农业机器人路径识别自主导航系统——基于STM32与物联网
2019-05-24吴赛燕
杨 辉,吴赛燕
(太原工业学院 电子工程系,太原 030008)
0 引言
我国是农业生产大国,人口基数和对农产品的需求量都极大,因此农业一直以来都是国民经济的重要基础[1]。但是,与发达国家相比,我国的农业生产力水平较为落后,主要表现在:①我国南北方地势差异很大,北方以平原为主,适合规模化生产;南方大部分地区的地貌多样,呈现出山地、丘陵和平原并存的局面,限制了农业的规模化发展。②我国幅员辽阔,但人口众多,每户农民耕作的土地面积有限,很大程度上影响了规模化的进程。③种植者的装备普遍落后,生产效率和利润都很低,极大地影响了农业生产的积极性[2]。近年来,互联网和机器人技术日益成熟并推广应用,使得农业机械的规模化和智能化越来越受到人们的关注[3]。我国每年的粮食需求量不断增长,但是城市化发展导致农业劳动力大量流失,原有的农业劳动力也进入了老龄化阶段,在这种严峻的形势下,大力推进农业生产的规模化和自动化对农业的可持续发展具有重要意义[4]。
相比于之前应用的农业机械,新兴的机器人技术具有更多的优点。利用机器人的智能化进行实时定位、自主导航和操控,控制的精确度较高,极大地方便了农业人员的管理和操作[5]。
现代机器人安装了与人类相似的感知系统,这些感知系统的核心是传感器,能够接收和传递信号。定位导航是农业机器人的必备功能,一般是通过安装GPS和视觉传感器形成机器视觉系统[6-7]。目前,已经有多种类型的农业机器人安装了视觉技术,使其能够实现自动除草、果实采摘及果实分级分类等农业活动。通过机器视觉技术,农业机器人能够自主完成目标的识别、环境监测和行走导航[8],不仅可以减轻操作人员的工作强度,还能在很大程度上提高农业生产效率。通过使用机器视觉导航,可以实现自主操控,节省了生产时间,降低了事故发生率,农业人员的生命和财产安全也得到了保障[9]。
本文设计了基于STM32和物联网技术的自主导航系统,对农业机器人的行走路径识别提供了视觉平台。该系统采用STM32嵌入式芯片控制GSM接入物联网服务器并发送GPS定位数据,然后根据机器视觉识别结果进行导航操作。视觉识别对象为南方某村庄的玉米田垄沟,具有一定的代表性,研究结果具有很大的实际意义和应用价值。
