基于ARM的联合收割机谷物产量计量系统的研究
2019-05-24方华丽
方华丽,雷 蕾
(河南工业职业技术学院,河南 南阳,473000)
0 引言
随着农地集约化管理的深入改革,现代化农业对大型农机的需求将继续加大。联合收割机是农业现代化的重要机械设备,实时获取农业种植区域的产量信息是联合收割机的核心功能,也是来年精准变量作业的主要依据。为此,以解决联合收割机谷物产量计量为出发点,采用了一种压力测产传感器,设计了一套基于ARM的联合收割机谷物产量计量系统,并开展了田间动态试验,以验证系统的稳定性和可靠性。
1 测产传感器对比与选型
1.1 两种测产传感器对比
联合收割机测产传感器主要有压力传感器和声学传感器两种,本文研究对比的两种传感器都包含1块用于测量谷粒流量的60mm×40mm的矩形冲击板。压力传感器由聚氯乙烯制成的冲击板和具有八角形环的应变式力传感器组成,结构示意如图1(a)所示。声学传感器由钢板和压电晶体耳机组成,结构示意如图1(b)所示。
两个传感器的采样频率均为10kHz。其中,压力传感器设置了一个2kHz的低通滤波器,而声学传感器则没有设置2kHz的低通滤波器。为了减少螺旋钻产生的振动噪音,特地将测产传感器独立安装在粮箱上的横梁上,为了选择合适的传感器,同时安装了压力和声学两个测产传感器,通过对比试验选择效果较好的传感器,安装效果图如图2所示。

