农业智能巡检机器人轨迹跟踪控制
2019-05-24孙新安
孙新安
(河南工学院,河南 新乡 453002)
0 引言
农场的环境数据对农作物的生长至关重要,植物生长所需要的温度、湿度、光照强度及农作物的生长状况等数据都需要实时监测[1]。传统农场环境数据的获取需要人力监测,效率低下,不仅需要耗费大量的人力成本,监测结果实时性差,不符合现代农业的发展[2-4]。因此,研究现代化农业智能巡检机器人技术,对整个农业发展具有重大的现实意义[1,2,5-8]。
文献[9]提出了一种农业智能巡检小车,可以远程查看巡检中采集到的各项数据,对小车的轨迹跟踪采用跟踪传统的铺设好的黑色路径,对小车自带的红外传感器要求极高,稳定性较差。文献[10]采用了一种固定的农业巡检系统,稳定性较好,显著提高了农业的综合经济效益,但需要在每一块果园或农田都安装传感器,大大增加了成本。上海大学的赵晨宇等人提出了一种基于模糊控制算法的农业小车轨迹跟踪问题,并进行了仿真试验[11],发现该算法运算量小,运算速度快,大大提高了小车的跟踪性能。由于模糊控制算法需要大量的人为经验去调整算法的性能,不适合大规模推广应用。为此,设计了一种基于自适应鲁棒滑模变结构控制算法的智能巡检机器人。该机器人采用履带式金属底盘,GPS定位信号和GPRS无线网络传输功能集成在一个模块,由国内物联网有人公司设计USR-GM3P模块;轨迹跟踪算法部分CPU采用TI公司的浮点数字信号处理器TMS320F28335进行处理,通过自适应鲁棒滑模变结构控制算法实现对设定轨迹的跟踪。
