基于自适应模糊PID控制的农用作业机械轨迹跟踪系统研究
2019-05-23严国军贲能军顾建华
严国军,贲能军,杨 彦,顾建华,祁 淼,3
(1.盐城工业职业技术学院, 江苏 盐城 224000; 2.南京理工大学, 南京 210000;3.江苏大学, 江苏 镇江 212000)
随着科技的发展,为了使农业机械能在作业环境中完成自动除草、收获、施肥、修剪、耕耘等工作任务[1],农业作业机械自主导航循迹逐渐成为现代农业生产自动化、规模化、精确化[2]发展的核心技术之一。根据我国农机工业协会发布的数据可见,2013年、2015年中国农业机械行业累计达到的工业生产总产值分别为3 382.40亿元、3 800.00亿元,同比增长19.07%、12.35%[3]。这说明,我国的农业机械市场需求持续刚性增长,智能化农机能进一步促进我国农业的高速发展,加强我国农业机械产品的市场竞争力[4-6]。
农机的工作场景较为固定,且较少出现行人,驾驶行为主要有依照预定直线路径行驶和在农田果园弯道处完成转向2种。所以,农业作业机械自动轨迹跟踪包括航向追踪和路径追踪2部分。由于农田环境的多样性[7],算法的适应性及导航控制精度还远远不够[8-9],如传统的PID控制在受外部干扰时鲁棒性差[10-12],且没有较为完善的参数调节标准。同时,目前大多数农业作业机械转向间隙较大[13-14],直接进行转向控制很难达到较好的控制稳定性。本文基于一款农业作业拖拉机,利用车载传感器和计算机作为环境感知系统,提出一种新型的自适应模糊PID控制,实现在无人工况下预定路线的自动轨迹跟踪[15-16]。
1 横向运动控制理论
1.1 预瞄跟踪原理
在低速状态下,暂不考虑车辆的运动耦合情况[17],底层运动控制则相应分为横向控制和纵向控制2方面。由于农机车辆的整车运行速度范围为5~20 km/h,整体运行速度低且速度范围较窄。因此,车辆的纵向运动按定速跟踪实现,且不考虑空气动力学因素带来的影响。
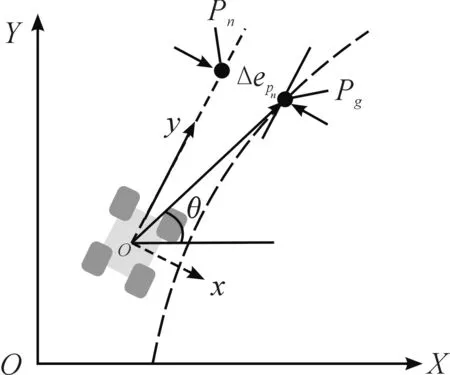
图1 预瞄跟踪控制原理