(a) 压力传感器结构
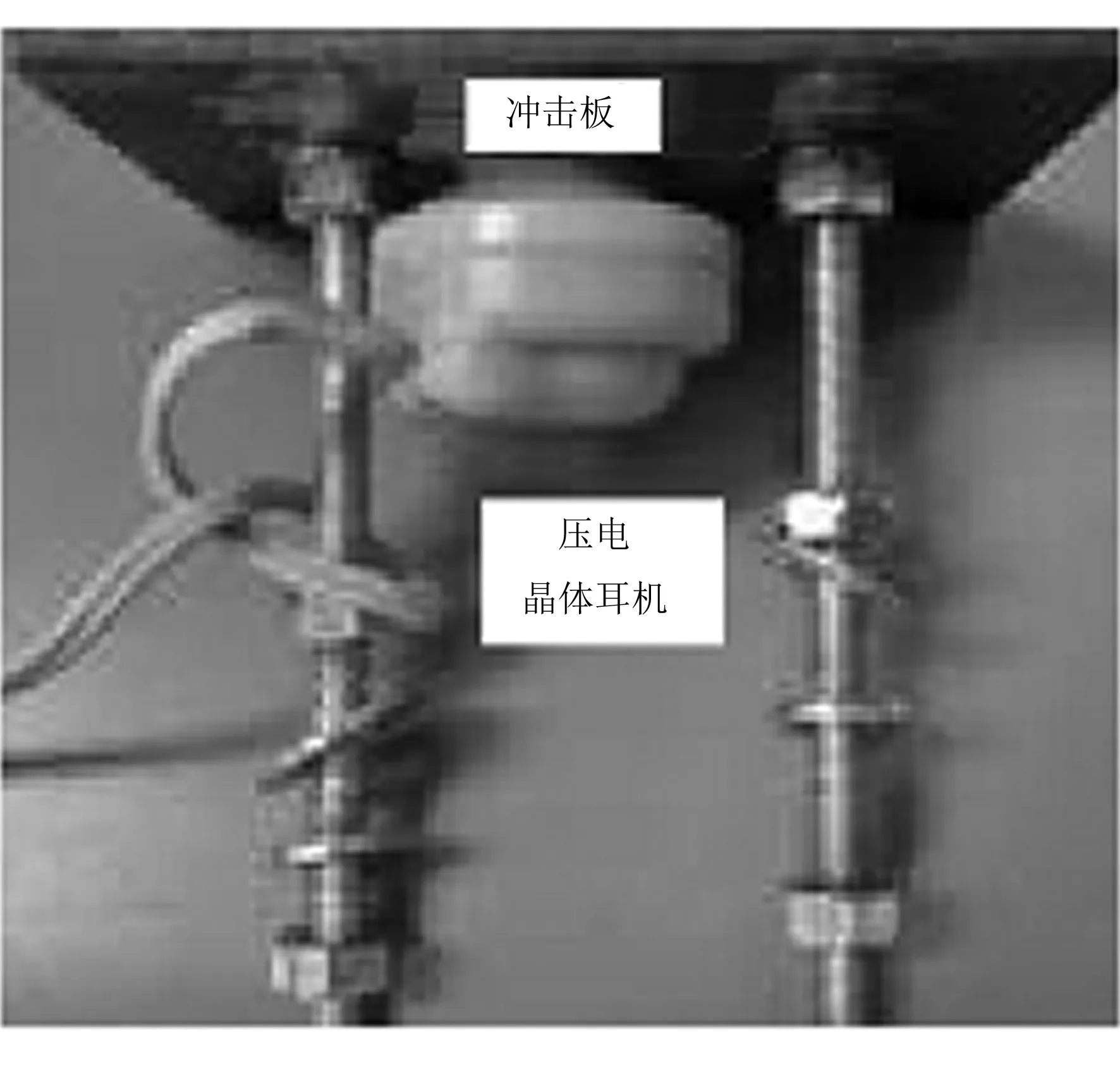
(b) 声学传感器图1 两种传感器结构示意图Fig.1 The schematic diagram of two kinds of sensor structures
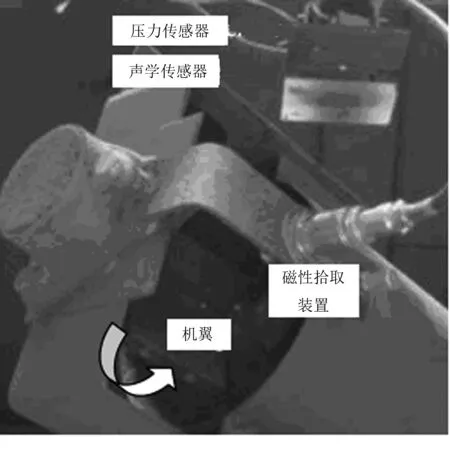
图2 传感器安装位置Fig.2 Sensor installation position
当谷粒搅拌器以低速(7~10Hz)旋转时,谷物的动量不足,无法通过传感器产生明显的重量信号,因此在螺旋钻的上端添加一个机翼,以便其可沿径向散射颗粒(见图3);另外,采用磁性拾取装置检测谷粒刨机的时间和转速,方便测量谷粒的质量信息。

图3 谷物螺旋发射谷粒示意图Fig.3 The grain sketch diagram of grain spiral emission
通过实际的应用对比,发现压力传感器的测量精度较声学传感器要高,因此选用压力传感器作为联合收割机谷物产量计量系统的测量设备。
1.2 测产传感器应用原理