1 智能巡检机器人系统总体设计
1.1 系统结构设计
智能巡检机器人系统包括车体部分、云服务器部分和监控客户端3个部分。巡检机器人将检测到的温湿度信息、光照强度等信息及定位信息通过UDP方式上传到云服务器,服务器采用淘宝公司的阿里云服务平台,客户端通过TCP/IP协议和云服务器进行交互,不仅可以实时查看当前农作物生产状况,还可以对历史农作物数据进行分析。 智能巡检机器人总体系统框图如图1所示。
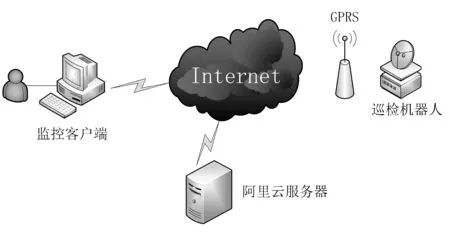
图1 智能巡检机器人总体系统框图Fig.1 The chart of intelligent inspection robot system
1.2 巡检机器人硬件结构图
巡检机器人机械结构采用4个轮子的履带式底盘,保证了在各种环境下的顺利通行,整体车架采用钢构结构,整车通过24V锂电池供电,如图2所示。
电子部分主要由传感器采集模块、直流电机驱动模块、GPS+GPRS模块及算法处理模块几部分组成。其中,传感器采集模块包含温度传感器、湿度传感器、光照强度传感器、超声波传感器等部分组成,如图3所示。

图2 智能巡检机器Fig.2 The photograph of intelligent inspection robot
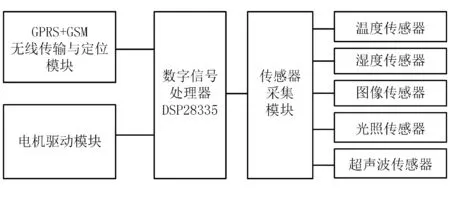
