预规划的实时步态控制算法
2019-05-15丁宇杜玉晓黄修平卢冠雄曾春苗王洽蓬牛浩阳
丁宇 杜玉晓 黄修平 卢冠雄 曾春苗 王洽蓬 牛浩阳
预规划的实时步态控制算法
丁宇 杜玉晓 黄修平 卢冠雄 曾春苗 王洽蓬 牛浩阳
(广东工业大学自动化学院)
双足机器人能够在不同地形行走,而稳定的步态是其适应不同地形的前提。首先,结合地形特点和机器人位置,计算稳定的动作,即在机器人行走之前完成动作预规划;然后,通过构建运动学模型、设计姿态、稳定性判断等步骤完成步态规划;最后,通过实验验证此算法可行。
双足机器人;预规划;步态规划;运动学模型
0 引言
随着信息技术迅速发展,工业4.0和中国制造2025等战略的提出,人工智能领域受到广泛关注。人形机器人作为灵活性、适应性较高的机器人之一,能够代替人类在恶劣的环境下工作,成为国内外研究的热点。步态控制是提高机器人行走能力的重要组成部分,因此对此方面的研究具有十分重要的意义[1]。
稳定行走是人形机器人设计的难点。考虑到本团队的软硬件水平,设计了简单实用的预规划的实时步态控制算法。该算法结合机器人与地形的实际特点,通过构建运动学模型、设计姿态、稳定性判断等步骤,预先计算机器人每一步的位姿,完成步态的预先规划。机器人根据预先计算的结果调整每一步的位姿,从而保证行走稳定。
1 建立运动学模型
通过分析人形机器人关节自由度,并与人体关节自由度相对比,设计本文使用的机器人样机。机器人关节示意图如图1所示,其中一个关节即为一个舵机,图1中标号为舵机编号。运动学模型是指机器人全身各处的关节角度和各个连杆位姿之间的关系,它是双足机器人完成步态规划的基础。图1中,在机器人的各处关节自由度上创建局部坐标系,各坐标原点均位于关节自由度转动轴的中心点。

