基于任务驱动法的电气自动化技术专业教学——以“伺服电机”课程为例
2019-05-22宋啸天
沙 鸥,宋啸天
(1. 镇江高等专科学校 丹阳师范学院,江苏 丹阳 212300; 2. 镇江市审计局 社会保障审计处,江苏 镇江 212003)
“伺服电机”是电气自动化技术专业的重要专业课程。通过学习,学生能够掌握感应电机、永磁同步电机等类型电机伺服控制系统的工作原理和控制策略,为今后从事电机装配工、调试工等电气自动化技术专业工作奠定理论基础。但“伺服电机”综合了电机学、电磁学、自动控制原理(Principle of Automatic Control,PAC)、电力电子技术(Power Electronical Technology,PET)、数字电子技术、模拟电子技术等专业基础知识,学习难度较大[1]。专科学生理论基础较薄弱,缺少独立分析能力[2],若仅仅靠教师“一对多”模式授课,则无法针对每个学生的实际学习状况有效开展课程教学,学生遇到难点、疑点时,就会难以理解,从而产生厌学情绪。为打破这种局面,有必要变革授课模式,探索和创新教学内容、教学方法等[3]。
1 任务驱动教学法
任务驱动教学法,是教师依据教学进度和学生已掌握知识的程度,针对教学内容整体设计涵盖目标知识点的综合性任务,学生分组完成任务,在真实的问题情境下运用旧知识探索新知识,巩固和加深所学知识的过程[4]。
如将任务驱动法运用于PLC课程教学,根据真实的生产过程确定具体任务,详细讲解主电路、控制回路输入端子、梯形图等关键知识点,带领学生围绕任务做可行性分析,引导学生优化程序,通过自主探究完成任务,完整地学习PLC控制电机正反停转的全过程[5]。采用任务驱动教学法,保持了知识点的系统性和整体性,学生不仅了解PLC编程方法、主电路工作原理等关键知识点,而且理解各知识点间的关系,启发独立思考,培养自学能力。任务是从实际生产过程中提炼出来的,具有很强的实践性。如修改梯形图中的1个元件,主电路的工作方式就会发生变化,学生通过应对这种变化可以提高实践操作能力,就业后能够迅速适应生产企业的需要,提高就业竞争力。
“伺服电机”课程教学中,设计一系列电机组装、调试等任务,让学生在完成任务中发现各类功率开关器件和传感器的特性,学会根据不同的电机特性、应用场合选择不同的控制策略,进而深入理解各类电机伺服控制系统的结构和工作原理,牢固掌握伺服电机知识。
2 高职课程运用任务驱动教学法的必要性
2.1 贴合普专学情特点
相对于本科学生,专科学生专业理论功底较薄弱,很难消化吸收抽象的理论和概念,“满堂灌式”课堂教学中,难以跟随教师的授课节奏快速学习理论知识。长此以往,学生只能靠死记硬背应付考试,不能真正理解“伺服电机”理论知识,无法融会贯通,更不能举一反三,培养创新思维,容易出现怕学、厌学情绪。任务驱动教学法以任务为导向,将目标知识融入具体任务,学生在完成任务中通过实际操作全面了解理论知识,激发兴趣,培养创新能力和动手能力,掌握电机结构和工作原理知识。
2.2 满足就业市场需求
普专学生毕业后多从事操作技能类岗位工作,如电机装配工、调试工、维修工等。这类岗位对实践能力和动手能力要求较高。因此,专科学校在教学过程中应以就业市场需求为切入点,注重学生实践操作技能的培养。采用任务驱动教学法,以完成实际操作任务为主线,学生在实际操作中学习理论知识、培养动手能力,可以满足就业市场的要求。
2.3 培养学生自学能力
教师课前布置教学任务,学生自学书本知识的同时,通过网络、图书馆等学习解决问题的方法,进而整合消化所学知识,完成相关任务,真正实现自主学习[6]。这个过程有助于培养学生自学能力,提升综合素质。
3 任务驱动教学法在“伺服电机”中的应用
以2018—2019学年“伺服电机”课程为例,采用任务驱动教学法,共计48课时,授课对象为2017级电气自动化技术专业学生。该专业学生动手实践能力较强,但理论推导能力较弱。根据任务驱动教学法的设计要求,分别设计了4项主线任务,如表1所示。

