率;
ηc—农用拖拉机传动装置效率;
φ—农用拖拉机驱动力系数;
φmax—农用拖拉机驱动模型特征值;
δ0—农用拖拉机滑转率;
δ—农用拖拉机滑转模型特征值;
Ft—农用拖拉机牵引力(N);
Te—农用拖拉机动力装置输出转矩(N·m);
CD—空气阻力系数;
A—农用拖拉机迎风面积(m2);
G—农用拖拉机驱动装置所受载荷(N);
f—作业路面摩擦力因数。
从而可知,该农用拖拉机的牵引功率和牵引效率分别为
(4)
(5)
(6)
式中Pt—农用拖拉机牵引装置的牵引功率(kW);
Ft—农用拖拉机牵引力(N);
v—农用拖拉机行进速度(km/h);
Pe—农用拖拉机驱动装置的输出功率(kW);
Te—农用拖拉机动力装置输出转矩(N·m);
ne—农用拖拉机动力装置转速(r/min);
ηt—农用拖拉机牵引效率。
2.2 硬件结构设计
根据农用拖拉机的应用场合和需求可知:农用拖拉机的牵引装置主要分为固定式和摆杆式两大类,固定式牵引装置,主要由牵引支架、牵引叉或牵引板及牵引销总成组成,如图2所示。为适应悬挂和牵引多种类的农业机具,将牵引叉或牵引板设置成灵活拆卸型,同时针对牵引装置核心部位进行改进,其连接部件外形设计如图3所示。具体为在悬挂支架的两侧增加辅助油缸,以确保提升与牵引的柔性度。
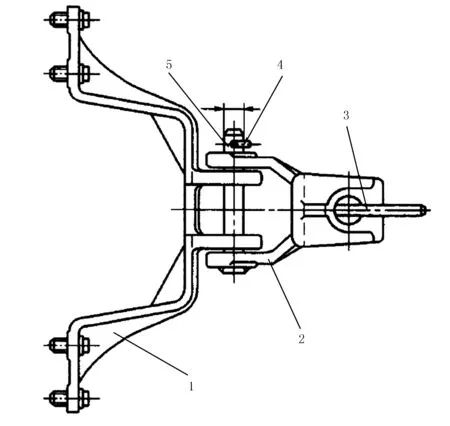
1.牵引支架 2.牵引叉 3.牵引销总成 4.锁紧销 5.长销图2 农用拖拉机牵引装置结构简图Fig.2 Structure brief diagram of the traction system of the agricultural tractor
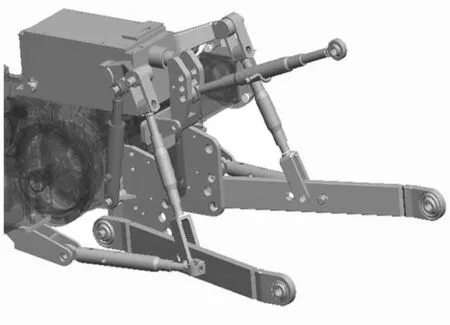
图3 农用拖拉机牵引装置连接部件外形设计Fig.3 Shape design of the connecting part of traction device of agricultural tractor