基于PID的预瞄跟踪方法属于一种简单高效的车辆控制方法[18],其基本控制思路为(如图1所示):在车辆坐标系下,把距车辆正前方一定距离的一点作为预瞄点Pn,同时把过预瞄点且垂直于车辆纵轴的直线与期望路径的交点与预瞄点的距离作为PID控制的横向预瞄偏差Δepn[19]。然后根据PID控制算法,计算出需要对方向盘施加的控制量,如式(1)所示。
(1)

在当前车辆坐标系下,预瞄点Pn坐标为(0,ypn),扫描所有离散路径点,得到其中距离预瞄点最近的点Pg,则其坐标为(xpg,ypg),ΔePn的值可通过传感器测算得到,也可在全局坐标系再通过坐标进一步推算。
转换到全局坐标系下,假设车辆当前位姿为(Xr,Yr,θr),Pn坐标为(Xpn,Ypn),Pg坐标为(Xpg,Ypg),可得
(2)
由三角变换关系可得
(3)
根据向量的叉乘运算规则,可得
(4)
1.2 自适应模糊PID控制
轨迹跟踪控制一般采用PID控制,输出量为方向盘转向角αout,但实际运行效果较差[20]。一方面,农机过大的转向间隙直接导致了农机方向盘回正不及时且不充分,因此当农机方向盘回正时,在转角控制器输出的方向盘转角的基础上,再补偿转向间隙。另一方面,农机在泥地工况下行驶,车身都会向车轮回正的方向发生一定距离的侧滑[21],因此还需在原有的方向盘转角补偿基础上再加上侧滑补偿的方向盘转角。本文结合驾驶员的预瞄特性[22],基于目标点迭代搜索的算法进行预瞄点动态搜索,通过计算农业作业机械的航向角偏差和横向偏差,采用自适应模糊控制算法进行农机的转向控制,然后输入下一级PID控制器,由实际方向盘转角作为前馈修正量进行控制,原理如图2所示。
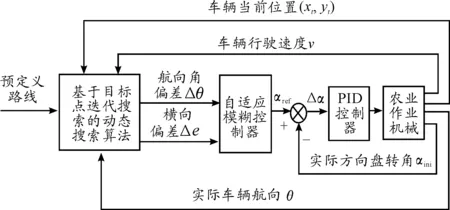
图2 农机轨迹跟踪控制原理
根据对规划路径与农机之间的相对位置关系和对驾驶员经验的模拟,制定相应的模糊控制规则,其模糊控制规则表如表1所示。其中,按照模糊逻辑理论,模糊控制2个输入变量航向角偏差与横向位置偏差和一个输出变量目标方向盘转角,共同构成一个2维模糊控制器。

表1 目标方向盘转角的模糊控制规则
同时,3个变量的离散论域分别可表示为
