基于小波神经网络的旋耕装置机械故障诊断研究
2019-05-24郭庆军
郭庆军
(重庆建筑工程职业学院,重庆 400072)
0 引言
旋耕装置是现代农业机械中普及的农业装备,一般以柴油机为动力,具有质量轻、体积小及结构简单等特点,深受现代农业朋友们的青睐。但是,在生产中,常常会因为各类机械故障发现不及时,影响正常的农业种植任务。因此,及时准确地发现机械中的故障,对提高作业效率具有一定的现实意义。为了解决上述问题,利用小波神经网络技术,设计了一套旋耕装置机械故障诊断系统。
1 小波变换在故障分析中的实际应用
1.1 小波变换原理
小波变换是一种具有震荡周期性、可以立刻衰减至零的函数,可以精准地判断波形中哪一个长周期的振动最强。由基本小波φ(t)分别通过伸缩因子a与平移因子b得到的函数族{φa,b}称之为小波分析,即
(1)
其中,a、b为实数;|a|-1/2则实现伸缩与平移中能量的规一化。
在实际应用中,信号f的某一时间内连续小波变换的计算式为
(2)
若φ为符合要求的小波时,根据式(2)的小波变
换在f(t)的逆变换为
(3)

(4)
任意函数f(t)的离散小波定义为

(5)
1.2 小波变换在故障分析中的实际应用
本文在MatLab中构建一段旋耕装置机械故障信号,信号主要包含正常的200Hz信号和突变的300Hz的信号。通过采用小波变换方法阐述其在旋耕装置机械中的故障检测。旋耕装置机械故障信号如图1所示,从中很难发现故障发生时间和细节。
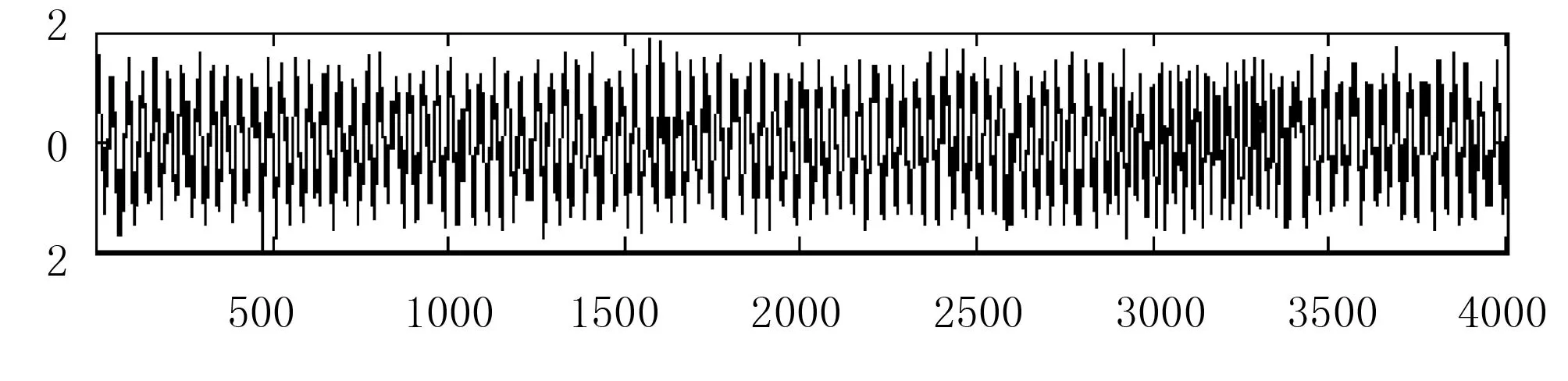
图1 旋耕装置机械故障信号Fig.1 The mechanical fault signal of rotary tillage unit
采用传统的FFT只能看出信号在3 200ms左右发生了突变,却不能发现时域信号在发生故障时变化趋势,达不到分析要求。
采用层次尺度为4的小波变换分析旋耕装置机械故障信号,结果如图2所示。旋耕装置机械故障信号经过小波变换处理后,在第4层时,已实现了突变信号的分离,低频部分(a4)突变信号消失,而高频部分(d4)对应的正是突变信号,可以准确地推断出故障发生时间和细节。仿真结果证明:在旋耕装置机械故障信号诊断中,采用小波变换的频带滤波方法,能够从复杂噪声信号中分离出故障信号,为故障诊断提供了有力依据。