联合收割机在正常作业过程中,作物从收割台进入,由输送装置喂入至脱粒装置处,经过脱粒、谷穗分离后集中到储藏仓,然后由传送带将粮食送到运输车上。测产传感器应用结构如图4所示。作物产量由测产系统通过收获的作物质量、面积及谷物含水率计算得到。产量计算表达式如下:
Y(xi,yi)=KM/WS
(1)
其中,Y为联合收割机瞬时产量值(kg/m2);(xi,yi)为瞬时产量测量时收割机的坐标;M为压力传感器测得谷粒的流量值(kg/s);W为割台宽度(m);S为联合收割机前行速度(km/h);K为产量计算的单位转换系数。
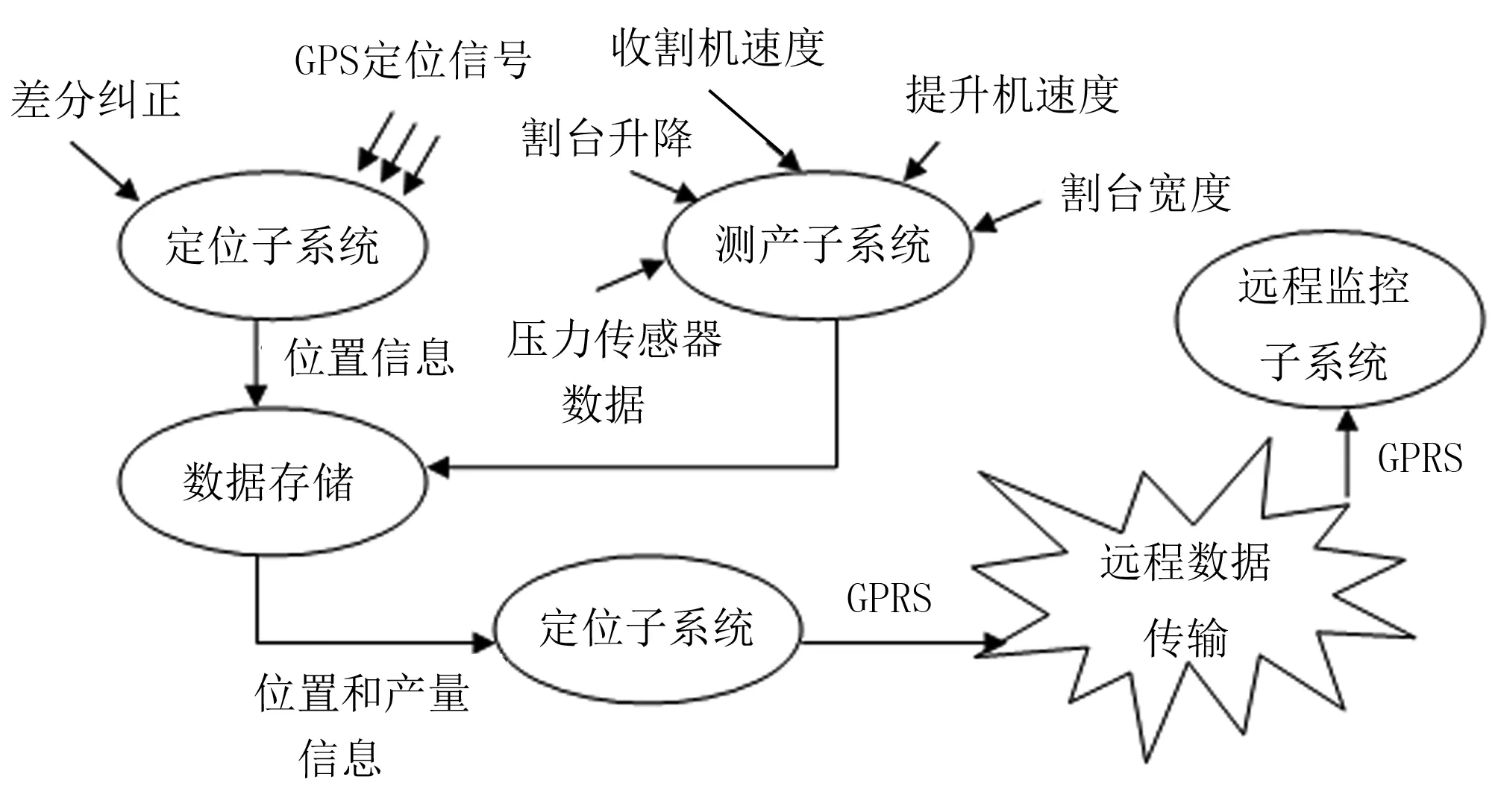
图4 测产传感器应用结构框架图Fig.4 The structure frame diagram of sensor application
2 产量计量系统整体框架
联合收割机谷物产量计量系统主要包括远程监控与管理系统、测产子系统和智能手机终端查询子系统等3个部分,是基于GPS、GPRS、传感器和ARM微处理器组成的集成系统。联合收割机测产系统整体框架如图5所示。
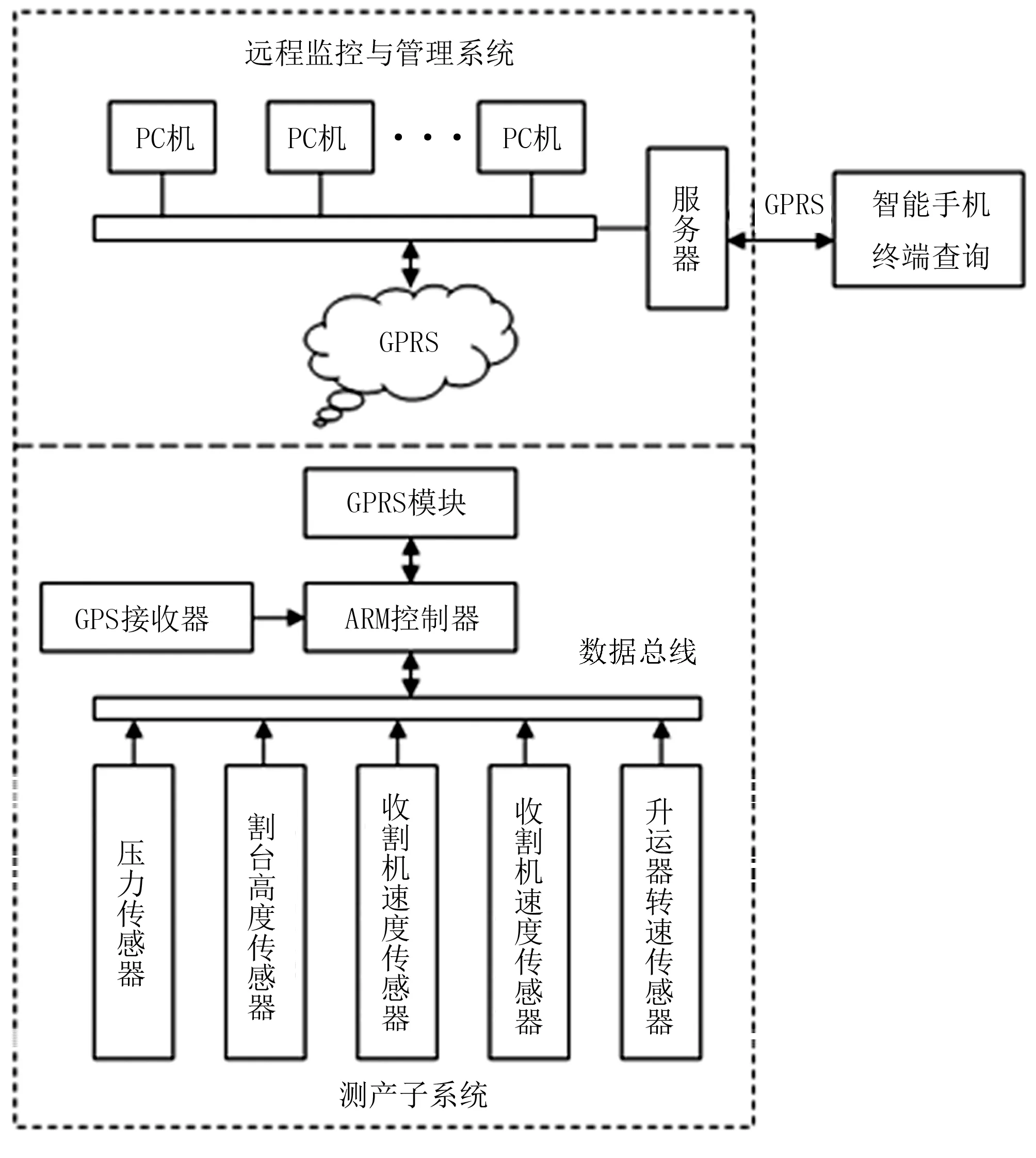