图3 巡检机器人结构图Fig.3 The structure chart of intelligent inspection robot
2 巡检机器人轨迹跟踪控制算法
巡检机器人轨迹跟踪控制算法采用自适应鲁棒滑模变结构控制算法,保证了整车控制的鲁棒性和稳定性。
2.1 巡检机器人数学模型
巡检小车采用四轮式履带结构,其中后轮为主要驱动轮,前轮为从动轮,驱动轮由2个电机驱动,因电机转速不同,产生“差动”,从而实现转向功能。通过两个驱动轮的中点M为坐标点,表示机器人在坐标系的位置;θ为航向角,表示机器人前进方向和x坐标轴的夹角,表示机器人的运动方向,如图4所示。其动力学数学模型为
(1)
其中,[x,y]为机器人的位置;v为机器人的线速度;ω为机器人的角速度,通过设计控制率[v,ω]来实现机器人的轨迹跟踪。
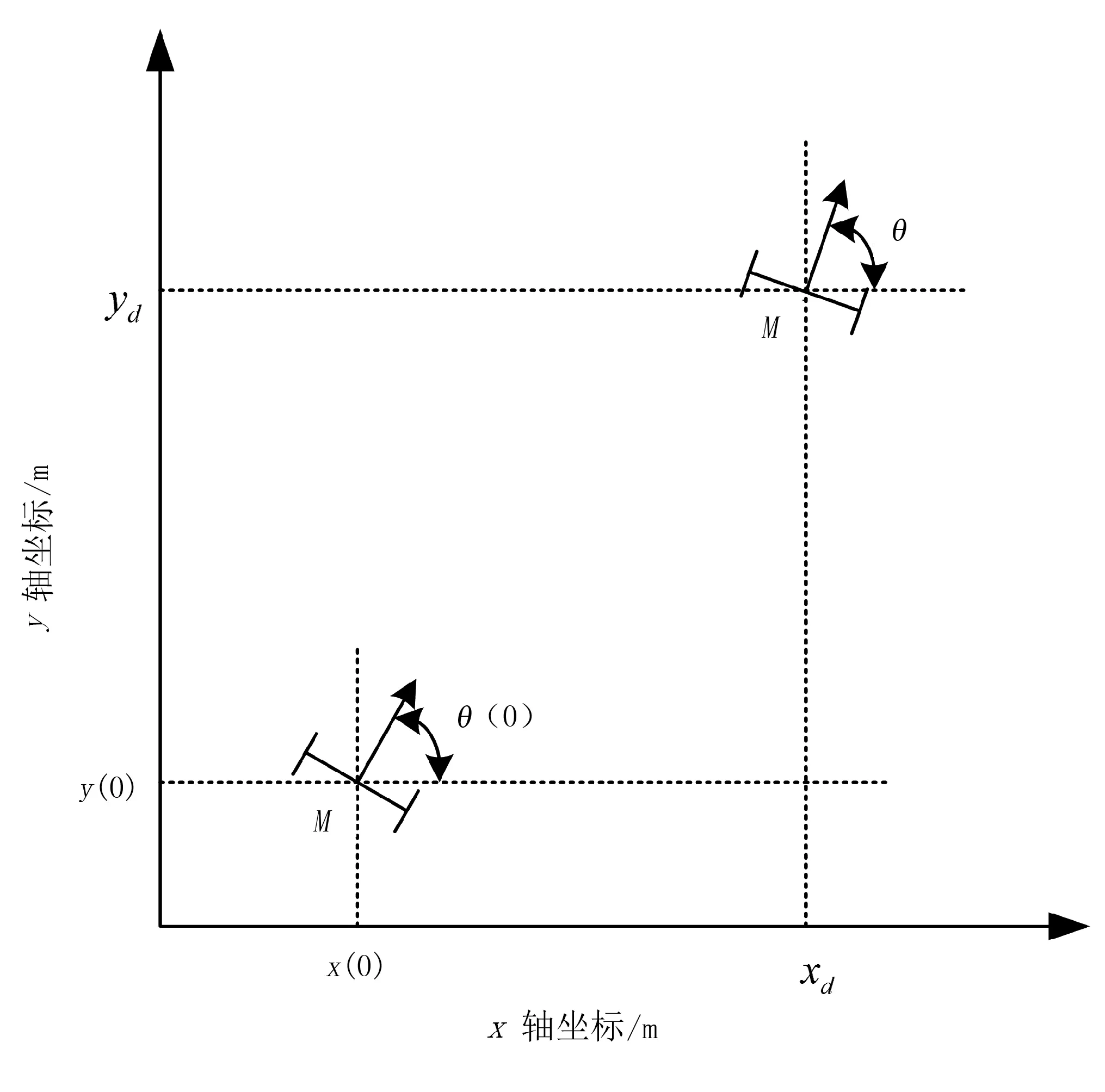
图4 巡检机器人动力学数学模型Fig.4 The dynamic mathematical model of intelligent inspection robot
2.2 自适应鲁棒滑模变结构轨迹跟踪算法
巡检机器人轨迹跟踪算法采用自适应鲁棒滑模变结构控制算法,首先设计位置控制率,实现坐标跟踪。假设理想轨迹为[xd,yd],实时位置为[x,y],则位置误差为[xe,ye]=[x-xd,x-yd]。将其代入式(1)可得
(2)
2.2.1 位置控制率的设计

构造李雅普诺夫函数,即
(3)
求导为
(4)

构造李雅普诺夫函数,即