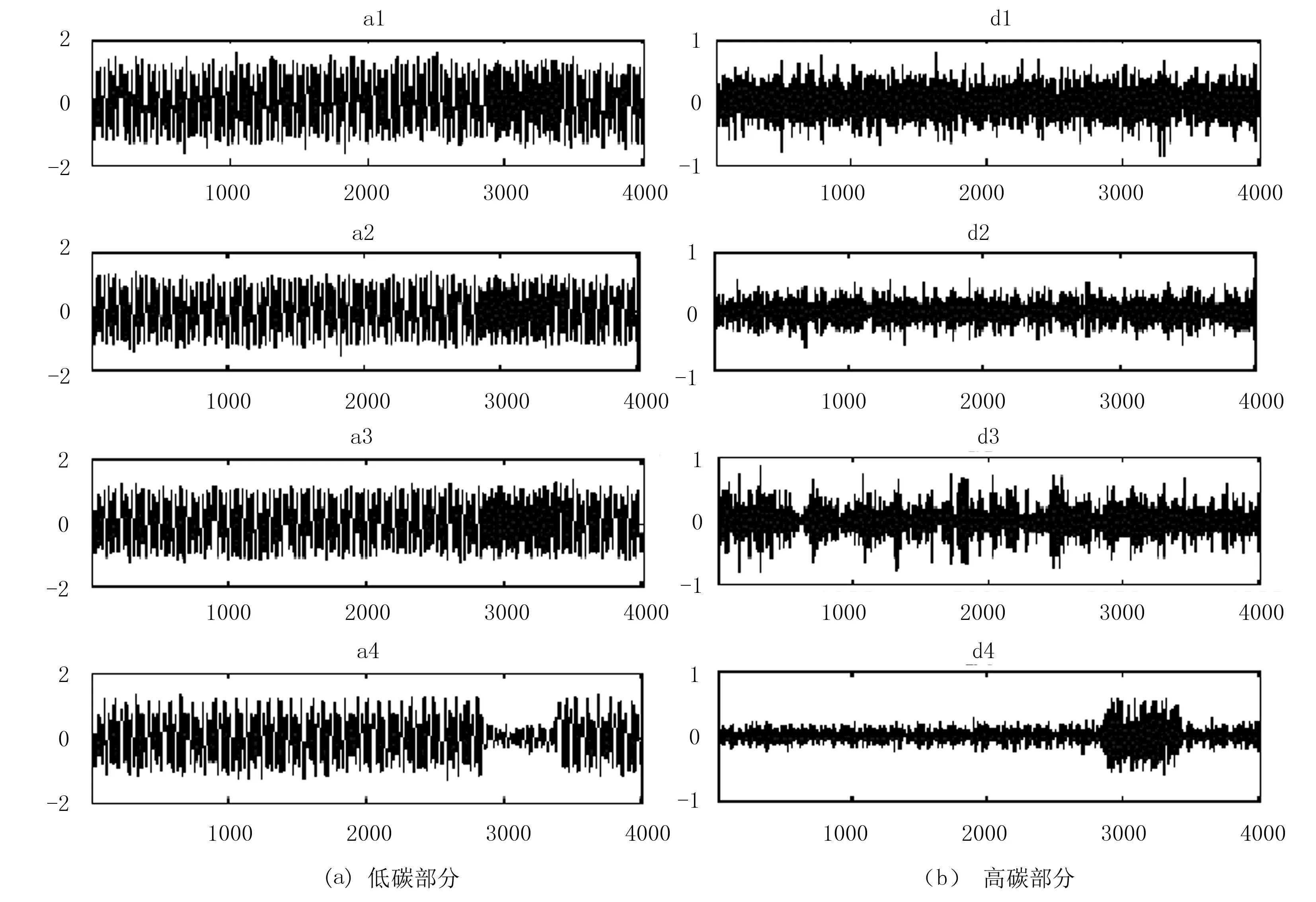
图2 小波变换分析Fig.2 The wavelet transform analysis
2 构造旋耕装置机械故障诊断的小波神经网络
本文采用3层小波神经网络模型。其中,输入层包含10个节点数;网络隐含层采用Morlet函数,共包含15个节点数;输出层的神经元数目共包含15个节点数。最后,构造旋耕装置机械故障诊断的小波神经网络结构如图3所示。
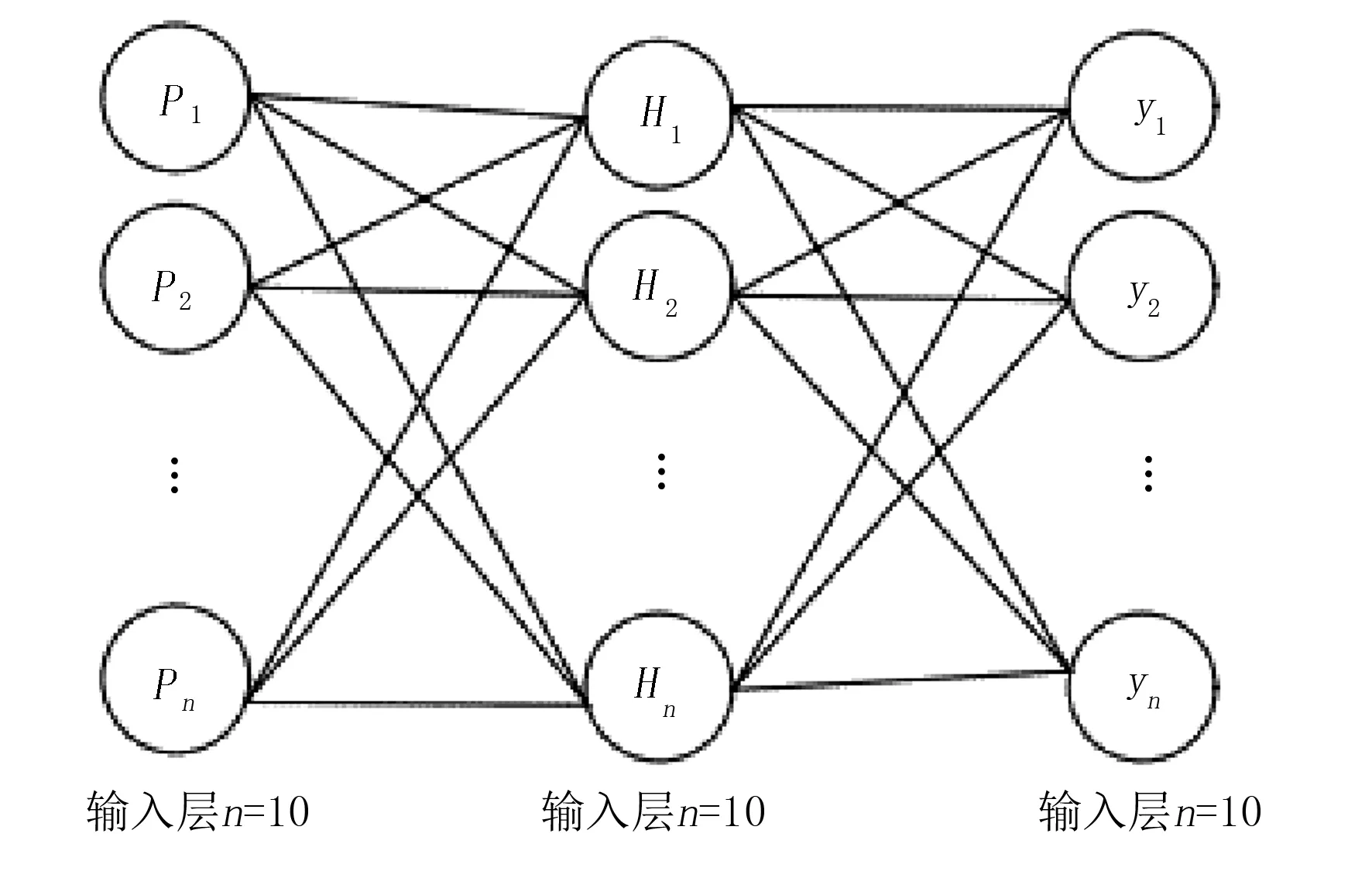
图3 小波神经网络结构示意图Fig.3 The structure schematic diagram of wavelet neural network
小波神经网络的神经元,是进行信息处理分析最关键的基本单元,其神经元结构如图4所示。