图5 联合收割机测产系统整体框架图Fig.5 The overall frame chart of the production system of a combined harvester
当联合收割机测产系统工作时,ARM微处理器采集传感器组的谷物流量、收割机前行速度、割台高度和收割机前行速度等参数信息,然后微处理器进行单位面积的干重产量计算,最后将产量实时显示在显示终端上和存储至SD卡;此外,测产子系统还会通过GPRS无线传输网络实现与远程监控和管理系统的通信,实时将产量信息发送到远程监控和管理系统。
联合收割机谷物产量计量系统各部分功能如图6所示。

图6 联合收割机谷物产量计量系统各部分功能Fig.6 The functions of combine harvester grain output measurement system
3 谷物产量计量系统的软硬件设计
3.1 谷物产量计量系统硬件设计
联合收割机谷物产量计量系统的硬件部分主要由S5PV210微处理器、存储单元、外围电路、CF卡、压力传感器、GPS、速度传感器、WiFi无线模块、复位电路、电源管理电路,以及液晶显示屏组成。联合收割机谷物产量计量系统的硬件框架如图7所示。

图7 联合收割机谷物产量计量系统硬件框架图Fig.7 The hardware frame diagram of grain yield measurement system for
combine harvester
1)压力传感器信号处理电路。产量计量的压力传感器电路是整个系统最为核心的部分,作物收割质量由数据采集电路将质量信号转化为峰值信号,而该峰值电压是表征谷物撞击信号的另一个重要指标。由于谷粒碰撞和初始速度的随机性,产生的信号峰值电压可能是正的或负的。为了精确地获取峰值电压,设计了一个由精确检测器和加法器组成的信号处理的放大器,其电路如图8所示。压力传感器信号处理电路的原理为
(2)
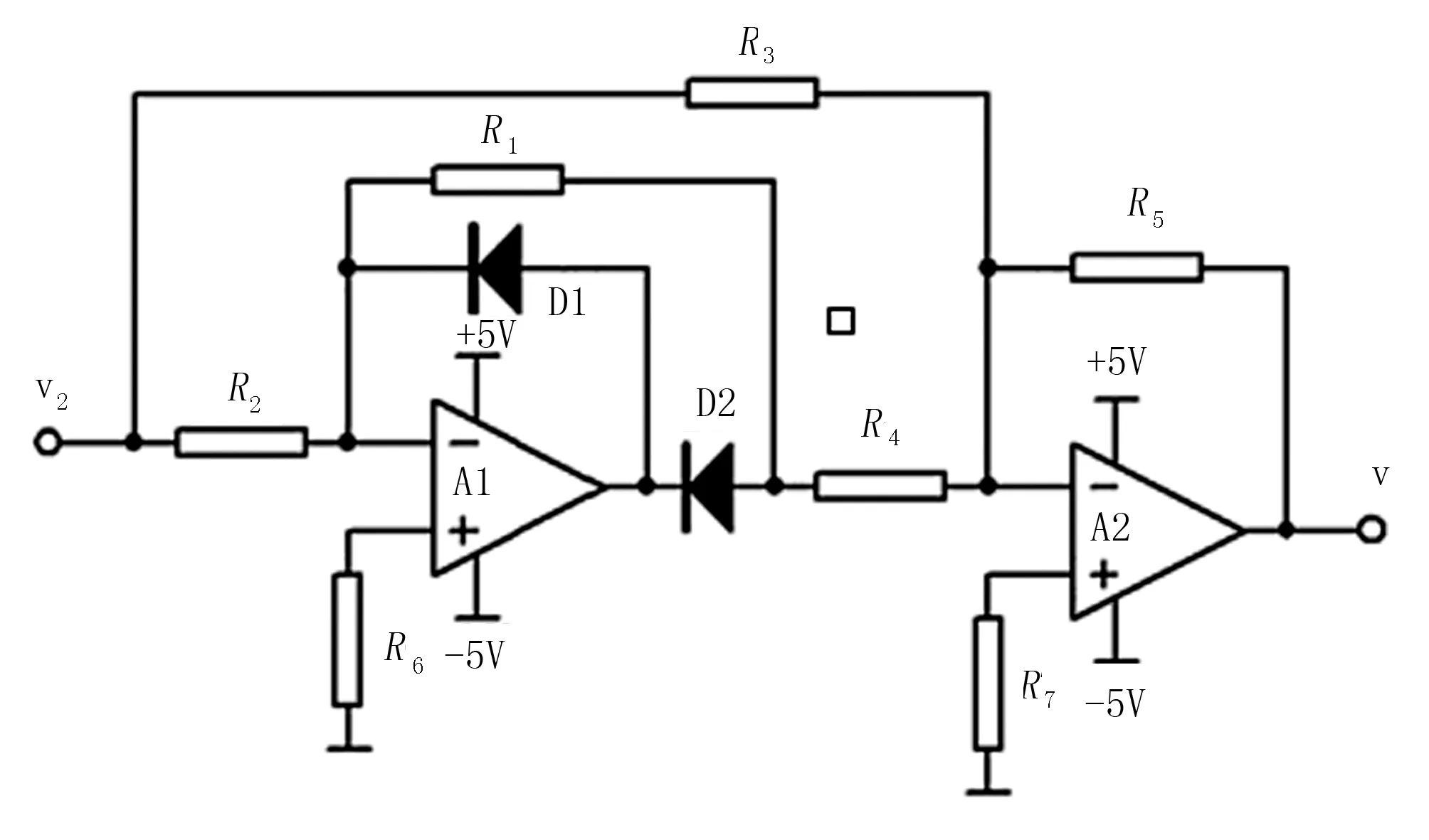
图8 压力传感器信号处理电路Fig.8 The signal processing circuit of pressure sensor
2)GPS单元功能设计。本文采用GPS差分定位实现联合收割机的位置坐标定位功能,其工作原理为:安装1台GPS信号接收器在地面的已知点作为基准站,并与安装在联合收割机上的GPS接收器进行同步测量。基准站的GPS可以测出所有移动卫星的伪距ρi和采集星历文件,然后根据采集的星历文件计算卫星的某一时刻的位置坐标(Xi,Yi,Zi)。GPS运行原理结构如图9所示。