2.3 智能控制优化
根据拖拉机的工作机理,对牵引装置相关联的管路进行智能优化,管路布置如图4所示。本研究改进为全液压转向智能控制系统,基于液压能的连续控制,操纵液压伺服装置,合理分配拖拉机的驱动力。实现此功能的组件主要是恒流泵、转向器、转向油缸和管路等,应着重考虑转向油缸执行能量转换的及时与准确性。
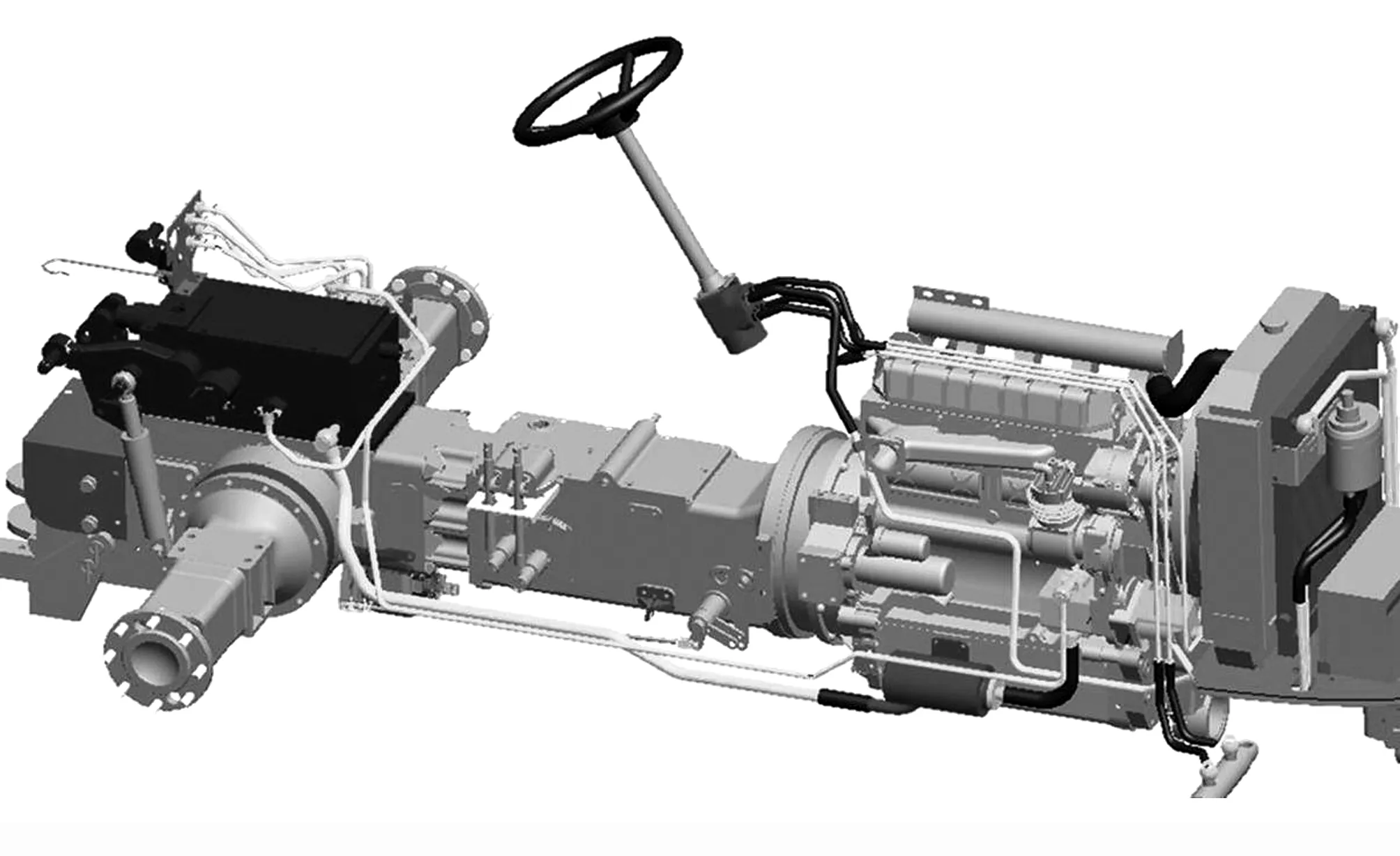
图4 农用拖拉机牵引装置智能控制管路图Fig.4 Intelligent control piping diagram of the traction device of the agricultural tractor
针对牵引装置提供力的大小,设定该农用拖拉机牵引系统力位综合调控,流程如图5所示。由控制实现功能可知:将牵引装置之前的单纯拉力传感器控制改进为力位综合调控,首先设定目标深度,经ECU后传递给液压系统,向执行装置适时发出控制命令,最终至牵引装置,实现农业机具牵引作业。当引入力位换算形成闭环调节控制,使得牵引装置控制更加精准,发力更加高效。
对该农用拖拉机的牵引装置进行智能控制,其原理图如图6所示。 工作时, 在主控制器和信号电平控制器的共同作用下,接收来自阻力传感器、位置传感器、耕深传感器的电信号,用电磁阀替换提升装置分配器,经控制器向电磁阀输出电流,实现对提升装置的调节;采取变阻尼和自动调节方式,使之与牵引装置保持在同一水平点,使运行更精确和平稳,实现智能化牵引作业。
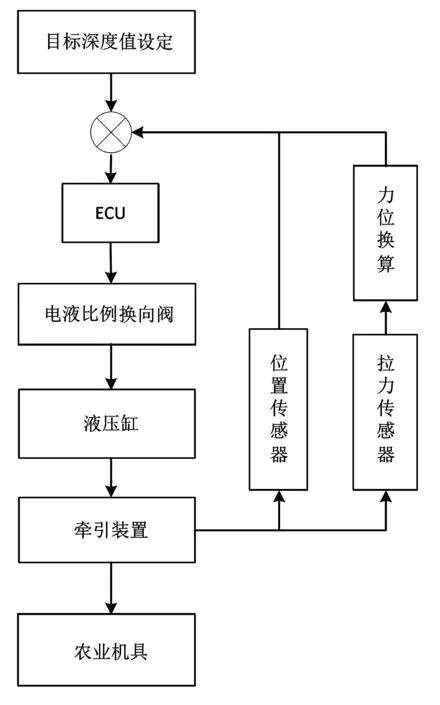
图5 农用拖拉机牵引系统力位综合调控简图Fig.5 Schematic diagram of the force level comprehensive control of traction system of the agricultural tractor