图4中,Pn为小波神经网络的输入参数;wn为小波神经网络输入层与隐含层的权值;H(x)为小波激发函数;v为神经元的阈值;y为神经元的输出结果。神经元的网络输出为
y=∑wnPn+v
(6)

图4 小波神经网络神经元结构图Fig.4 The neuron structure diagram of wavelet neural network
3 旋耕装置机械故障诊断模型建立
3.1 建立旋耕装置故障特征
经过大量的试验,建立了旋耕装置机械故障与征兆对应的表,如表1所示。研究中主要对不平衡、负荷过大、异常响动、犁刀轴不转动、脱档、万向节轴承脱落及刀片弯曲等7种故障做出小波神经网络的输出;利用振动信号的8个不同频率的谱峰能量值作为旋耕装置机械特定的故障特征,并制定出如表2所示的训练样本。
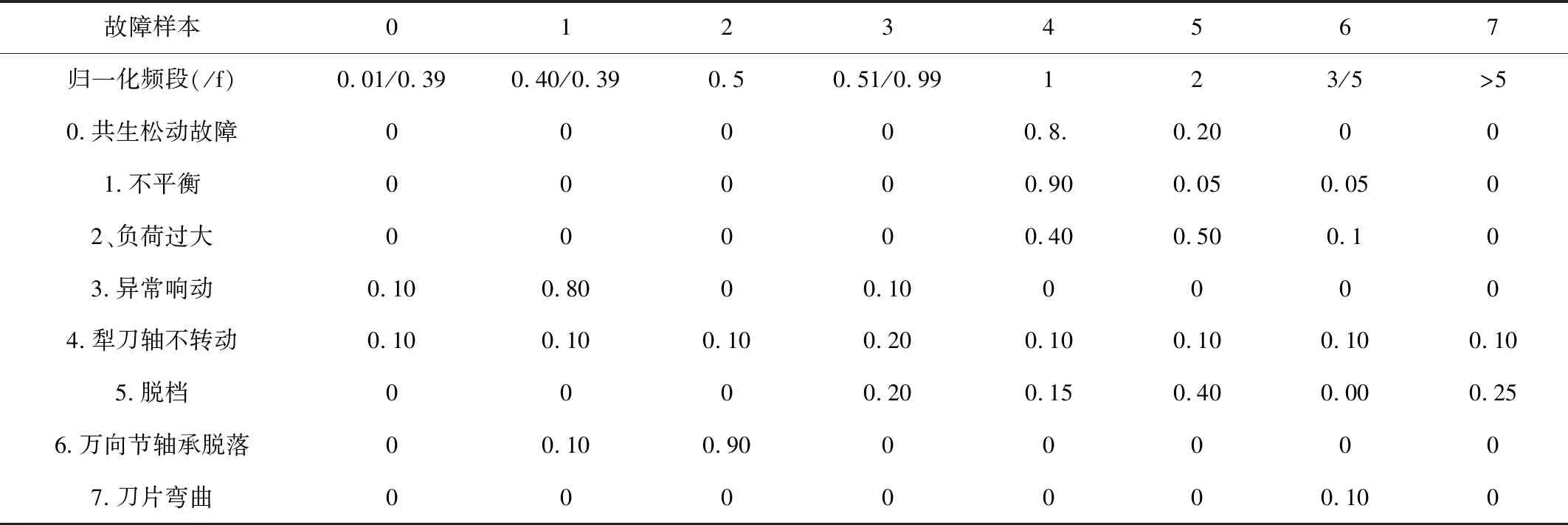
表1 旋耕装置机械故障与征兆对应表Table 1 The correspondingTable of mechanical failure and symptom of rotary tillage unit