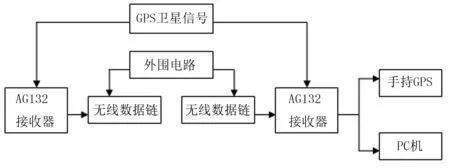
图9 GPS运行原理结构Fig.9 The principle structure of GPS operatio
根据基准站的坐标(Xb,Yb,Zb)和卫星的瞬时坐标(Xi,Yi,Zi)可以计算出基准站的实际距离,即
(3)
其中,i为第i颗卫星。
伪距修改值为
Δρi=Ri-ρi
(4)
伪距修改值的变化率为
(5)
安装在联合收割机上的GPS接收器根据伪距修改值△ρi和变化率△ρi′,对计算出的伪距ρimeas(t)继续修正,得到修正表达式为
(6)
可以得到联合收割机上的GPS坐标为
(7)
其中,dτ和v为GPS接收器的时钟差值与噪声。
根据式(7)便可以算出联合收割机上的GPS坐标(X,Y,Z)。
3.2 谷物产量计量系统软件设计
测产子系统是联合收割机谷物产量计量系统软件设计的核心,本系统设计各传感器采集频率为0.1s,A/D转换去采集8次取平均值的结果,谷物产量值记为Mi。测产子系统程序流程如图10所示。
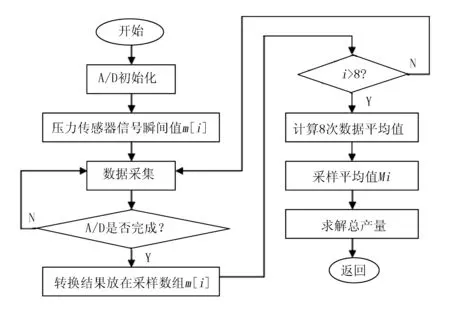