表1 “伺服电机”任务列表
3.1 课前任务预设与预习
任务驱动教学法要求教师在课前做好任务预设,打破书本章节的信息壁垒,选择与实际生产生活相适应的任务。该任务能够串联各章节的相关知识点,让学生在学习各组成单元原理的同时对伺服系统有总体性、宏观性的把握。以第1项任务物料计量螺杆装置设计为例,物料计量螺杆实际是由步进电机带动的,电机转速直接关系物料计量的准确度,因此可以设计以步进电机为核心的伺服系统。完整的伺服电机系统包括交流伺服电机、传感器、控制器、功率变换电路等,如图1所示[7]3-4。
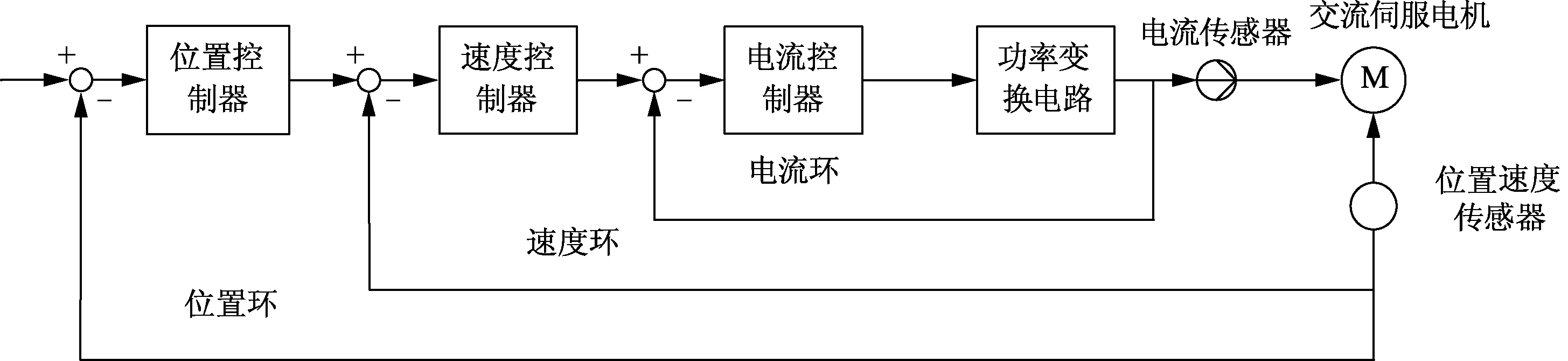
图1 交流伺服系统框图
由于电机带动螺杆旋转的圈数直接影响下料量,即影响计量精度,因此,学生在设计伺服系统时必须提高系统的鲁棒性、改善系统的响应特性,主要考虑3个要素:功率开关器件、控制策略、传感器,即选用何种功率开关器件组成系统的功率变换电路,采取何种控制策略,选用何种传感器。学生利用图书馆、互联网等进行课前预习,初步了解各类功率开关器件特性、常用控制策略和传感器。
3.2 推进任务实施
授课的第1环节为知识系统构建,共2课时。首先,教师阐述GTR,MOSFET,IGBT开关器件的动静态特性,比较三者的容量和开关频率,引导学生选用容量大、开关频率高的IGBT作为功率开关器件。其次,教师介绍各类速度位置传感器和电流传感器的工作特性,学生根据实际应用场景,开展小组讨论,选择响应速度快、温度漂移低的混合式光电编码器作为速度位置传感器,采用体积小、抗干扰能强的霍尔电流传感器检测电流。
授课的第2环节为模拟仿真验证,共4课时。教师讲解2自由度PID控制策略,并画出系统的控制框图,学生根据框图求出闭环传递函数,利用矩阵实验室(Matrix Laboratory,MATBLE)进行转矩、转速、电流波形仿真,通过调节2自由度参数α,β和TI,TD,KP参数获得较理想的仿真波形。通过小组讨论和经验交流,引导学生认识到2自由度参数α,β影响目标跟踪特性,比例积分微分参数影响系统抗干扰特性。
授课的第3环节为实验动手操作,共4课时。教师带领学生设计以步进电机为核心的伺服控制系统,将经过仿真验证的控制参数输入控制器,通过实验验证系统的响应速度、抗干扰特性和鲁棒性。完成目标任务过程中,始终坚持以学生为主体、教师为主导的原则,给学生充足的交流讨论时间,充分发挥学生的主观能动性,提高其自主学习能力和动手实践能力。
3.3 做好任务总结评价
任务完成后及时总结评价,共2课时。学生阐述伺服系统的基本组成,如功率变换单元和测量单元选用了何种元器件,采用何种控制方法,系统设计过程是怎样的,是否还有更好的设计思路。
比如有学生提出疑问:“普通PID控制策略就可以实现步进电机的稳定控制,为何采用运算复杂的2自由度PID控制策略?”教师可以引导学生讨论评价并修改控制参数,设置α,β为0,观察系统的输出转矩波形,让学生认识到引入2自由度控制可以增强系统的目标跟踪特性,提高物料计量的精确性。
此外,教师还可以对任务场景的具体参数做一些合理范围内的变动,以提高学生在操作过程中的应急应变能力。如预设物料计量螺杆装置的工作环境高温高湿、粉尘较大,学生在选用传感器时应尽可能选用磁性传感器,提高测量系统的精确性。
任务的总结评价是双向的。当1项任务完成后,教师应及时总结本次任务驱动教学中的不足之处并进行修正。
任务驱动教学法是一种开放式的教学方法,教师应该及时反思教学过程中出现的问题,根据学生的特点进行针对性指导,确保课程进度按计划进行,激发学生的兴趣等。
4 结束语
以电气自动化技术专业“伺服电机”课程为例,采用任务驱动教学法,以实践任务为主线,将教学内容巧妙地穿插在任务中,有利于学生将理论知识转化为实践技能,提高创新能力和动手能力,毕业后快速成为企业生产一线的合格员工。