水下矢量推进器研究综述
2019-05-16肖晶晶
张 帅,肖晶晶
(厦门大学 航空航天学院,福建 厦门 361102)
0 引 言
海洋属于国家非常重要的战略资源,在生存资源日益枯竭的当下,海洋资源显得尤为重要。而船舶和潜水器是开发水下资源的排头兵,对于船舶和潜水器来说,操纵性和机动性是非常重要的指标。
推力矢量技术概念来源于飞行器设计技术,飞行器的推进系统除了在直线方向提供推力外,还能同时或者单独在运动物体的俯仰、偏航、横滚等其他方向上提供推力,即推力的矢量化。随着时代的发展,人们越来越重视水下推进技术的研发,将矢量推进技术应用于水下,可有效提高船舶及潜水器的机动性和操纵性,具有矢量推进技术的水下推进器称为水下矢量推进器。
水下矢量推进器不仅在海洋资源探索方面意义重大,在军事、科考等方面同样具有非常重要的现实意义。随着近年来仿生推进、磁流体推进等推进方式的发展,水下推进方式呈现出多元化、多样化的发展趋势。但是鉴于技术发展的时间较短,新兴的推进方式无法较好地克服自身的不足,比如仿生推进具有高度的机动性能和高效的推进效率,但是目前的技术难度较大,较难应用于大型的潜水器;磁流体推进方式拥有出众的静音效果,但是目前技术不够成熟、建设成本太高、航行速度太慢等原因同样影响其大规模应用。
目前主流的水下矢量推进器的推进方式是螺旋桨式和喷水式,而其中又以螺旋桨式应用最为广泛,本文针对这2种方式进行综述,其基本分类框架如表1所示。
1 螺旋桨式矢量推进器
螺旋桨式矢量推进器主要分为传统螺旋桨式、变矢量螺旋桨式、并联式、串联式和吊舱式等。
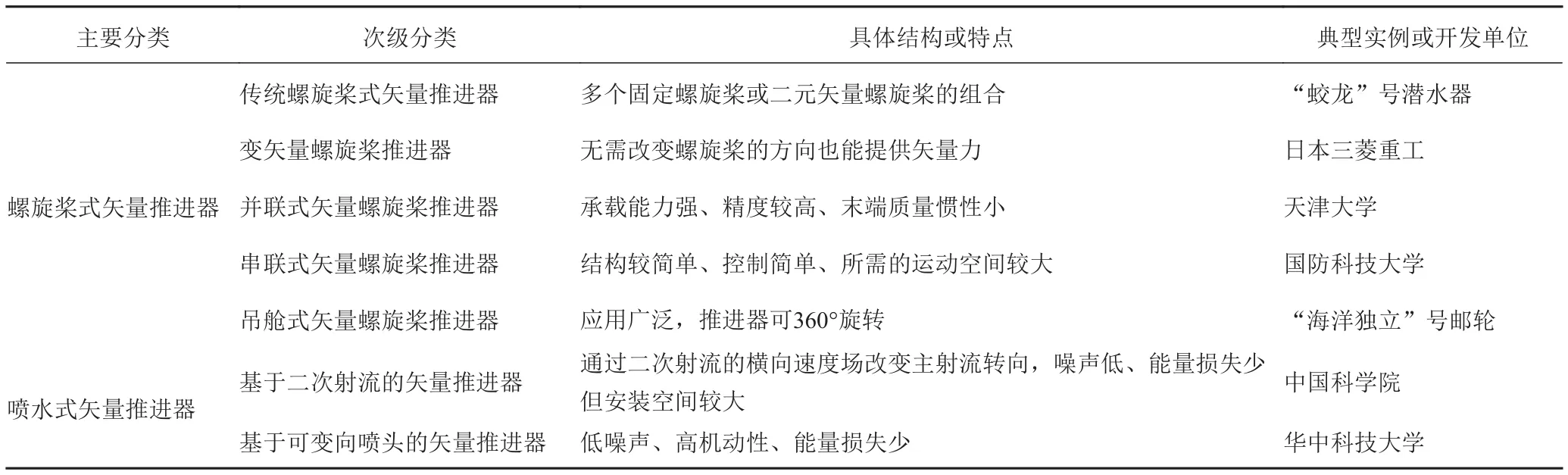
表 1 水下矢量推进器的主要分类及特点Tab. 1 Main classifications and features of underwater vector propulsion devices
1.1 传统螺旋桨式矢量推进器
传统螺旋桨式矢量推进技术主要应用于自主式潜航器,这种推进方式是在水下潜器的周围布置多个固定螺旋桨或者固定螺旋桨和二元矢量螺旋桨搭配式组合,每个固定螺旋桨只能进行自旋运动,每个二元矢量螺旋桨既可以自旋又可以进行偏摆或回转运动。如图1所示,该水下潜器是由麻省理工学院研制的1台AUV,在其前后左右均有1个固定的螺旋桨,从而可以控制其几个方向的运动。但是由于其非流线型并且所使用的部分固定螺旋桨的利用率不高,所以其局限性较大[1]。
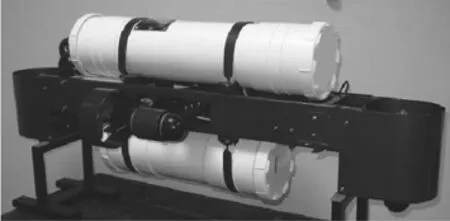
图 1 麻省理工大学的 AUVFig. 1 AUV designed by MIT
我国自主设计建造的潜水器 “蛟龙”号采用的是固定螺旋桨和二元矢量螺旋桨组合矢量方式,其拥有4个固定管道桨、2个旋转管道桨以及1个槽道桨。通过操作控制系统,能够让载人潜水器拥有实现六自由度的空间运动能力[2]。
传统的螺旋桨式矢量推进器使用堆积组合螺旋桨数量的方式来实现水下潜器的六自由度运动。该种方式的优点是实用性、高效性,没有复杂的传动系统,矢量推进方式较简单,缺点是由于潜水器外部需要布置多个螺旋桨,整个潜水器的外形结构更加复杂、水动力性能降低。
1.2 变矢量螺旋桨推进器