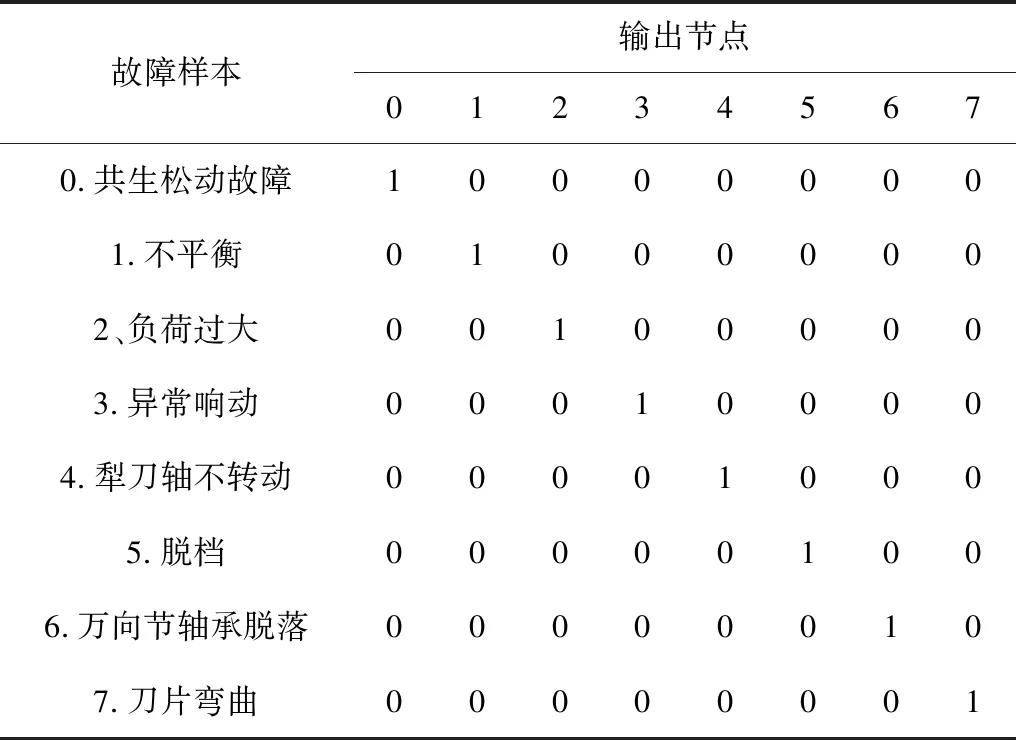
表2 训练样本的目标输出Table 2 The target output of training samples
3.2 提取特征向量
为了比较方便地提取旋耕装置机械故障的特征向量,本文将多分辨率分析应用到功率谱的特征提取上。具体的实现方法如下:
1)设定旋耕装置的振动信号采样为1 024点,频率为12.8f,其中f为工频;
2)计算旋耕装置的振动信号功率谱(频率分布在0~6.4f之间);
3)采用4层小波分解振动信号功率谱,最终提取第4层分解的逼近部分(频率间隔为0.1f);
4)参照表1,在8个功率谱段中提取特征向量x(n),n=0,1,…,7,最后进行归一化处理分析。
3.3 建立小波神经网络模型
根据前文的研究与分析,本文选用3层的小波神经网络,输入层单元数为8,对应旋耕装置机械故障的8个频率特征量,输出层单元数为8,对应9种旋耕装置机械故障,隐层单元数为8。小波神经网络结构如图5所示。
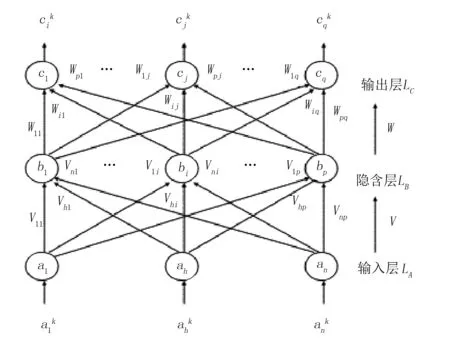