Δe={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
Δθ={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
αref={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
本文取航向角偏差的基本论域为[-30°,30°],量化因子KΔθ=0.2,取横向位置偏差的基本论域为[-30 cm,30 cm],量化因子KΔe=0.2,取目标转角的基本论域为[-15°,15°],比例因子Kα=2.5。采用Mamdani模糊推理方法和极大极小的模糊逻辑推理合成规则,并通过去重心法解模糊化,得到轨迹跟踪特性曲面图,如图3所示。
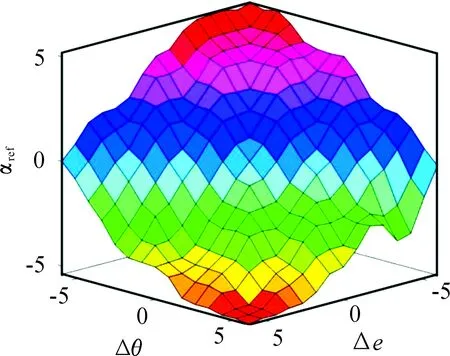
图3 轨迹跟踪特性曲面图
2 车辆动力学模型的建立
本文主要基于一款黄金海马-554Y园艺拖拉机进行试验研究,车辆基本结构如图4所示。农机与一般的轿车相比,在结构和动力上都有明显的区别,在动力学和运动学上的区别较大[23],当所考虑的自由度较少时,不能完整地表征系统的动力学特性。

图4 试验系统中的农业作业机械
为避免直接建立大量的复杂动力学方程,讨论各系统动力学参数之间的耦合关系,本文采用车辆动力学仿真软件Carsim中的基础拖拉机模型,通过设置相关试验参数,建立27自由度的农机模型。建立模型所需的主要车辆平台技术参数如表2所示。
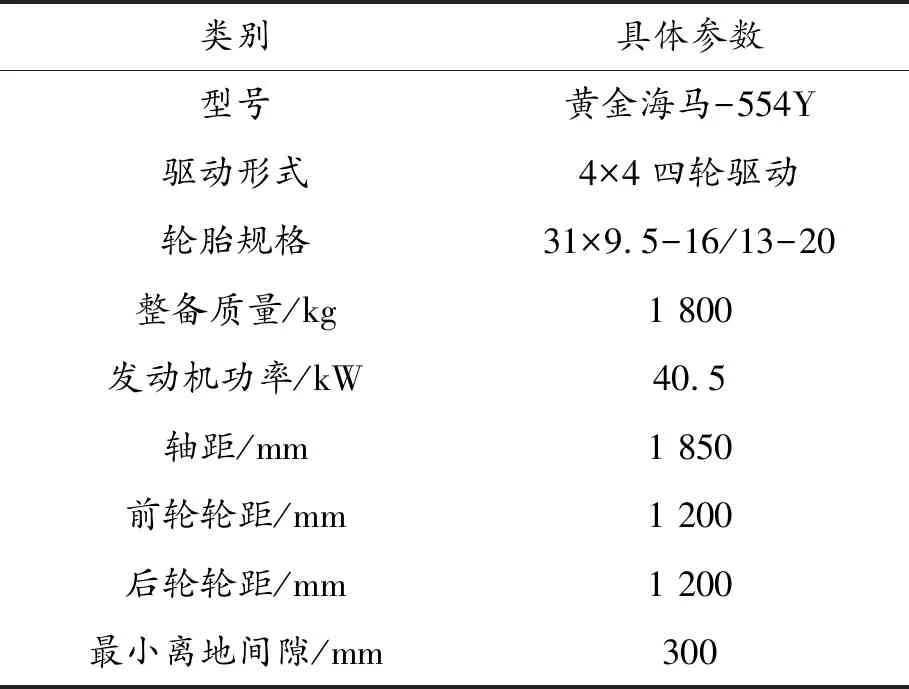
表2 试验车辆平台技术参数
由于农业作业机械工作环境主要面向路面附着系数较低的不平路面,因此在建立仿真环境时,还需建立相应的道路谱文件。不失一般性,本研究将道路附着系数设置为0.75,根据两侧车轮接触的道路平面相对于基准面的高度差编写适用于农业作业地区不平路面的道路谱文件,如图5所示。
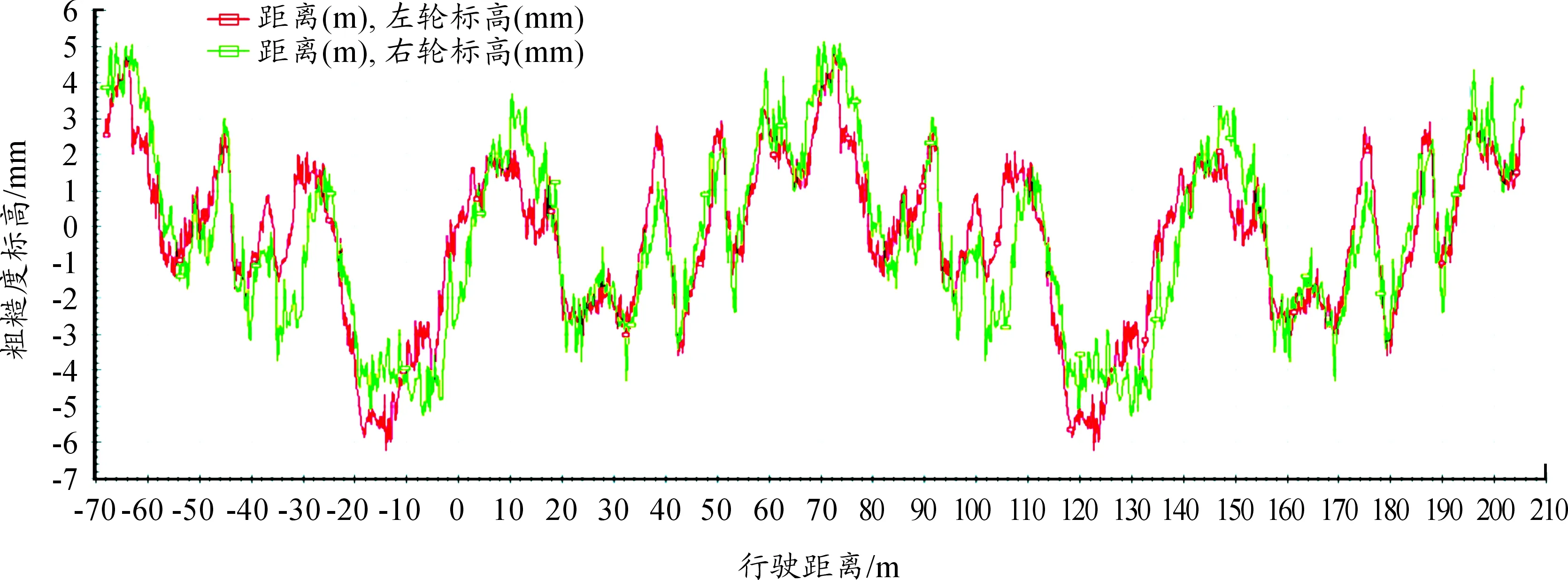
图5 适用于农业作业区域不平路面的道路谱