变矢量螺旋桨推进器又称为全方位螺旋桨推进器,它是一种在桨叶旋转一周的过程中,叶片螺距角作周期性变化的特种推进器,不同于其他螺旋桨推进器,其最大的特点是在螺旋桨桨叶旋转的过程中,通过控制叶片螺距角的周期性变化,从而能够产生上下、前后、左右6个方向的推力[3]。
全方位螺旋桨推进器最早出现在1961年美国人F.R.Haselton发明的潜艇上,当时这个系统在潜艇前后方将2个同样的全方位推进器串联安装,构成了潜艇的推进系统,通过前后桨的反向旋转可以发出任何方向的推力和转矩。1987年,美国制造商AMETEK Straza Division发表了1篇装配全方位推进器的载人潜水器的报道。不久,G.M.Stenovec等发表了将F.R.Haselton的发明装配到潜水器上的文章[4]。
日本研究人员在20世纪80年代进行模型试验,并发表了试验结果和基于准定常理论的数学计算模型,此后日本将这种推进器应用于潜水器和水下机器人,取得了较为明显的效果。
迄今为止,国内对全方位推进器的研究大多数停留在水动力性能计算方面。黄胜[5]对螺距调节式全方位推进器的研究取得了初创性的成果,研究工作体现在对螺距调解式全方位推进器的工作原理和水动力性能预报方法进行了研究,对螺距调解式全方位推进器水动力性能进行了计算,所得到的计算结果与日本相关方面的实验结果吻合良好[6-7]。
通过使用全方向推进器可以减少动力系统的传动部件,增加潜水器的操纵性、机动性,减少潜水器的重量和体积,改善潜水器的结构强度以及潜器内部的总布置,降低噪声并节约能量,因此具有重大的应用价值。
1.3 矢量螺旋桨推进器
以下矢量螺旋桨推进器均是使用单个螺旋桨,利用一些传动系统等附加的机械机构,通过改变螺旋桨的方向来实现矢量推力的示例。
1.3.1 并联式矢量螺旋桨推进器
并联机构简称PM,其特点是动平台和定平台通过至少2个独立的运动链相连接,机构具有2个或2个以上自由度,且以并联方式驱动。
1)双控制臂矢量推进器
图2为基于球齿轮柔性轴的矢量螺旋桨推进器,其主要以1个主驱动电机和2个直线电机作为动力源,核心部分是由球齿轮和万向节组成的柔性轴,该柔性轴能够满足向各个方向转向的要求。主驱动电机是保持螺旋桨在当前姿态下自旋的动力电机,其产生的动力通过一系列的传动部件最终到达螺旋桨,满足螺旋桨的转向转速需求。2个直线电机在两侧相互配合使得推力环发生偏转,从而可以使螺旋桨向各个方向偏转,实现推力方向的改变[8]。

图 2 主动矢量推进装置三维图Fig. 2 Three-dimensional graph of active vector propulsion device
2)三控制臂矢量推进器
图3为采用3-RPS与SPS组合机构的并联式矢量推进器。主推电机控制螺旋桨转速,主推电机的连接轴与螺旋桨连接轴通过万向节连接,3个作动筒通过球铰链来控制螺旋桨的偏摆,作动筒的驱动是靠内部步进电机驱动丝杠螺母副来实现。当装置螺旋桨需要做偏摆运动时,3个作动筒相互协调通过丝杠螺母和球机铰链完成角度偏转[9]。
1.3.2 串联式矢量螺旋桨推进器
串联机构特点是若干个单自由度的基本机构顺序联接,每一个前置机构的输出运动是后置机构的输入。
1)基于齿轮系串联式矢量推进器
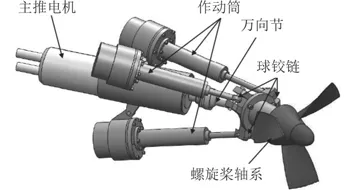
图 3 并联式矢量推进器三维图Fig. 3 Three-dimensional graph of parallel vector propeller