1 导航系统
1.1 定位系统介绍
STM32单片机系列的微控制器以32位为主,并基于ARM-Cortex-M处理器实现控制功能。STM32单片机能够支持32位的应用功能,主要包括准确的实时定位功能、快速的数字和信号处理功能。另外,单片机在使用过程中功耗比较低,能够进行低电压操作,也拥有一整套的完全集成和易于开发的电路。目前,市场上的生产线应用了STM32的产品非常多,主要是因为其内核具有严格的工业标准,且拥有大量的实时工具和软件提供支持。无论是小的终端服务区还是功能齐全的大型平台,以STM32单片机为主系列芯片都是使用者理想的选择。
物联网技术主要是实现普通物理对象进行互通的互联网技术,其英文名称叫做“The Internet of Things”,两种异构网络(无线传感网络和互联网)的互通主要就是靠物联网技术实现的。物联网的应用广泛,目前已经延伸到了智能农业、医疗设备、智能家居和物流交通等方面。发展物联网技术的最终目标是利用多种传感器实现各种形式的人和物之间的沟通和联系;然后,再利用现有的互联网络技术通过网关进行传输数据,互相交换信息,实现人与人、物与物和人与物的密切联系。
该农业机器人路径识别自主导航系统主要采用STM32嵌入式系统、全球移动通信系统(GSM)、全球定位系统(GPS),以及TMS320DM642图像采集与处理系统。STM32嵌入式系统、全球移动通信系统(GSM)及全球定位系统(GPS)主要实现其目标定位功能,如图1所示。定位系统主要由跟踪设备、物联网和监护设备3大部分组成。TMS320DM642图像采集与处理系统主要实现目标跟踪、路径识别和自主导航功能。
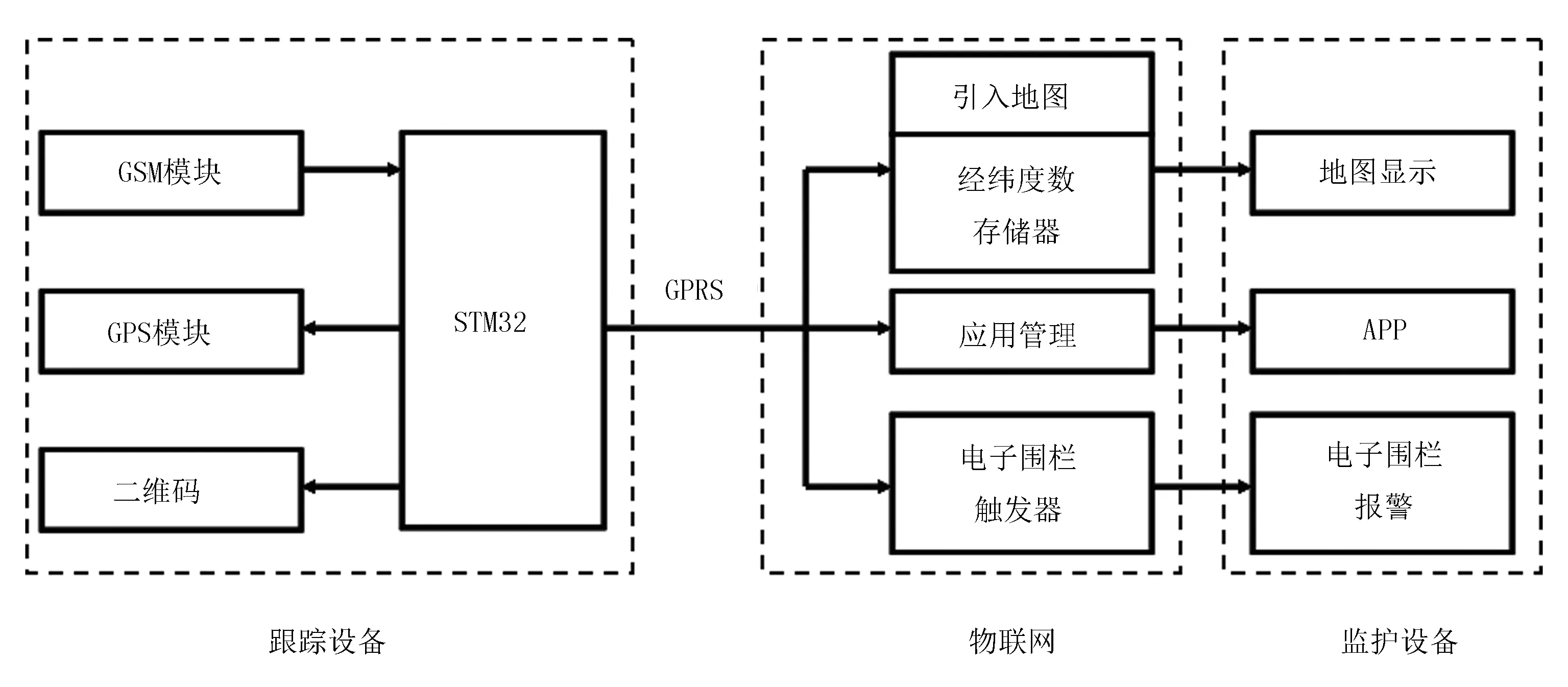
图1 目标定位系统的总体框架Fig.1 The overall framework of the target positioning system
1.2 跟踪设备设计
1.2.1 核心控制器