(5)
求导为
(6)

由上述方程可知实际位置控制率为
(7)
其中,θ为实际控制角度。系统在运行过程中和理想控制角度θd之间存在误差,因此需要设计姿态控制率,使实际控制角度和理想控制角度的误差为0。
2.2.2 姿态控制率的设计
假设理想角度和实际控制角度之间的误差为θe=θ-θd,取滑模函数s3=θe,对其求导,可得
(8)
设计滑模姿态控制率为
ω=θd′-k3s3-η3(t)sgns3
(9)
其中,η3(t)=max(|E(t)|)+η为自适应鲁棒项,η>0,k3>0,E(t)=0.5|s3|。
构造李雅普诺夫函数,即
(10)
求导可得
(11)
根据柯西-施瓦茨不等式,可以得到
(12)
3 轨迹跟踪控制算法仿真
在MatLab环境下对巡检机器人进行建模,将自适应鲁棒滑模变结构控制算法用于巡检机器人的轨迹跟踪控制,取理想轨迹方程为xd=t,yd=sin(0.5x)+0.5x+1。η=0.1,k1=k2=0.3,k3=3,位置初始值为坐标原点。仿真结果如图5~图7所示。其中,实线为理想轨迹,虚线为实际运行轨迹。一开始,小车的理想轨迹和实际运行轨迹存在一定的误差;在10s以后,实际运行轨迹和理想轨迹基本重合,误差接近0,很好地实现了巡检机器人的轨迹跟踪控制。图7分别为实际x轴坐标、实际y轴坐标、实际角度和理想x轴坐标、理想y轴坐标、理想角度之间的误差波形图。由仿真结果可以看出:基于自适应鲁棒滑模变结构控制算法的巡检机器人系统可以准确地跟踪理想轨迹,具有较好的控制效果。