如图4所示,该矢量推进器的传动系统主要是由锥齿轮和直齿轮、传动轴组成,3个电机构成整个推进器自转和偏摆的动力源。它主要有滚转传动链、偏摆传动链、自旋传动链3个传动链。滚转传动链与偏摆传动链串联,共同控制螺旋桨的空间位置[10]。

图 4 基于锥齿轮的矢量推进器机构三维图Fig. 4 Three-dimensional graph of vector propeller mechanism based on bevel gears
2)直接串联式矢量螺旋桨推进器
浙江大学设计了一种串联式的矢量推进装置,主要由螺旋桨以及3组电机组成,3组电机各自控制上1组电机在1个自由度上的运动,第1组电机的输出轴水平放置并与螺旋桨连接,第2组电机输出轴竖直设置并且与第1组电机的壳体固连,第3组电机固定于潜水器的尾部并且与第2组电机的壳体固连。3个电机中后1组电机的输出端是前1组电机的输入端,可实现串联式矢量推进控制[11]。
1.4 吊舱推进器
吊舱推进器由于其巨大的实用性,故单独将其归纳作为一类水下矢量推进器。吊舱式推进器简称POD推进器,由于其较先进的设计理念和全新的推进方式而广受青睐,其广泛应用于潜艇、旅游船只、货运船只、破冰船只等。
吊舱式推进器的原理是把船舶的推进器密封于1个吊舱内,该吊舱内有动力电机和驱动轴并且吊舱可以360°旋转,这种方式集成了传统船舶推进装置的固定动力源和方向舵的功能,把动力装置和转向装置全部集成在船体的外部,节省了大量的空间,有助于船舶的操纵,提高了船舶的灵活性。
正是由于吊舱推进器有着创新性的突破,其受到很多公司和科研工作者的追捧。例如:日本科学家把高温超导电机利用到吊舱推进器中;加拿大科学家对吊舱推进器装置进行了详细的受力分析;美国海军和MIT进行合作并研发了一种新型的吊舱推进器,并且比较好地完成了当初的设计指标[12 – 13]。超级邮轮 “海洋独立”号动力系统采用的是吊舱式推进器,其船底前部还有转向螺旋桨,在转向螺旋桨和吊舱推进器的共同作用下,巨大的船身拥有非常小的转弯半径,可以灵活控制船体位置,因而可以在比较狭小的港口停泊。

图 5 吊舱式推进装置三维图Fig. 5 Three-dimensional graph of POD propulsion device
2 喷水式矢量推进器
喷水推进器是利用推进泵高速旋转,产生从进口到出口高速流出的水流,利用作用力与反作用力的原理,产生前进的推力。
喷水推进器相较于螺旋桨推进器,具有更高效的推进效率、更优越的抑噪抑振能力、更好的尾流处理效果、对泵的保护更好等优点,在一些需要高速、高静音要求、军用等特殊情况下,喷水推进器有着不可比拟的先天优势。在20世纪50年代,喷水推进器只是较多地应用在内河低速的船舶上。到了60年代,喷水推进器越来越多地应用在高性能船艇上。在70年代中期,英国第1个将喷水推进器应用于其核潜艇Sovereign号上,美国和法国也相继在其作战核潜艇上应用喷水推进装置[14]。
目前应用较多的喷水矢量推进器大体可以分为两大类:基于二次射流的矢量推进器;基于可变向喷头的矢量推进器。
2.1 基于二次射流的矢量推进器
图6是1种基于横向二次射流的水下矢量推进器。该设计的主要原理是在主推进器的四周均布数个二次射流装置,二次射流装置射流方向与主推进器的射流方向垂直,所以在二次射流的横向速度的影响下,主射流的流向就会相对应地发生偏转,通过控制主推进器周围不同的二次射流的流通速度大小就可以改变主射流的偏转[15]。
