基于三维体验平台的船舶设备位置驱动与布置
2019-05-20邹梦瑶管伟元
邹梦瑶,管伟元,王 充,吴 立
(中国船舶及海洋工程设计研究院,上海 200011)
0 引 言
随着数字化设计技术的快速发展,船舶制造业已在数字化设计方面取得较大进展,并正在进一步朝智能化方向转型。目前国内主流的船舶三维设计软件主要有CADDS5、TRIBON、NAPA、FORAN、SPD和三维体验(3D Experience)平台等,其中3D Experience平台是法国达索系统开发的新一代集CAD、CAE和CAM于一体的PLM软件平台[1]。该平台旨在为企业提供一体化、智能化的工业解决方案,可很好地满足制造业在数字化转型升级方面的需求,为制造业带来全新的设计和生产体验,目前已成功应用于航空航天、汽车和船舶等领域[2-3]。
在总布置设计中,设备的布置流程一般从库中调用,通过操作罗盘进行位置移动和方向调整[4]。该方法不仅缺乏与二维原理图之间的关联,而且设备移动定位的效率和准确性不足。二维驱动三维(Logical to Physical,L2P)[5]是3D Experience平台中连接二维原理图设计和三维设计的重要方法,采用该方法不仅可实现对原理图中电缆和管线的驱动,而且可实现对分电箱和油泵等船舶设备的位置驱动。但是,在不配置驱动规则的情况下,只能先将设备驱动到船舶坐标系的原点,再运用罗盘对其进行移动。针对以上问题,本文重点研究L2P的驱动机制,实现二维与三维的关联,并且通过EKL编程实现对设备的高效位置驱动和准确布置,同时为后续原理图中涉及空间关联的BI检查创造条件。设备位置驱动和布置的具体流程见图1。
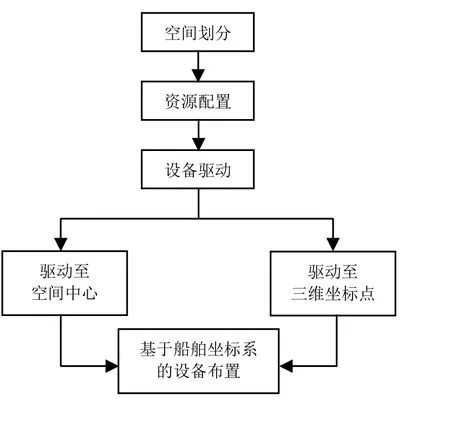
图1 设备位置驱动和布置的具体流程
1 空间划分