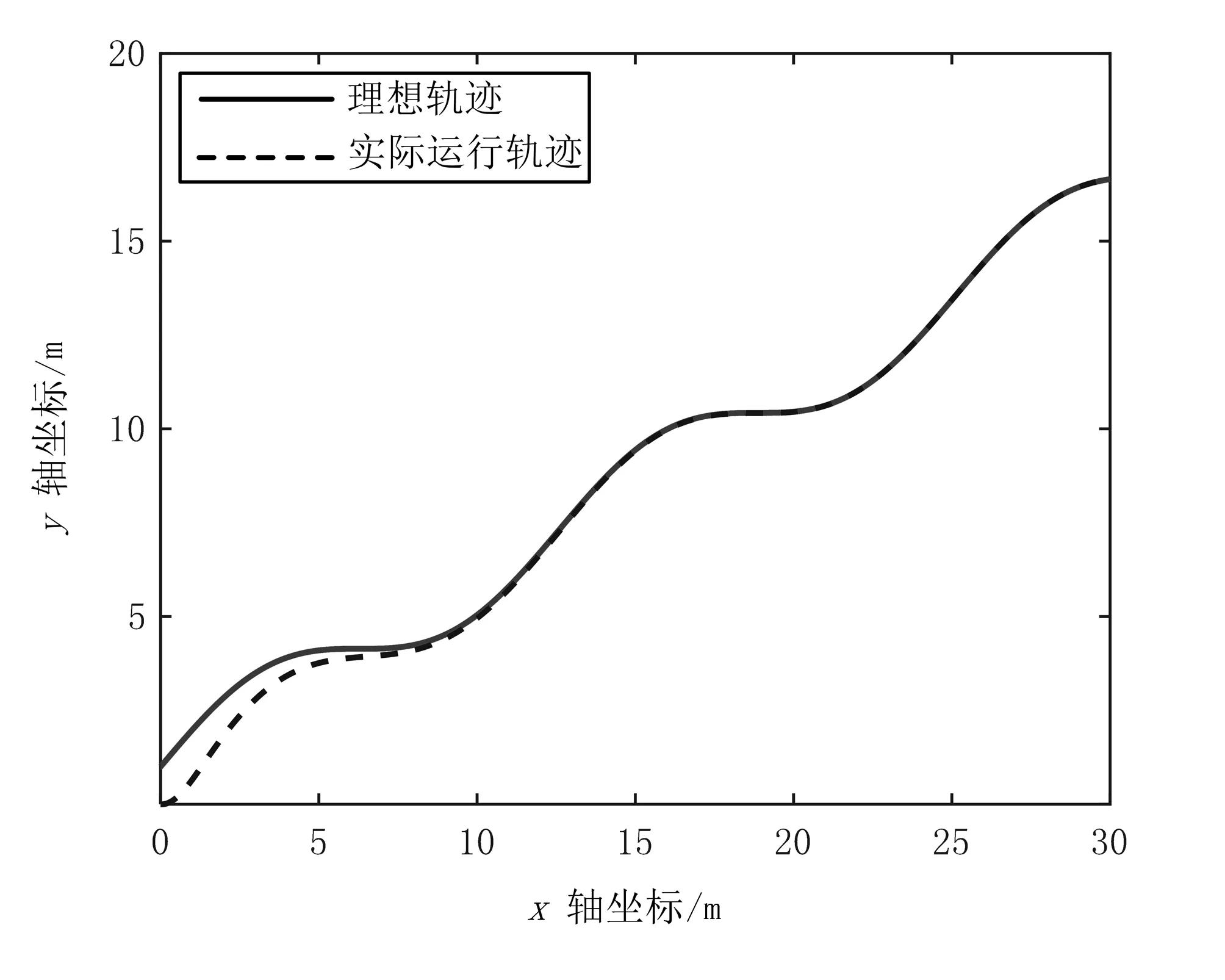
图5 轨迹跟踪仿真结果Fig.5 The simulation result of trajectory tracking
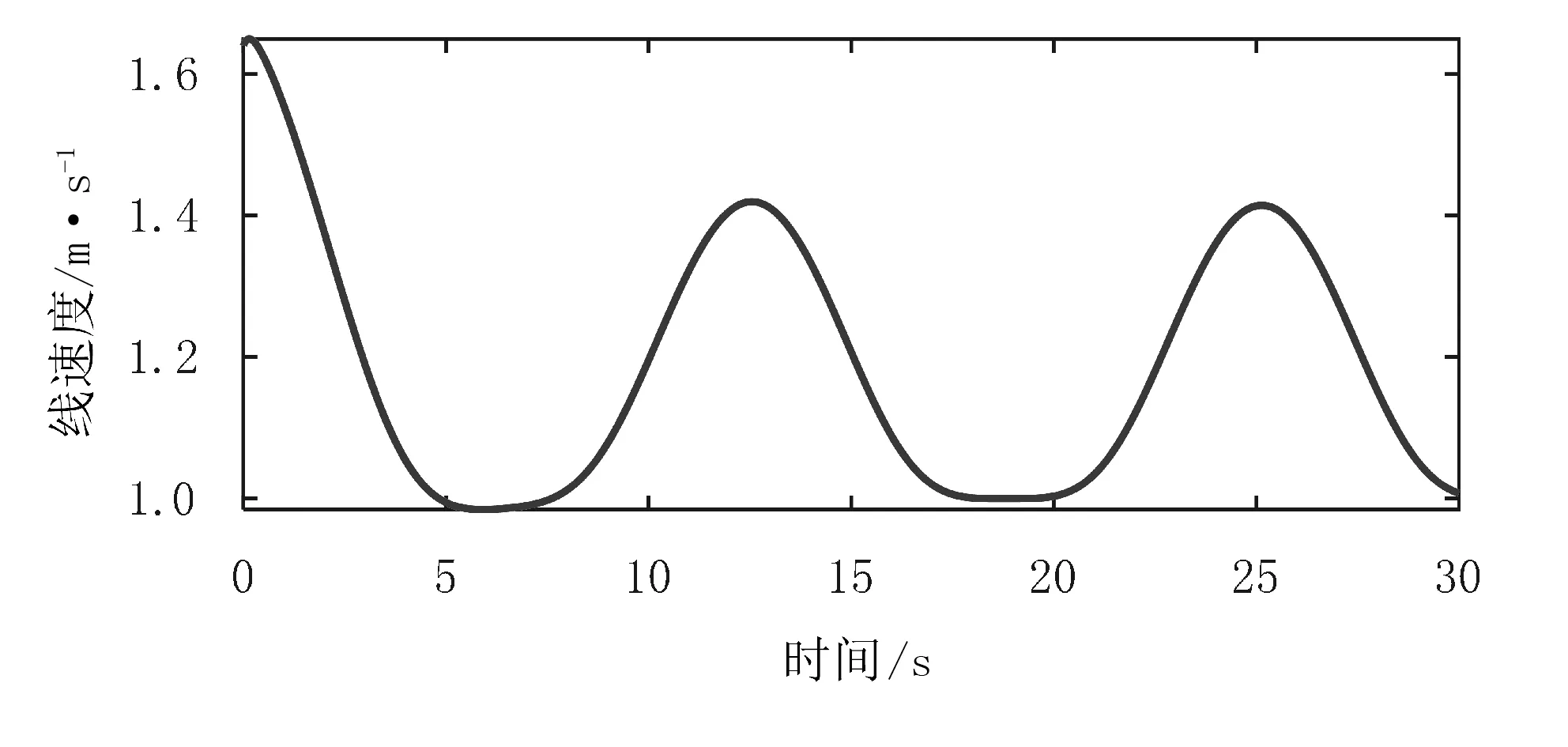
图6 控制量(线速度)仿真波形图Fig.6 The waveform diagram of linear velocity
4 智能巡检机器人试验结果分析
将基于自适应鲁棒滑模变结构控制算法的巡检机器人系统用于实际农业生产应用,测试巡检机器人系统的稳定性,测试环境为室外实际农田,如图8所示。
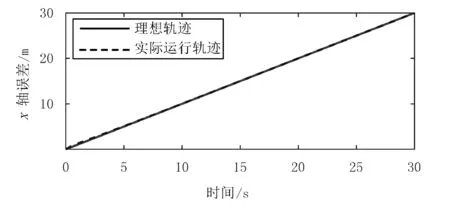
(a) x轴误差
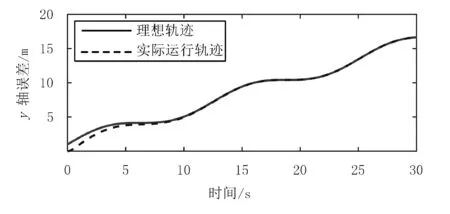
(b) y轴误差
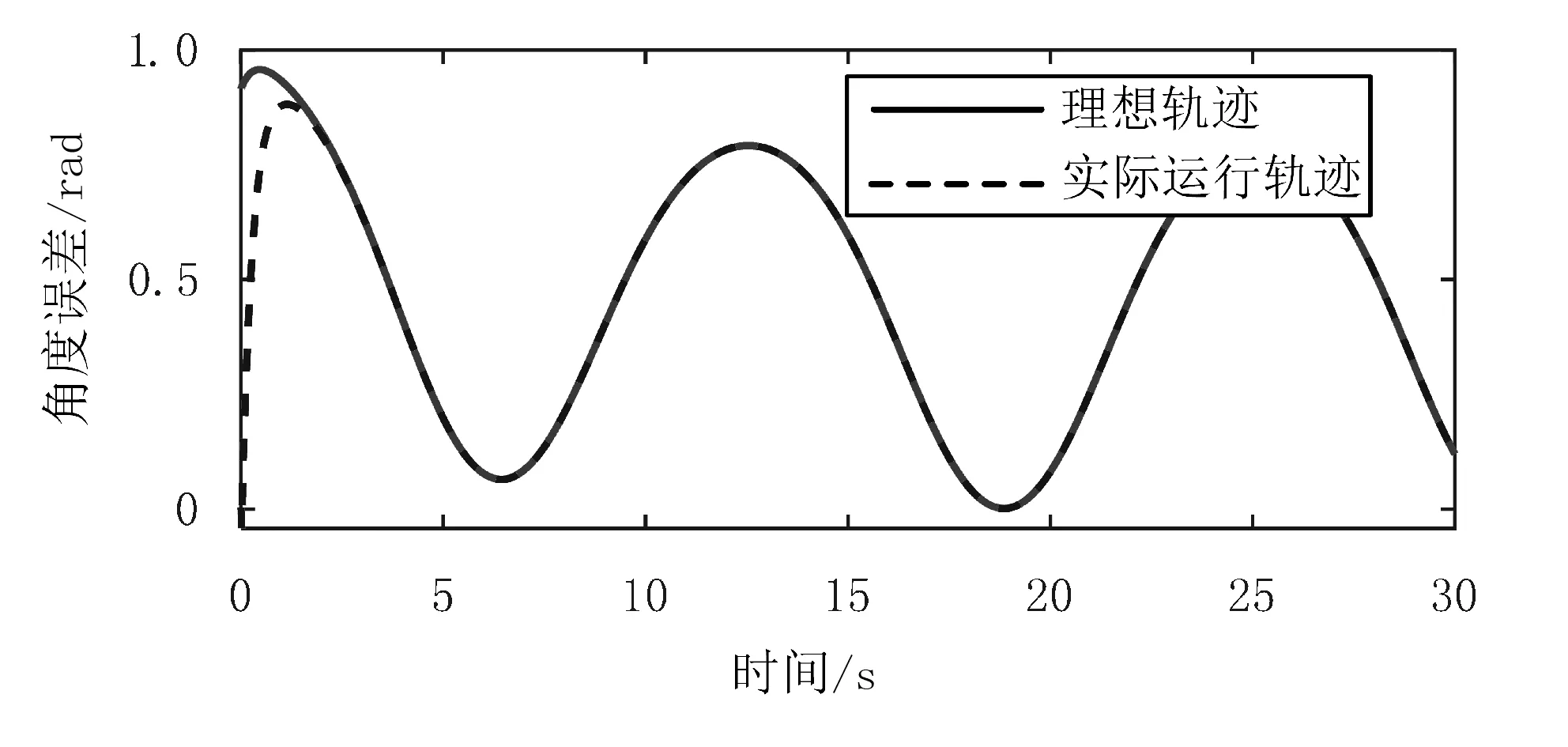
(c) 角度误差图7 轨迹跟踪仿真误差Fig.7 The error of trajectory tracking

图8 巡检机器人系统测试环境Fig.8 The test environment of inspection robot system