图5 小波神经网络结构图Fig.5 The structure diagram of wavelet neural network
假设不包含输入层,其有N0个元,设某网络有L层,输出为第L层,第L层有NK个元;uk(i)为第K层第i神经元采集到的信息;wk(i,j)为从第k-1层第j个元到第k层第i个元的权;ak(i)为第k层第i个元的输出,各层之间的神经元都有信息交换。则其输入输出关系可以表示为
(7)
神经网络算法的步骤为:
Step1:设定学习的输入数据,p=1,…,p,确定初始权矩阵W(0);
Step2:用学习数据计算网络输出;
Step3:用式(2)反向修正,直到用完所有学习数据。
3.4 小波神经网络模型的训练
采用梯度下降法对应用于旋耕装置机械故障的小波神经网络进行训练,经过3 000次训练后得到了训练目标,实际计算出的网络误差为3.905 8×10-5。样本训练的输出结果如表3所示。
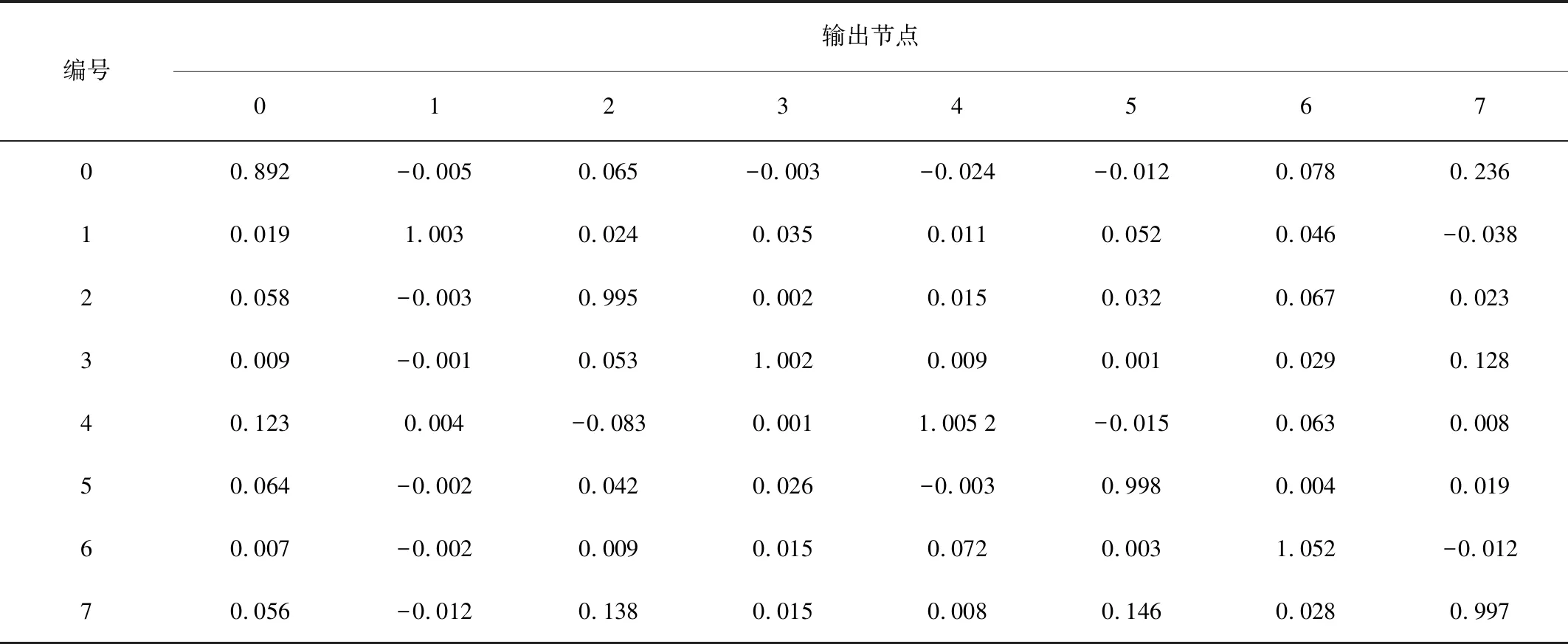
