高效自适应喷雾植保无人机设计与研究
2019-05-24张红欣
朱 超,张红欣
(昌吉学院 物理系,新疆 昌吉 831100)
0 引言
现代化作物植保具有精量化、精细化、高效及药物流失少的特点[1]。常规的植保作业,采用操作手目测的方式完成无人机施药任务,因操作手视力范围有限,不能实时精确地根据植株的高度和密度进行动态的飞行施药动作调整[2]。在对植株进行施药过程中根据植株生长高度行精量化施药,可有效提高药物沉积率,降低雾滴飘移;对植株生长密度进行精准化施药可减少药物流失同时降低药物对水体和土壤的伤害[3-4]。采用超声波测距技术完成无人机可实现植株的竖直距离及植株密度的采集,实时完成作业环境的动态感知,进行对无人机各项参数(喷雾高度、喷雾时间)自适应调节,实现对作业环境精准精量喷雾。
1 精准精量喷雾控制系统
1.1 植保无人机硬件框架
丰富的硬件配置将采集的实时作业环境数据进行系统化处理可完成飞行姿态(飞行速度、飞行高度)与喷嘴开度高效的耦合,并根据自适应控制系统下发精准的控制指令是无人机完成一次高效施药作业的关键。无人机采用意法半导体Cortex-M4内核的STM32F407处理器作为集中控制器的MCU,不仅具有高性能的处理能力及较短的指令处理周期,同时增加了丰富的外设接口,且采用更先进的电池管理模式,使处理器具有较低的工作功耗。
对微控制器的外围接口进行了二次开发可实现对无人机的自身状态的采集与实时控制。同时,配备了用于姿态调节的六轴加速度传感器、高精度角度测量传感器、气压传感器、电子罗盘、GPS、电子调速器及无线通讯模块等,以及用于施药操作的供药部件、超声波测距模块、压差式液位测量系统[5]、施药喷嘴及电子调速器控制模块。高效植保无人机喷雾控制系统硬件框架如图1所示。
1.2 定高喷雾原理
超声波测距技术具有不伤害被检测物,不受粉尘、电磁波、光波的干扰,测量精度可达厘米级的特点[6]。植保无人机在施药过程中影响喷雾效率的重要因素由目标植株高度、雾滴流场的输运特性、农药雾滴的物化程度及雾滴穿透力组成。当无人机飞行高度较高时,雾滴容易受自然风、风向和温度的影响,易造成雾滴的漂移使得雾滴分布不均匀;当作业高度较低时,雾滴大部分集中在植株中下部[7],导致了喷药效率低,药物污染大等问题。
植保无人机针对不同的施药作物,飞行的高度和速度均有所改变。为实现对作物施药作业效率的最大化,在施药开始前,需根据现场的作业环境及农业专家知识对无人机距植株的竖直飞行高度及飞行速度进行参数初始化设定,同时检查各项工作模块是否正常运行。
1.3 超声波测距电路
为了实现无人机与叶面距离的实时监测,根据作物叶面朝向及喷雾实际操作的具体要求设计了超声波测距结构。该结构安装在喷头的正下方,主要由超生波发射电路(超声波激励电路、超声波探头)及超声波接收电路(信号采集、信号调理)组成。当飞行到作物高度较低(较高)时,植保无人机根据预先设定的竖直高度进行自适应调节(下降或上升),从而最大限度地提高喷药利用率。
超声波信号发射电路主要由超声波激励电路和超声波探头组成,如图2所示。激励电路采用SP3232作为超声波换能芯片,该芯片将特定激励电压输入到探头中得到特定频率的超声信号,工作电压为3~5.5V,同时具有低功耗带电模式。引脚的C2-、C2+用于电压反转,C1+、C1-用于对电荷泵的蓄能。

图1 植保无人机硬件框架Fig.1 Hardware framework of spray protection UAV

图2 超声波发射电路Fig.2 Ultrasonic emission circuit
超声波生成中STM32高分辨率定时器发送互补可调占空比的PWM信号至SP3232的T2IN、T1IN引脚中,通过芯片自带的电压反转功能产生+6V、-6V电压,通过T2OUT、T1OUT口驱动超声波换能器,发出特定频率的超声波。
超声波在介质中传播时经障碍物反射得到的回波信号幅值随测距距离而有所改变,为得到准确的少噪声和回波信号,需对回波信号进行放大处理。系统采用NE5532运算放大器对回波信号进行再处理,该芯片具有低噪声、多运放、高性能的特点。因回波信号随着距离的增加其幅值与测距呈指数规律衰减,本文采用时间增益补偿电路对衰减的回波进行增益补偿。超声波接收电路如图3所示。

图3 超声波接收电路Fig.3 Ultrasonic receiving circuit
1.4 精量喷雾原理
农作物生长密度受土壤酸碱性、浇水适度性等因素影响,造成农作物生长密度存在差异[8],生长密度均匀和密度在较少植株区域在施药过程中不能同一而论地进行喷雾工作;同时,喷嘴直径及流体压强对药液流速流量、喷雾颗粒大小及雾滴的沉积分布存在不同强度的影响[3-4]。高效无人机采用电动离心喷嘴,在施药过程中可实现在植株叶面真反面及径部均匀雾滴喷洒。
植保过程中当无人机飞行至植株密度较低的区域时,超声波根据渡越时间确定喷头下方是否存在植株及植株生长密度。同时,将检测数据传送至微处理器中,通过专用通讯协议调动电子调速器,从而实现对药箱中隔膜泵和用于施药的电动离心喷头进行调速控制,进而根据作物密度进行药物流量、喷幅范围和形成的雾滴半径进行调控。无人机在施药时其飞行速度与所需施药量呈一定数学关系式[9],即
其中,Q为计算流量(L/min);A为碰头喷幅(m);W为目标面积使用量(L/hm2);U为无人机飞行速度(m/s)。
图4为精量喷药控制系统控制原理图。