该系统的跟踪设备核心控制器选用的是STM-F103ZET6型号的主体芯片。该芯片是基于Cortex-M3内核的32位微控制器,输出电压的范围为2.0~3.6V,最大工作频率为72MHz。微控制器中配置静态存储器,能够支持CF卡、SRAM、PSRAM和NOR/NAND。该系统还包括数模转换器、DMA控制器和I/O接口,能够大量支持不同类型的信号接口。
1.2.2 芯片模块
该系统的GPS和GSM芯片选用的是SIM868模块,工作频段为850、900、1800、1900MHz。GPRS的传输率为86.5kbps,GPS定位精度高,工作电压大约在3.4~4.4V左右。STM-F103ZET6将AT指令发送到SIM868芯片中,然后SIM868芯片控制器将GPS所接受到的卫星定位信息通过通用分组无线服务技术网络发送出去。
1.3 物联网技术方案
数据传输主要采用的是GPRS网格方案,利用 GPRS网络的优势对大量的数据进行处理后进行传送,提高传输信息的效率。一般情况下,通过创建一个新的服务器,实现对传输数据的接收,主要是利用服务器中固定IP地址。为了长期保存所接收的数据,还需要建立一个新的数据库,使得客户在使用移动设备上网时,监护设备可随时对IP地址的服务器进行访问,通过反复查询建立的新数据库,从而获取跟踪端发来的定位信息。
目前,国内有着较多的物联网平台,本文所使用的物联网平台为ONENET;采用EDP协议和SDK,SIM868模块通过STM32芯片进行控制,再通过GPRS连入物联网。
2 农业机器人路径自主导航
本文以玉米田垄沟为研究对象,通过接收GPS传来的定位信号以后,农业机器人根据定位信息及对自身摄像机所拍摄的图像进行分析来进行导航行走。图2为玉米田中的垄沟图。在进行导航之前,机器人自身会对图像进行预处理。在研究过程中,对自然的图像进行完美的建模具有很大的难度,因而采取的方法是通过提取图像中的关键信息,然后建立初始模型,获取农田垄沟图像特征,来分析农业机器人的导航行走路径。

图2 农田垄沟原始图Fig.2 Corn field ditch original illustration
通过图像分割技术可以把初始图像分割成不同的集。分割依据是针对问题的兴趣程度,在实际应用中对遇到的目标(图像中有独特性的区域)进行比较,有兴趣时分割程序就会停止。玉米田垄沟灰度图如图3所示。