表3 样本训练的输出结果Table 3 The output results of sample training
4 故障诊断模型的验证与分析
为了验证旋耕装置机械故障诊断模型可行性和准确性,采用MatLab仿真软件训练和测试小波神经网络模型。试验中,从旋耕装置机械平台中采集到了其在共生松动故障时的机械振动信号样本(见图6中的原始信号),试验验证结果如表4和表5所示。
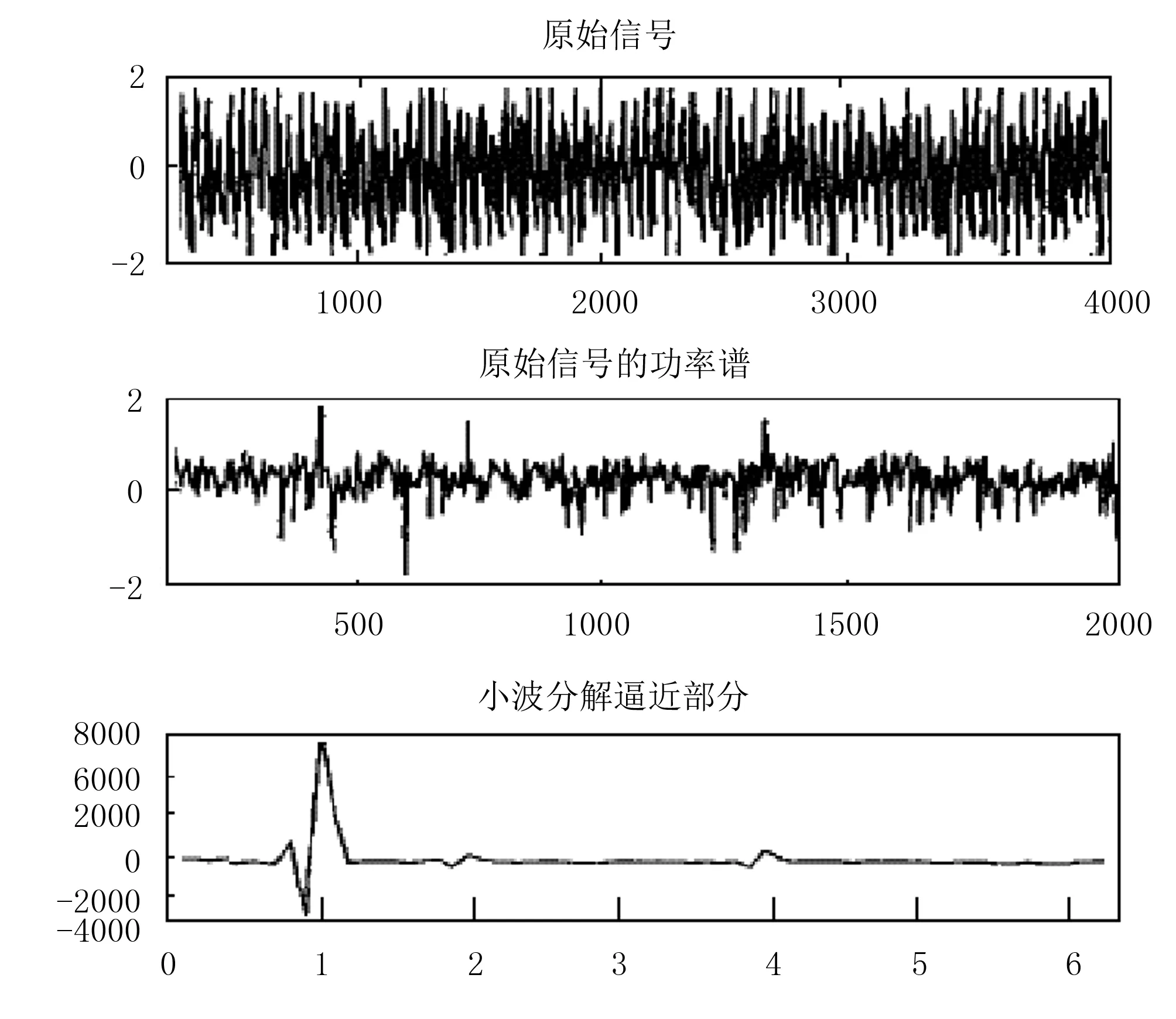
图6 旋耕装置机械故障诊断模型的验证结果Fig.6 The verification result of mechanical fault diagnosis model for rotary tiller
图6中:上图为机械振动信号的原始样本,中图为原始样本的功率谱,下图为小波神经网络的4层分解逼近部分。
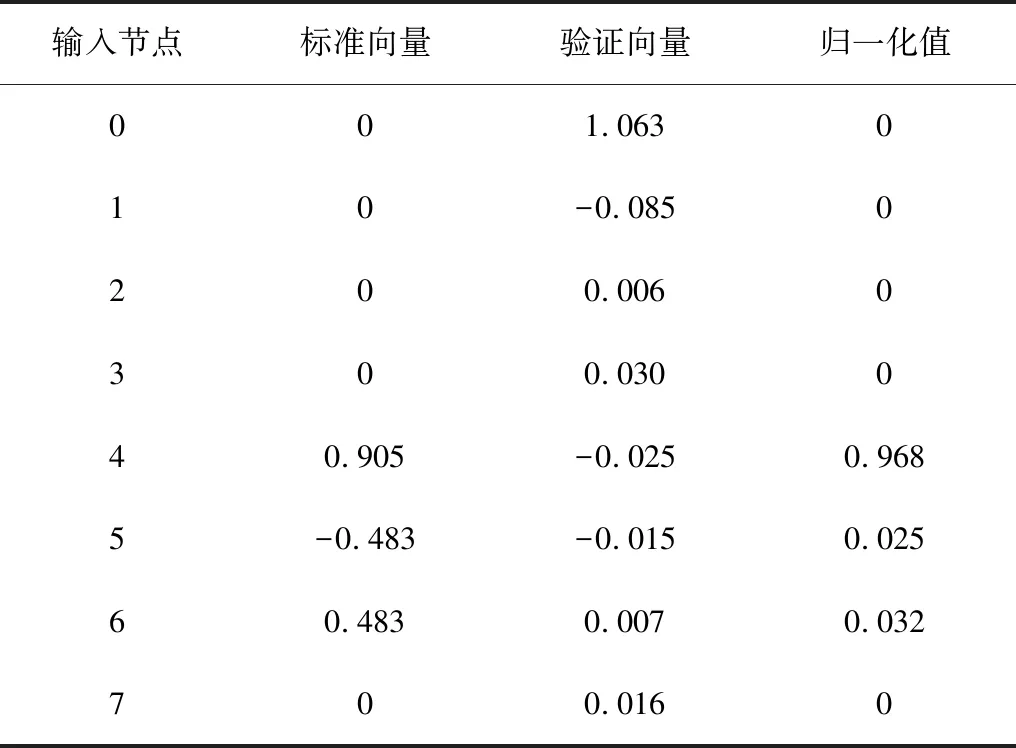
表4 样本的网络输入Table 4 The sample network input
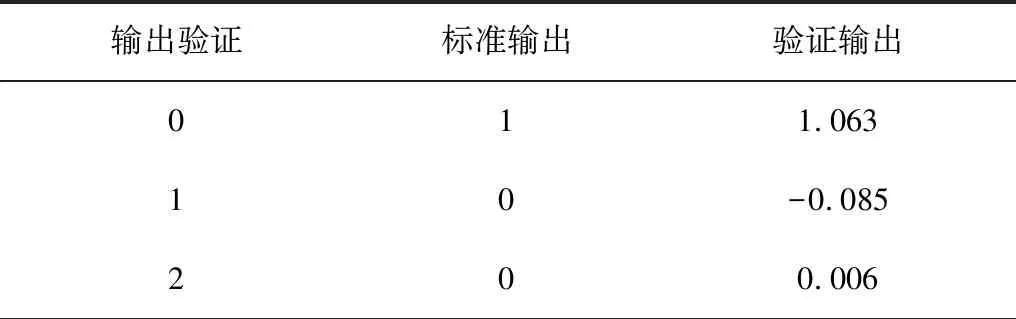