图4 精量喷药控制系统控制原理图Fig.4 Control principle diagram of precision spray control system
2 无人机位置控制原理
本文设计的植保无人机为“十”字交叉型结构模型的四旋翼飞行器,结构如图5所示。在无人机十字结构的末端分别为4个直流电机。
通过控制各个电机电流大小来控制转速,电机转速不同所产生的升力、阻力不同,这样通过控制电机转速就可以改变飞行器的飞行姿态。较为典型的姿态调整原理如图6所示。
当4个电机均保持同一额定转速时,飞行器将保持悬停动作;当同时增大(降低)4个电机的转速时,飞行器将完成上升(下降)运动;当电机2转速降低,电机4转速增大时,飞行器完成左倾(右倾)运动;当电机2、4加速,电机1、3减速时,飞行器完成顺(逆)时针旋转;通过对4个电机转速的增大和减小动作的组合,可实现飞行姿态的位置运动。关于四旋翼无人机位置具体控制步骤和分析可根据文献[10-13]进行建模的推导,本文在此不再赘述。

图5 四旋翼飞行器结构模型Fig.5 Structure model of four rotor aerocraft

图6 四旋翼飞行器姿态调整原理Fig.6 Attitude adjustment principle of four rotor aerocraft
3 高效自适应喷雾控制系统
基于ARM架构的变量施药控制系统和基于脉宽调制技术的施药流量控制方法,将超声波测得的高度与预设定的施药高度进行实时对比,对比结果表明:根据高精度模糊推理系统作用于各旋翼电机,实现了根据最优施药距离完成无人机的施药高度的动态调整;根据对作物生长密度的信息采集对施药喷头的参数进行最优配置,可实现喷雾效率最大化、药物使用精量化;整个自适应喷雾过程实现了施药流量与施药幅度同飞行高度、速度的自动匹配。高效自适应喷雾控制系统控制原理流程图如图7所示。
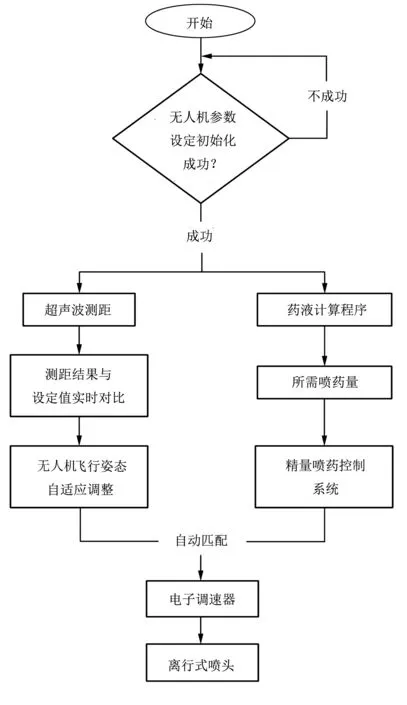
图7 高效自适应喷雾控制系统控制流程图Fig.7 Control flow chart of efficient adaptive spray control system
4 喷雾试验结果及分析
针对在实验室环境对超声波测距系统进行了试验,分别对各个竖直距离的参数进行测定,设计的超声波测距模块总误差在4%以内,达到使用标准,试验结果如表1所示。

表1 超声波测距结果Table 1 The result of ultrasonic distance measurement
试验在昌吉州园艺场5队开展针对棉花施药作业进行,环境平均相对湿度53%,平均温度27℃,风速小于1.4m/s,如图8所示。

图8 植保无人机喷雾实验图Fig.8 Spray experiment map of plant protection UAV
在该试验田选取5组密度不同的棉花条列,植保无人机可负载15L农药,通过使用高效喷雾系统的施药作业使用药量与常规进行喷药作业的施药药量进行对比,高效喷雾系统整体节药量最高达18.81%,平均节药量为16.63%,如表2所示。

表2 高效喷雾与常规喷雾药量对比Table 2 Comparison of high efficiency spray and conventional spray dosage
在试验田内选取一列棉花植株生长密度不均匀的条列,采用文献[14]中介绍的雾滴沉积量检测方法检测单位叶面的雾滴沉积量,如表3所示。在该条列中选取的20个作物编号统计的结果表明:高效喷雾控制系统在植株生长密度不均匀作业环境下,雾滴喷洒沉积量均匀,偏差可控制在较小范围内。

表3 雾滴沉积量数据统计Table 3 Statistics of droplet deposition data
5 结论
1)针对植保过程中由于目测施药造成施药不均匀,设计的基于ARM架构的高效喷雾植保无人机具有丰富的外围作业环境信息采集模块,便于后期针对喷雾过程中喷雾效率受生成气流、环境风速风向影响的深入研究。现阶段开发的高效喷雾控制系统可根据植株高度完成无人机姿态的自适应调节,同时采用脉冲宽度调制技术对喷雾量及幅度进行了自动控制,实现了根据作业环境进行飞行状态与施药量的自适应匹配。
2)通过在昌吉州园艺场5队面积为6.8hm2的试验田中的多组试验结果表明:设计研发的喷雾植保无人机飞行过程中能准确检测与植株的距离,误差可控制在4%以内;根据植株密度进行自适应可靠控制喷药流量,施药量明显降低,与常规作业相比喷药量平均降低16.63%,施药作业雾滴沉积量较为均匀;试验过程无人机系统运行稳定可靠,自适应响应快,具有较高的鲁棒性。