基于车路协同的高速公路弯道危险预警系统设计
2019-05-15洪晋夫
洪晋夫
(山西交通控股集团有限公司,山西 太原 030006)
1 概述
车辆行驶过程中,交通事故的发生往往会造成巨大的损失。高速公路在给人们出行带来便捷的同时,也由于车辆事故的发生,带来了出行安全隐患[1]。尤其是在车辆驶入高速公路弯道时,由于车速过快导致离心力以及转向力的失控,侧滑、翻车等现象常有发生。多年来,关于如何避免高速公路事故发生的研究中,侧重点大部分都是关于车辆本身预警系统,而对高速公路弯道预警的研究并不多,也没有可依据的理论结论等[2]。我国高速公路系统相对发达,道路直行段的相关警示预警标志灯系统相对完善。高速公路弯道具有特殊性,普通的标志性预警方式并不能真正起到警示作用,对降低弯道事故发生率意义不大[3]。结合目前关于道路预警方面的研究,本着降低弯道事故发生率,提高弯道行驶安全的目标,针对高速公路车辆易发生侧翻、侧滑的情况,本文设计了一套基于车路协同的弯道预警系统,具有重要的现实意义。
2 系统设计
针对不同的车辆模型、不同的路况环境情况以及目前我国公路系统中使用的相关设备,设计高速公路弯道处的路测预警系统。车辆在进入弯道前,提前警示驾驶员注意,并采取相应的预防性措施,从而尽可能降低弯道事故发生率。该弯道预警系统安置在高速公路路测,基于车路协同背景进行设计,组成模块可以分为:参数采集模块、参数计算模块和预警反馈模块。参数采集系统主要包括收集车辆、环境等相关数据的各类传感器,采集到的数据经过汇总,递给参数计算系统,经过计算系统逻辑运算,得出目前车辆运行是否存在安全隐患,并将结果传递到预警反馈系统,预警反馈系统将接收到的信息转换成可识别的语言数据,显示在路测的LED 显示屏上。各模块逻辑关系示意图见图1。

图1 系统弯道预警系统
2.1 系统组成
基于车路协同的高速公路弯道预警系统,以路测为着力点,旨在有效防止车辆转弯时侧滑和侧翻等情况。系统的参数采集系统包括无线传输设备、数据处理器、雷达传感器、摄像机、固定测速仪、传感器、预警反馈设备等,能够及时准确地采集车辆相关参数,包括车辆型号、车牌号、车速以及调取车辆经过收费站时的称重数据等信息;行驶环境相关参数,包括天气环境、道路路面环境以及道路弯道相关参数。将采集到的相关参数传输到参数计算系统中,通过系统计算,将车辆在转弯时的安全数据计算出来,并通过预警反馈系统,将该车信息显示在路测的系统显示屏上,提醒驾驶员采用正确的规避方式,避免弯道事故发生。系统设计的技术路线如图2 所示。

图2 系统技术路线图
系统设计在高速公路收费站,车辆信息无线传输装置用来采集传送车辆型号和车牌号以及车辆载重等固定信息,其余信号采集装备可以安装在弯道处的路测,如图3 所示。环境参数相关传感器以一定的采集频率,监测并传输相关环境参数,参数直接上传到参数计算系统。在车辆驶入弯道监控区后,与收费站处信息进行对比,并下载相关车辆固定参数,同时将其传输到参数计算系统。高速公路测速仪在弯道路测监测车辆行驶速度,上传至参数计算系统。计算系统通过对各路径传递来的数据进行汇总计算后,得出弯道行驶安全度数据,并将结果传递到预警反馈系统,预警反馈系统将接收到的信息转换成可识别的语言数据,显示在路测的显示屏上。系统示意图见图3、图4。