图6 牵引装置下的作业深度智能控制原理图Fig.6 Operation depth intelligent control principle diagram of traction device on the tractor
3 测试
3.1 前置条件
各项结构参数优化后进行智能化测试,结合牵引装置布置组成(见图7),测试前置条件为:
1)利用电信号进行有效实时传递;
2)各传感元部件和主要牵引装置布置合理灵活;
3)信号获取过程忽略机械磨损或液压损耗;
4)测试过程核心控制参量可调性好;
5)整个测试保证静动态控制质量等。

图7 农用拖拉机牵引装置智能化改进布置Fig.7 Intelligent improvement arrangement of the traction equipment for the agricultural tractor
3.2 过程分析
利用机械耦合模式,经规律性变换牵引力的大小和拖拉机驱动装置功率的匹配,得出如表2所示的农用拖拉机牵引装置核心参数的智能测试数据。
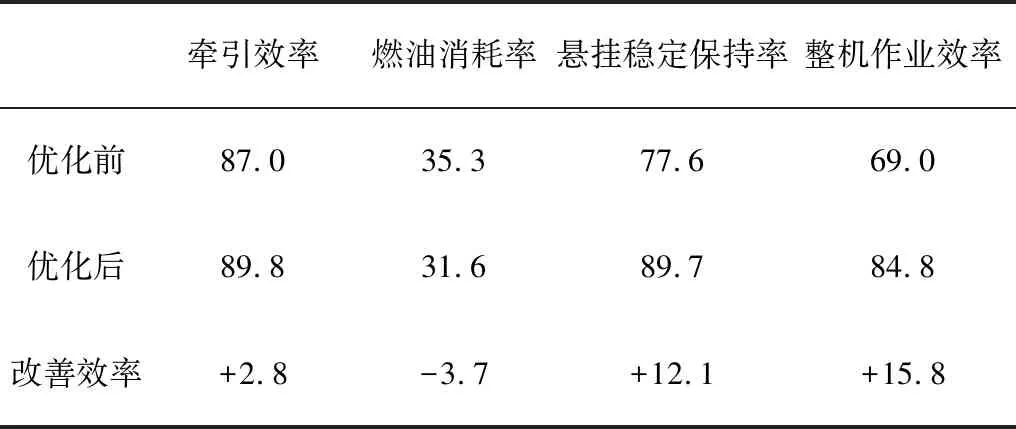
表2 农用拖拉机牵引装置智能测试数据Table 2 Intelligent test data of traction device on the agricultural tractor %
由对比可知:对比选定牵引效率、燃油消耗率(经折合换算后)、悬挂稳定保持率和拖拉机整机作业效率4个变量参数中,牵引效率在智能优化后提升2.8%,悬挂稳定保持率提升12.1%,燃油消耗率降低3.7%,整机测试运行效果良好。
4 结论
1) 通过分析农用拖拉机整机组件构成及其牵引装置的作用与机理,对牵引系统进行智能改进,形成驱动、牵引、悬挂系列部件的智能衔接和结构优化,达到改进目标,效果明显。
2) 对农用拖拉机的牵引装置进行智能化改进,进一步提升了牵引效率,降低了燃油消耗,且大大提高了农用拖拉机的整机作业效率,可达15.8%。
3) 此优化方法对拖拉机其他组件和系统改进提供了参考,具有明显的应用价值。