二次射流的方式改变推力的方法没有推力损失,能够有效地改变射流方向,但是储存二次射流需要一定的空间,增大了整个推进器的体积,并且这种方式在实际使用中主射流的偏转角度有限。

图 6 基于横向二次射流的喷水矢量推进器Fig. 6 Waterjet vector thruster based on cross second flow
2.2 基于可变向喷头的矢量推进器
可变喷头式矢量推进方式包括单喷头式和多喷头式,单喷头矢量推进器的特点是喷头可以俯仰和偏摆,1个喷头就起到了动力推进+舵的作用,而多喷头矢量推进器往往不能在单一喷头上既满足俯仰又满足偏摆的要求,需要多个低自由度矢量喷头一起协同运作来满足多自由度运动的要求。
1)单喷头矢量推进器
图7是1种基于3-RPS的矢量喷水推进器,该推进器由3个液压杆定向调节控制其喷头的转向,喷头的动力源是1个水压泵装置,该设计有潜力具备军事上的高速度、高机动性、声隐身性等要求[16]。
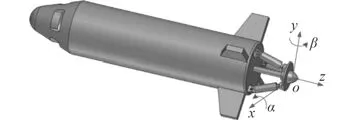
图 7 基于 3-RPS 的喷水矢量推进器三维图Fig. 7 Three-dimensional graph of waterjet vector thruster based on 3-RPS
2)多喷头矢量喷水推进器
国防科技大学设计了1种水下潜器的矢量推进装置,在潜器的尾部和两侧分别设置了1个平面矢量推进器,潜器两侧各有1个可以360°旋转的矢量喷头。当潜器需要前进后退、升沉或者摇摆时,只需控制两侧和尾部的矢量喷头即可[17]。
该矢量推进器的缺点是由于3个矢量推进器均是二元的,致使潜器无法直接进行侧向移动。
3 发展趋势分析

图 8 多喷头矢量喷水推进器三维图Fig. 8 Three-dimensional graph of vector thruster based on multi waterjet propulsion
综上可以发现,螺旋桨式矢量推进方式依然是水下矢量推进方式的主流,而传统螺旋桨矢量推进方式更是依靠其强大的实用性、可靠性和简便性,在今后相当长的一段时间内依然将会是潜水器水下矢量推进方式的首选。今后矢量推进方式中将会更多地出现固定螺旋桨、二元矢量螺旋桨、三元矢量螺旋桨三者的混合搭配。变矢量螺旋桨推进方式是1种新型的推进方式,相信在未来会成为替代传统螺旋桨矢量推进方式的重要力量。喷水推进的矢量化在某些应用中也较广泛,正逐渐在某些特殊领域替代螺旋桨矢量推进器。
每一种推进器都有各自的优点及缺点,如果能根据其不同的优势,把其中不同的推进方式结合起来形成一种新矢量推进方式,在不同的工况之下,推进器种类之间能相互配合达到优势互补,这样或许会产生意外的效果。随着仿生推进、磁流体推进等其他推进方式的发展,相信越来越多的2种或者2种以上的混合推进方式也会逐渐被学习和应用。
4 结 语
对于船舶和潜水器来说,操纵性和机动性无疑是一个非常重要的指标,水下矢量推进器的出现就是为了提高船舶和潜水器的操纵性和机动性,提高人类开展深海探索的能力。
本文综述了螺旋桨式和喷水式水下矢量推进器的分类和实例,由于很多水下矢量推进器设计还未完全产业化,还有些是存在于实验室或者科研人员的专利和论文中,所以本篇综述很大部分是对国内外实验室研究或者是论文构想进行的分类整理和归纳拓展。