图3 玉米田垄沟灰度图Fig.3 Corn field ditch grayscale
本试验采用阈值分割,对农田垄沟实地考察后选择阈值。农田垄沟图片分析获得灰度直方图后选取最佳相应阈值。农田垄沟灰度直方图如图4所示。直方图单峰效果较明显,为了能够更加贴近机器人运行时的实时环境,选取灰度直方图中的峰顶的116处作为阈值,阈值分割后的图像如图 5所示。
农田垄沟图像经过预处理后,若直接进行回归分析,会得到较复杂拟合结果和大量数据,降低系统的识别速率和影响信息的显示。因此,需要利用特征提取方法,将拟合得到的多元回归变成简单的一元回归拟合,提高实时操作性[10-14]。在特征提取之后,本文采用Canny算子对农田垄沟特征提取图进行边缘化处理。通过运用Canny算子,农田垄沟特征提取图具有良好的边缘性能,处理过程中,边缘基本不会中断,提取边缘中点变得更加简易,如图6所示。

图4 玉米田垄沟灰度直方图Fig.4 Corn field furrow gray histogram

图5 玉米田垄沟阈值分割后的图像Fig.5 Corn field ditch value segmented image

图6 玉米田垄沟边缘提取Fig.6 Edge extraction of ditch in corn field
农田垄沟图像通过边缘处理后,整理得到一系列边缘信息。根据得到的边缘信息标定到两边边缘的中点坐标位置,即农业机器人的行驶路径,如图7所示。
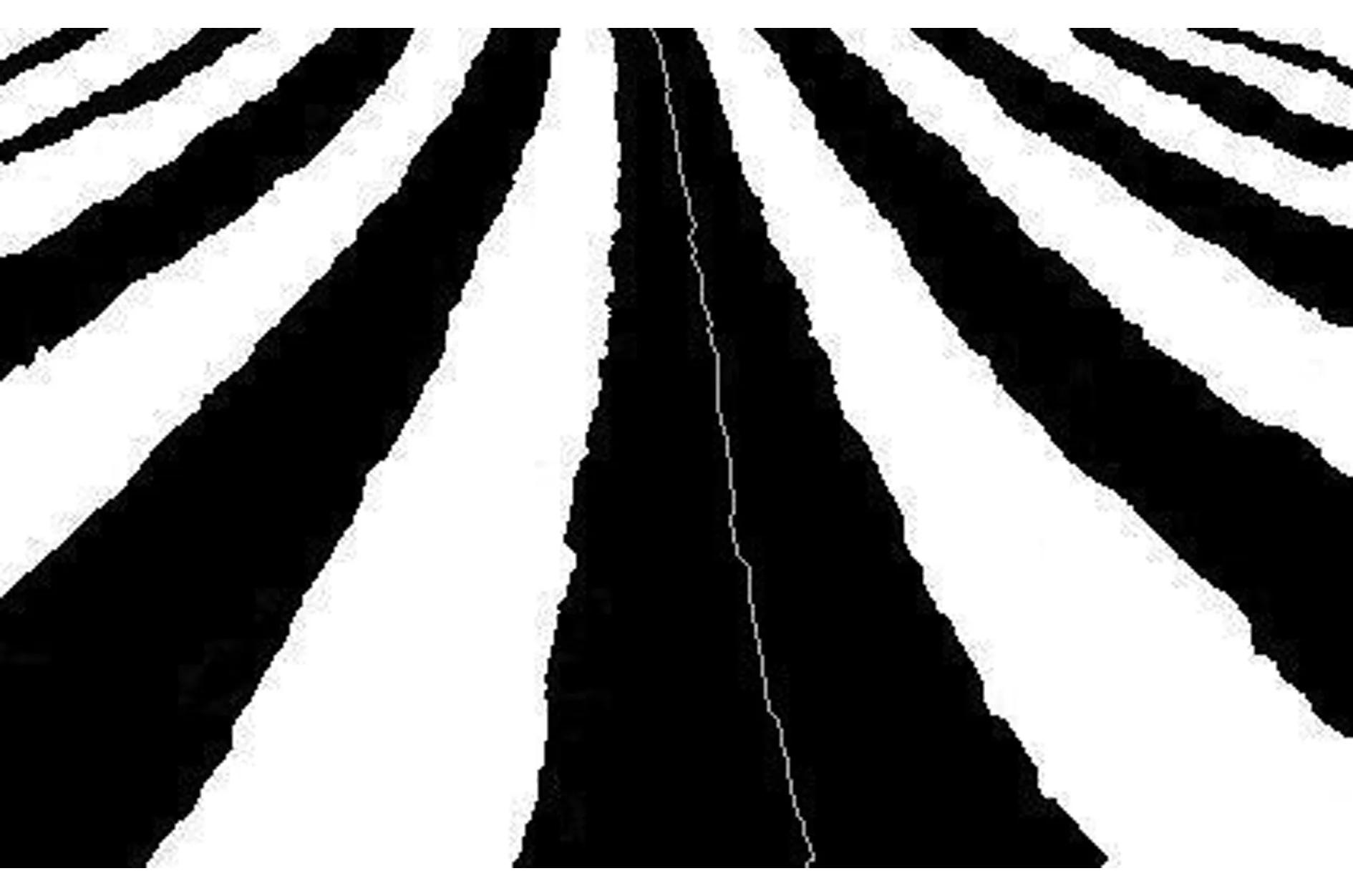
图7 机器人的路径识别Fig.7 Path recognition of robot
3 结论
主要介绍了一套基于STM32及物联网的农业机器人定位及路径导航行走系统。跟踪端GSM芯片在STM32的控制下通过GPRS网络发送GPS定位数据信息,然后农业机器视觉系统根据所在环境拍摄图像分析获得行走路径,以完成导航任务。该系统能够大量应用在农业生产技术中,包括种植管理、喷洒农药及果实采摘等,极大地减轻了我国农业生产人员的劳动强度,能促进农业生产效率,对于推动农业的现代化具有重要意义。