表5 样本的网络输出Table 5 The sample network output
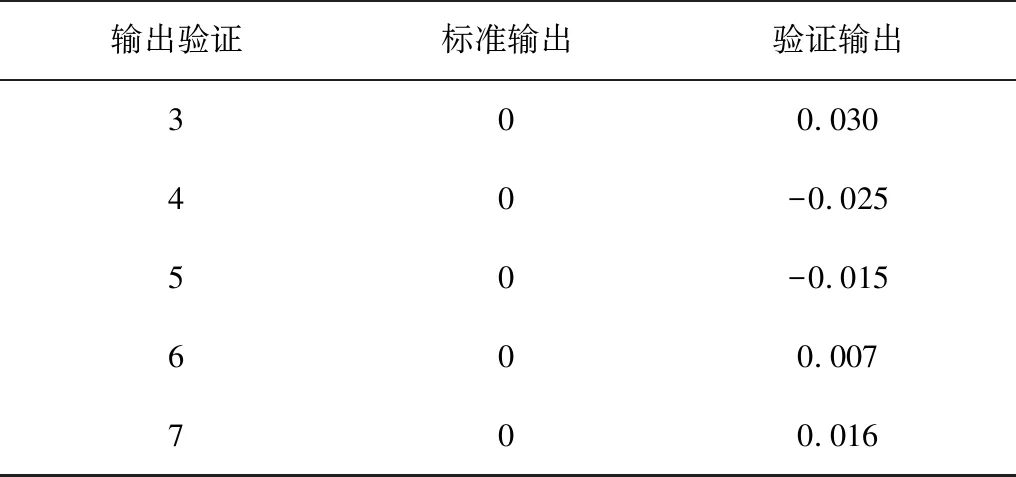
续表5
从验证结果可以看出:小波神经网络通过样本学习,可以对旋耕装置机械故障数据进行“误差逼近”检验,能够确定故障数据最为“逼近”的样本故障信息。其中,待检故障信号第0个节点输出值为1.063,其他节点值的绝对值均未超过0.030,诊断结果表明旋耕装置为共生松动故障,与实际故障吻合。试验表明:小波神经网络具有“泛化”能力,能够准确检测旋耕装置的机械故障,可以为设备维护人员提供重要的参考。
5 结论
将小波变化和神经网络算法相结合,利用小波神经网络和Morlet函数算法,作为旋耕装置机械故障特征信号的采集方法,通过建立旋耕装置故障特征和提取其特征向量,实现了对旋耕装置机械故障的实时诊断。通过对旋耕装置机械故障诊断模型的验证与分析,可以得出:该诊断方法具有“泛化”能力,能够准确检测旋耕装置的机械故障,可以为设备维护人员提供重要的参考。