3 控制仿真与分析验证
为验证轨迹跟踪控制的效果,采用Carsim与Matlab/Simulink进行联合仿真,对比纯PID控制和自适应模糊控制补偿方向盘转角控制。本文对PID控制器参数设置为Kp=6,Ki=2,Kp=2,仿真初始条件是农机行驶速度12 km/h,由于农业作业机械行驶路线主要由直线轨迹和U形弯组成,因此本文选取典型的双移线试验对控制效果进行验证。2种控制方法下横向位置偏差的对比如图6所示。
图6中,紫色曲线表示期望行驶轨迹,绿色曲线表示自适应模糊PID控制下的车辆仿真轨迹,红色曲线表示传统PID控制仿真下的车辆仿真轨迹。由此可得,车辆在传统PID控制和自适应模糊PID控制2种方法下都能对所规划的轨迹进行跟踪,相比之下,本文所采用的自适应模糊PID控制的轨迹跟踪效果更好,最大偏差出现在第2个拐弯处,但偏差仅为0.1 m,且很快就收敛到0值附近,从而保证车辆轨迹跟踪的效果。
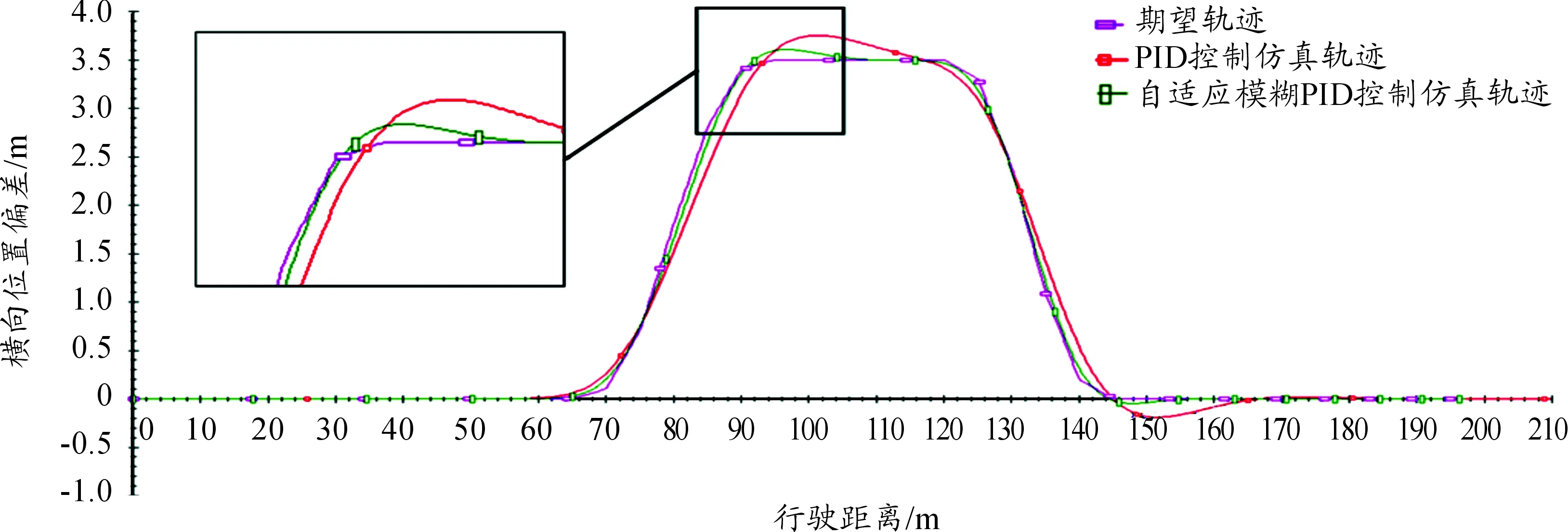
图6 自适应模糊PID控制仿真结果
对比2种控制方法,自适应模糊PID由于直接采用经验构成的模糊规则,相较传统PID而言,在轨迹跟踪的响应时间上更快,农机方向盘在达到期望航向角后能较快恢复稳定,同时航向角偏差的超调量减小,因此方向盘转角补偿的效果显著。由图7所示仿真结果可知,农机在行驶直线和拐弯过程中均表现平稳,符合预期的要求。
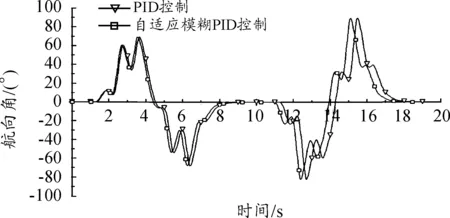
图7 航向角变化曲线
4 结束语
本文对智能农业作业机械的轨迹跟踪控制进行了研究,在传统PID控制的基础上,为适应智能农机较差的车况和工作环境,采用自适应模糊PID控制对智能农机的方向盘转角间隙进行了补偿。通过Carsim与Simulink的联合仿真,验证了自适应模糊PID控制算法的有效性和鲁棒性,为提高智能农业作业机械的实车试验轨迹跟踪精度提供了理论基础。
本文所采用的模糊控制在直线跟踪和小曲率的曲线跟踪中效果较好,但在大曲率的转弯作业中,由于模糊控制器的设计未考虑到更精确的车辆模型,仍较难做到精确控制,有待后续工作进行补充。