图3 系统道路断面示意图
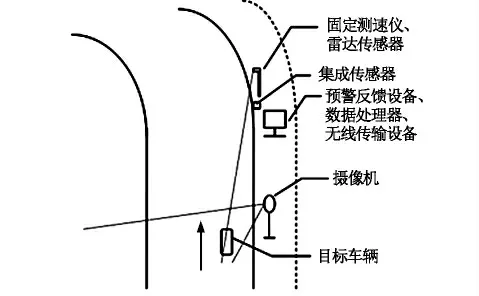
图4 高速公路弯道预警系统示意图
2.2 系统参数
弯道预警系统中最为核心的点在于数据采集的准确性,只有采集的数据准确可靠,分析结果才具有现实意义。参数采集系统是整个系统运行的基础,也是关键点,下面就系统采集参数进行分析。
2.2.1 车辆参数
车辆是弯道预警系统的保护目标,同时也是事故发生的主体,其自身参数是系统计算的根本,也是事故发生的直接诱因:
a)车辆在高速公路弯道时的车速,是产生弯道向心力和道路摩擦力的原因,控制不好车速,则会发生侧滑、侧翻等。
b)车辆固定参数因车辆的不同而有很大差异,这些数据对计算系统的计算结果有着直接的影响。因此,本系统需要采集的车辆参数有:车辆的行驶速度、车辆重量、车辆重心高度以及车辆轮胎轮距。
2.2.2 道路参数
高速公路的弯道路基倾斜度可以与车辆转弯时的向心力产生一定抵消,从而直接降低侧滑等事故的发生率。弯道处及其前后路段的道路参数设计组合,是影响车辆弯道事故发生的重要参数,因此科学合理的道路参数同样在该系统中至关重要。该系统设计需要输入的道路参数包括:弯道半径、道路超高、弯道前后直线路段的道路使用年限、路面附着系数。
2.2.3 环境参数
雨天、雪天等天气情况对道路附着力的影响最为直接;大风天气则对车辆受力影响很大。行驶环境以及环境对路面参数的影响,可以直接破坏安全行驶系统,使原本处于安全范围的行驶速度变为有事故风险的临界车速[4]。因此,环境参数同样是需要在系统设计中考虑到的相关参数。
针对系统设计的目的,在预警系统的中心处理系统对相关参数进行计算时,选择侧翻模型计算车辆的侧翻、侧滑临界速度v1、v2,临界速度与其影响参数的定性关系为:

通过模型设计与参数转化,计算出车辆在转弯时的行驶安全度S,行驶安全度是中心计算系统的最终输出参数。行驶安全度与其影响参数的定性关系为:

式中:v 统一选取车辆在转弯时,测速装置监测到的实时车辆转弯线性速度;S1为车辆转弯时没有发生侧翻时的临界值;S2为车辆转弯时没有发生侧滑时的临界值。系统原理如图5 所示。
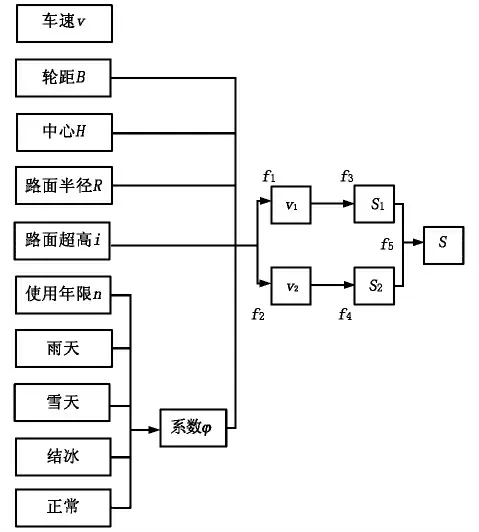
图5 系统原理图
2.3 系统工作流程
基于车路协同的高速公路弯道预警系统工作流程如下:
a)手动输入弯道道路相关固定参数,使用年限n,弯道半径R 和道路超高i,参数直接传输到参数计算模块用于对比计算。
b)环境参数相关传感器以一定的采集频率,监测并传输相关环境参数,确定弯道路段实时路面附着系数φ,参数直接上传到参数计算系统。
c)天气环境传感器数据是否发生变化,若有变化,执行步骤b);若无变化,系统运行下一步。
d)弯道处雷达传感器是否采集到车辆信息,若无,系统进入待机状态;若出现车辆信息,则立即进行后续流程。
e)将雷达传感器采集到的车辆信号与高速收费站采集到的车辆信息进行对比,并将其发送至参数计算模块。
f)相关车辆信息参数的二次确定。
g)参数计算模块进行计算运算,旨在量化车辆转弯安全度。计算是基于采集模块的车辆参数和环境参数等进行的,针对的事故情况为转弯侧滑和侧翻。
h)通过安全度的范围划分,确定该车辆是否具有事故发生倾向。
i)针对具有事故发生倾向的车辆,预警反馈设施向车辆驾驶员发布车辆预警反馈信息,提醒其采取正确措施。
3 结论
针对高速弯道侧翻和侧滑事故,设计了一套基于车路协同的弯道预警系统。通过影响事故发生参数的采集与综合计算,计算出行驶安全度。将安全度与设定安全阈值作比较,对超出安全阈值的车辆,预警反馈系统作用,提醒驾驶员,给予预警信息。