空间划分主要运用空间分配(Space Allocation, SAO)模块和创成式曲面设计(Generative Shape Design,GSD)模块。首先,运用SAO模块定义切割元素,对主船体进行区域划分,切割元素主要分为DeckCE、FireZoneCE、WaterTightCE、LongCE和CrossCE等5类,可按实际需要删除或添加切割元素的种类。然后,选取划分好的某个区域,在某个支持面上绘制草图,运用草图中的线元素代表舱壁的位置,进而划分出具体的舱室空间。对某平台供应船(Platform Supply Vessel, PSV)双层底区域进行详细的舱室划分所绘草图见图2。

图2 某PSV双层底区域详细舱室划分草图
需注意,在定义切割元素时,对于不规则甲板面,需先运用GSD模块生成甲板曲面,再将其定义为切割元素。此外,对于形状较为复杂的非规则舱室,可先运用GSD模块,通过曲面的拉伸、切割和缝合形成封闭体,再将该封闭体指定为某个具体的舱室。某PSV的空间划分结果见图3。
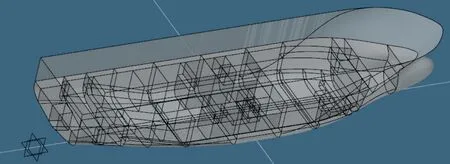
图3 某PSV的空间划分结果
2 资源配置
空间划分好之后,为实现设备向指定空间的驱动,需将划分好的空间配置在资源库中,以便创建二维原理图中的设备符号与指定空间的关联。此外,需在资源库中配置设备的驱动规则。为实现设备的驱动,需配置Diagram Resources和Logical System Routing Resources 2种资源集,具体需配置的资源项见表1。

表1 资源配置
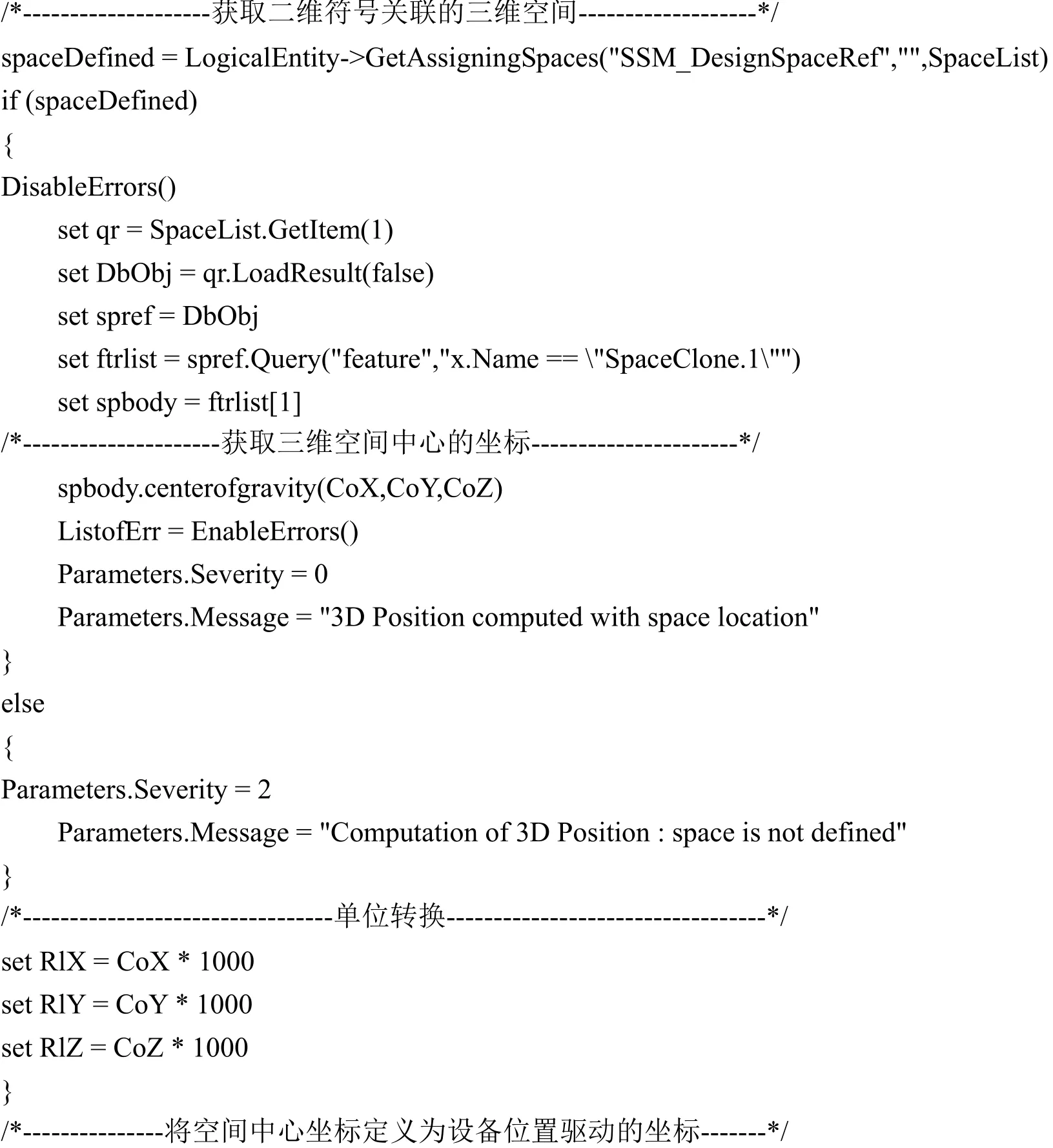