图10 测产系统主程序流程图Fig.10 The flow chart of the main program of the production system
4 试验与结果分析
联合收割机谷物产量计量系统田间试验于2018年5月小麦收获季节在某小麦种植示范区进行,小麦品种为冬麦230,小麦面积20hm2,天气晴,温度26~30℃;联合收割机割台宽度为220cm,喂入量为6kg/s。为了提高试验的可靠性和准确性,共进行5次测试,测试结果如表1所示。
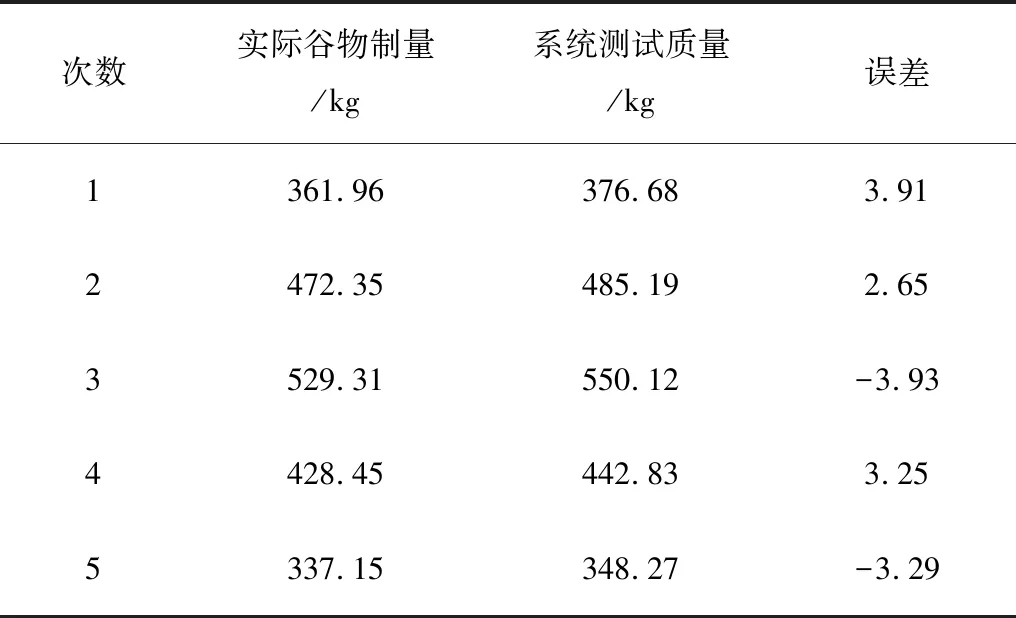
表1 田间动态试验结果Table 1 The field dynamic test results
从表1可以看出:联合收割机谷物产量计量系统误差范围为3.93%~3.91%,控制在4%以内,误差波动较小,准确率较高,能够达到设计要求,符合联合收割机的实际测产要求。
5 结论
1)针对联合收割机测产需求,以作物测产系统为研究对象,利用压力测产传感器,基于S5PV210嵌入式处理器,设计了一套联合收割机谷物产量计量系统,实现了谷物产量的实时计量。
2)田间动态试验结果表明:联合收割机谷物产量计量系统误差范围为3.93%~3.91%,控制在4%以内,误差波动较小,准确率较高,能够达到设计要求,符合联合收割机的实际测产要求。