为了验证算法的可靠性,将巡检机器人人为地拿到规定轨迹之外约20m的地方,巡检机器人通过获取实时的GPS信号,采用自适应鲁棒滑模变结构控制算法可以迅速地将小车拉回到预先设置好设定的轨迹之中,继续按照预定轨迹运行。试验表明:基于自适应鲁棒滑模变结构控制算法的巡检机器人系统具有较好的循迹能力。
巡检机器人在获取到实时GPS定位信息之后,开始按照规定的路径运行,路径信息可以在监控客户端中设定,通过阿里公司的高德地图接口,可以实时检测巡检机器人位置信息。
图9为巡检机器人监控客户端所获取的定位信息。将巡检机器人采集到的温度数据、湿度数据和光照强度数据和实际现场用仪器设备测试的数据进行对比,结果如表1所示。由表1可以看出:通过智能巡检机器人系统获取的数据和现场人为监测的数据误差较小,可以有效代替人工,提高了劳动生产力。
5 结论
1)设计了智能巡检机器人系统的机械结构和控制系统,以数字信号处理器TMS320F28335作为主控芯片,通过有人公司的USR-GM3P模块进行GPS定位和GPRS信号传输。
2)在轨迹跟踪算法方面,设计了自适应鲁棒滑模变结构轨迹跟踪算法,在MatLab环境下对巡检机器人进行建模,通过仿真实验验证了算法的有效性。
3)通过实际田间作业试验,证明了基于自适应鲁棒滑模变结构控制算法巡检机器人系统运行的可靠性,可大大提高劳动生产力。

图9 巡检机器人监控客户端定位信息Fig.9 The location information of inspection robot表1 巡检机器人数据测试实验结果Table 1 The experimental results of inspection robot