表1中的Zone Names资源项中需声明空间类型和读取方向,其中:空间类型主要有Deck、Room、Watertight zones和Fire zones等;读取方向与空间类型相关联,主要有Above、Below、Left、Right和Inside等。例如,为实现设备向指定舱室的驱动,空间类型选择为Room,空间读取方向选择为Inside,将存储舱室名称的Sheet表导入。表1中的Compute 3D position资源项中需配置设备的驱动规则,驱动规则用EKL语言编写,该语言是3D Experience平台中的一种面向对象的简便、直译、自动化的语言,支持用户定制业务流程,帮助用户定义、重用和分享知识。驱动规则部分核心代码如下:

3 设备位置驱动
为实现设备的位置驱动,除了配置相应的资源以外,还需具备2个条件,即:二维原理图中设备符号与空间相关联;设备符号Reference属性中的Predefined Part Number与所要驱动三维设备的Title相一致,否则无法实现驱动。创建空间关联在二维原理图的视图窗口完成。首先,运用Create Zone命令选择区域的类型和名称,在原理图中绘制一个封闭图形代表某个指定的舱室空间,其次,运用Create Space Link命令手动或自动创建空间关联。最后,在属性中查看设备符号的Space Reference属性,检查空间关联是否创建成功。此外,可运用B.I.Essentials命令中的Diagram: Space Allocation Review检查项对二维原理图中的设备符号进行空间分配检查,从而提高设备位置驱动的准确性。
上述2个条件满足之后,在RFLP结构树中激活Physical节点,切换至Electrical 3D Design模块或Piping & Tubing 3D Design模块。接着,运用Logical to Physical命令实现设备由二维到三维的驱动。最后,在三维模型中查看设备是否驱动成功。本文主要实现主机燃油供给泵向某个空间中心的驱动(见图4)。实际上,在驱动规则中也可定义设备向三维坐标点的驱动,但采用该方法无法创建设备与空间的关联,因此不能运用B.I检查。相比之下,建议采用设备向指定空间的驱动。
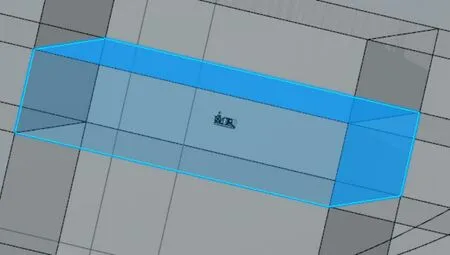
图4 设备驱动至指定空间中心
4 设备布置
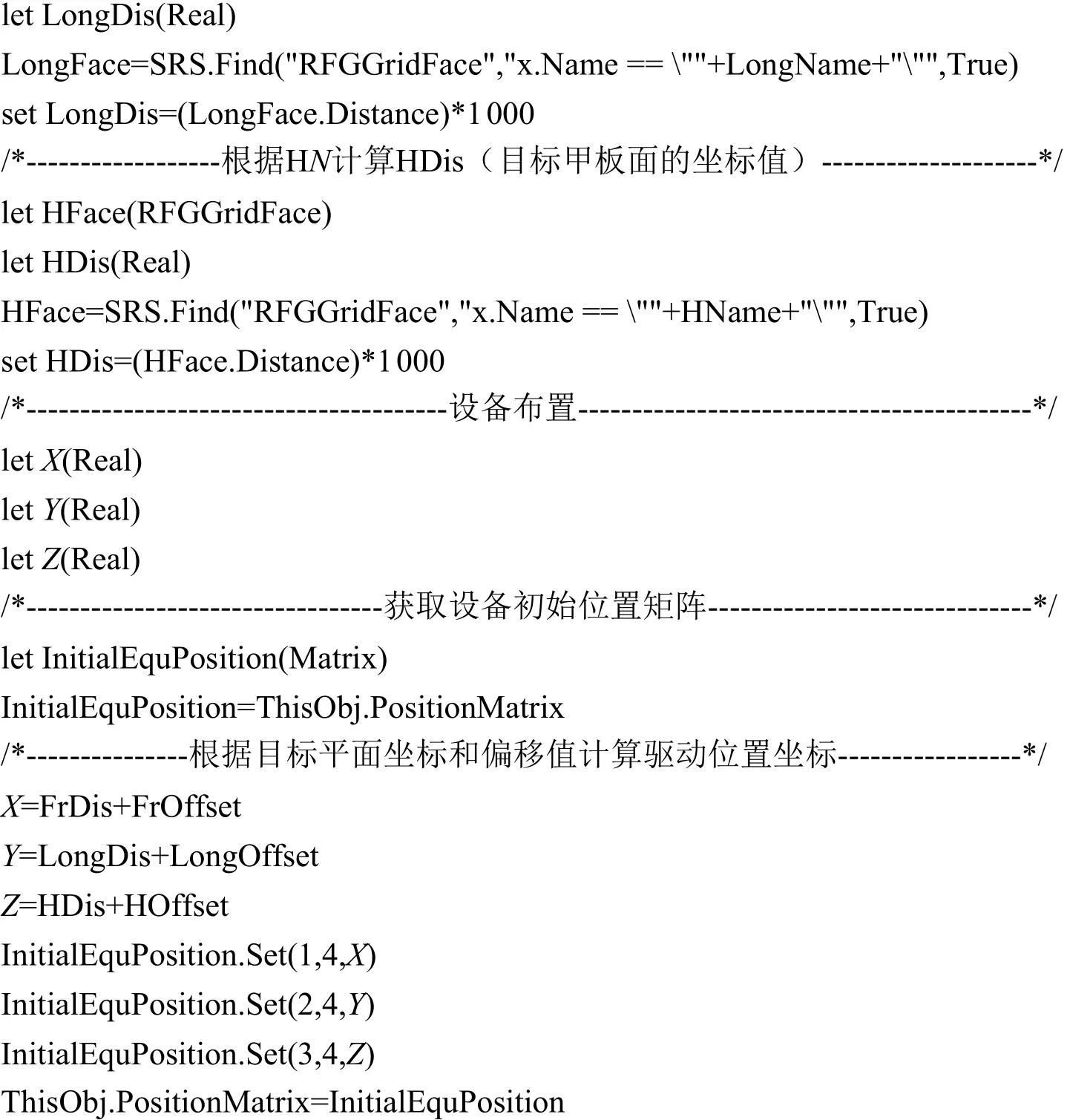
设备驱动到指定空间的中心之后,可通过操作罗盘进行位置移动和方向调整,但设备移动的位置只能粗略估计,具有较大的随意性。为了更加精确、高效地对设备进行布置,可在Engine Rules Capture模块中通过EKL编程创建Action,并将其制作成相应的设备布置命令。在使用该命令时,先选择需布置的设备和船舶坐标系,然后通过输入肋位号FrN、纵剖面编号LongN和垂向甲板编号HN的数值及各方向对应的Offset数值,即可实现基于船舶坐标系的设备布置(见图5)。
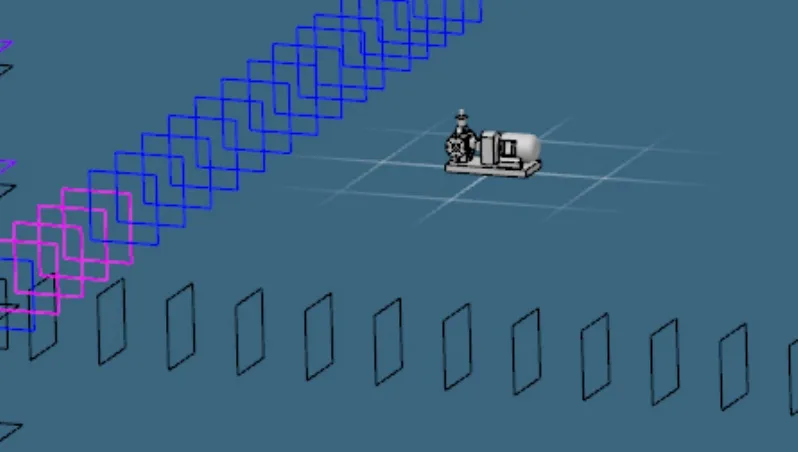
图5 基于船舶坐标系的设备布置
部分核心代码如下:

5 结 语
本文基于3D Experience平台,重点研究了船舶设备的位置驱动和布置方法,主要包括以下几个方面内容:
1) 结合SAO和GSD 2个功能模块,提出了空间划分的方法,并实现了全船的空间划分。
2) 从资源库配置、驱动条件和驱动过程等方面详细介绍了L2P设备位置驱动方法的使用,搭建了二维原理图设计与三维模型设计之间的桥梁。
3) 通过EKL编程设定了设备位置驱动规则,在创建设备符号与空间的关联的基础上实现了设备向指定空间中心的驱动,为后续针对空间编写设备报表创造了条件。
4) 通过EKL编程实现了基于船舶坐标系的设备布置,与罗盘拖动相比,提高了设备布置的准确性和效率,有助于设计者快速、高效地开展总布置设计。
经某PSV和某集装箱船的实船应用,证明该方法高效、精准,是开展基于3D Experience平台的设备布置的有效方法。