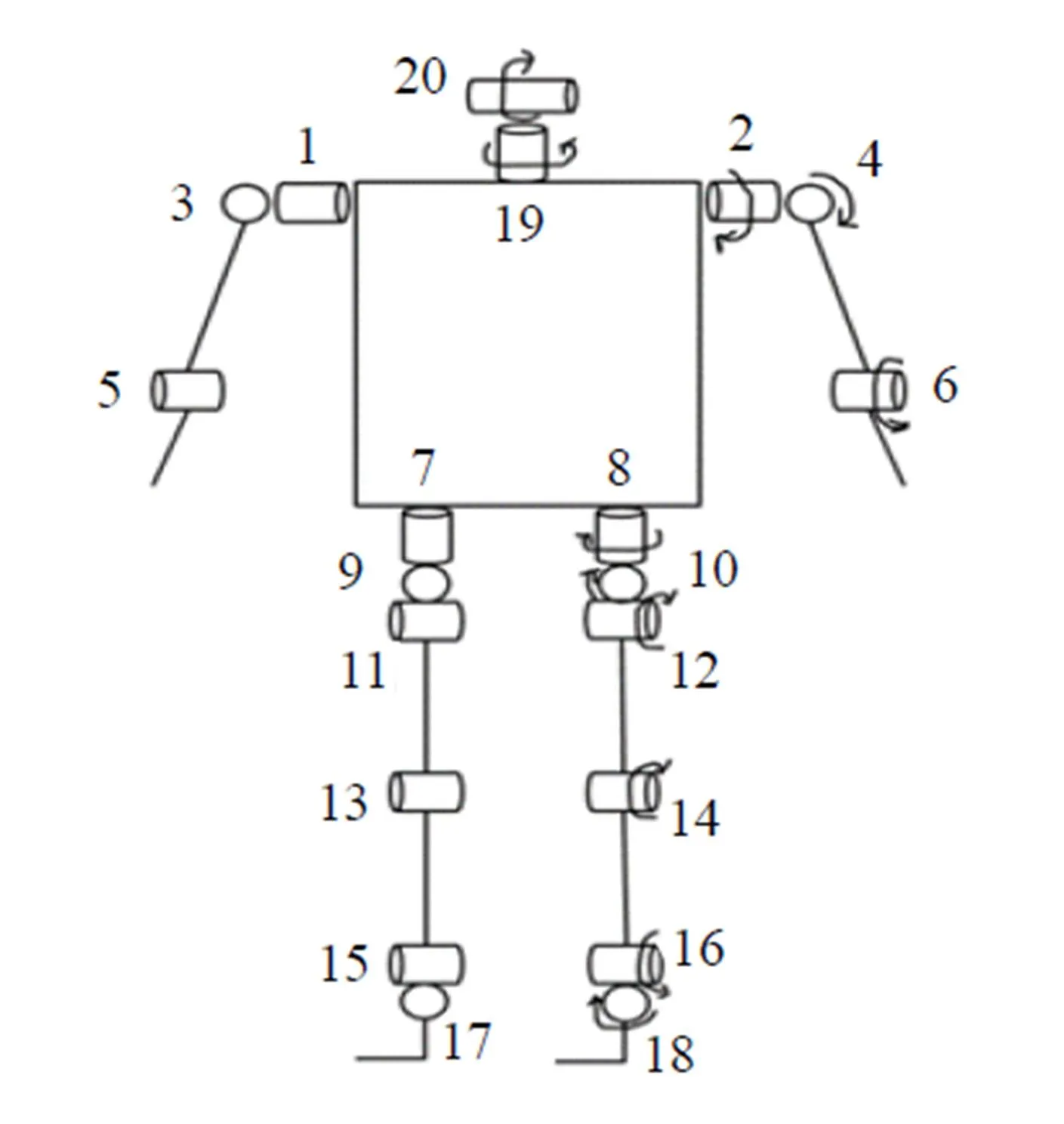
图1 机器人关节示意图
绕轴转动的齐次变换矩阵为

绕轴转动的齐次变换矩阵为
(2)
绕轴转动的齐次变换矩阵为

利用齐次变换矩阵(1)、(2)、(3)和链式法,即可通过人形机器人的各关节角度求出各连杆位姿。
2 步态规划
2.1 姿态规划
机器人的姿态是指在整个步态规划过程中,各部分组件相对于局部坐标系瞬时时刻的空间位置,可通过步行过程中瞬时时刻组建的广义坐标表示。
在机器人步行过程中,首先明确其运动需求;然后对部分关节的运动情况进行预先规划;再结合机器人的平衡关系;最后确定剩余关节的运动。
为更简便地规划姿态,可将机器人向前行走步态规划分为重心右摆、左腿上抬、重心移到中心和重心左摆等阶段[3],示意图如图2所示。

图2 双足行走步态示意图
当前行腿向前摆时,要使机器人的重心从双腿中心转移到支撑腿上,躯体要先向支撑腿一侧扭动。为避免机器人在向支撑腿侧扭动抬腿时,造成躯体向前行腿一侧倾倒,步态规划中将机器人的侧扭和抬腿分步设计,即先侧扭,侧扭到位后保持,再抬腿。
假设髋关节的侧向不发生变化,即左右腿髋关节的2个转弯关节和2个侧向关节的侧向偏转角度均为0,以髋关节和踝关节为例,求解向前或向后运动方程的步骤如下:
1)绘制关节随时间变化的曲线图,获得此关节的运动学轨迹;
2)与人类行走轨迹对比,按照行走过程的条件明确髋关节和踝关节运动受力的关键点;通过3次样条插值方式,对所有关键点进行插值处理,以简化计算过程;
3)将处理后的关键点与多项式轨迹中的五次多项式进行拟合,获得髋关节与踝关节的平滑轨迹。
2.2 平稳性判定
2.2.1ZMP稳定性判据
为保持机器人平衡,必须使机器人的质心受力平衡,否则机器人可能会倾倒。
机器人的运动轨迹需要通过零力矩点来判断。地面反作用力对人体脚部的影响比较复杂,但可以简化为作用在任意一点的力。地面反作用力对人体脚部的作用可等价为一个力与力矩,如图3所示。零力矩点就是在地面上存在一点,使得在与地面平行轴方向的由惯性力(=)与重力(=g)所产生的净力矩为零的点[4],即ZMP点。

图3 机器人脚部受力示意图
人体的站立、行走归类为下支撑状态。当人处于站立状态时,重力会通过双脚在踝关节前面构成一个支撑面,使躯体处于稳定平衡状态。当人处于行走状态时,便需要左右脚轮换支撑躯体,躯体的重心不断移动,ZMP点也随之不断移动。在单腿支撑时,ZMP点必须位于支撑脚的支撑面内,以保证躯体稳定和平衡;在换腿支撑的过程中,ZMP点需要从一个支撑面转移到另一个支撑面,这时躯体处于不稳定状态。人的行走等效于平衡状态与不平衡状态的不断交替[5]。
在步态规划过程中,ZMP是人形机器人步行稳定的主要依据。在理想情况下,实际ZMP与期望ZMP重合,且它离支撑面中央越近,机器人的步态就越稳定。这时,人形机器人的步态具有较大ZMP稳定裕度。对机器人的ZMP地面投影进行设计,使它处于稳定的支撑区域内,以维持机器人平衡状态[6]。
依据ZMP是否处于支撑区域内,判断得到的所有姿态(即机器人完成2.1所规划路径的每一步姿态)是否满足稳定性要求。如符合要求,则将这条规划的路线输出;不符合稳定性要求,则重新进行姿态规划。不同阶段的支撑区
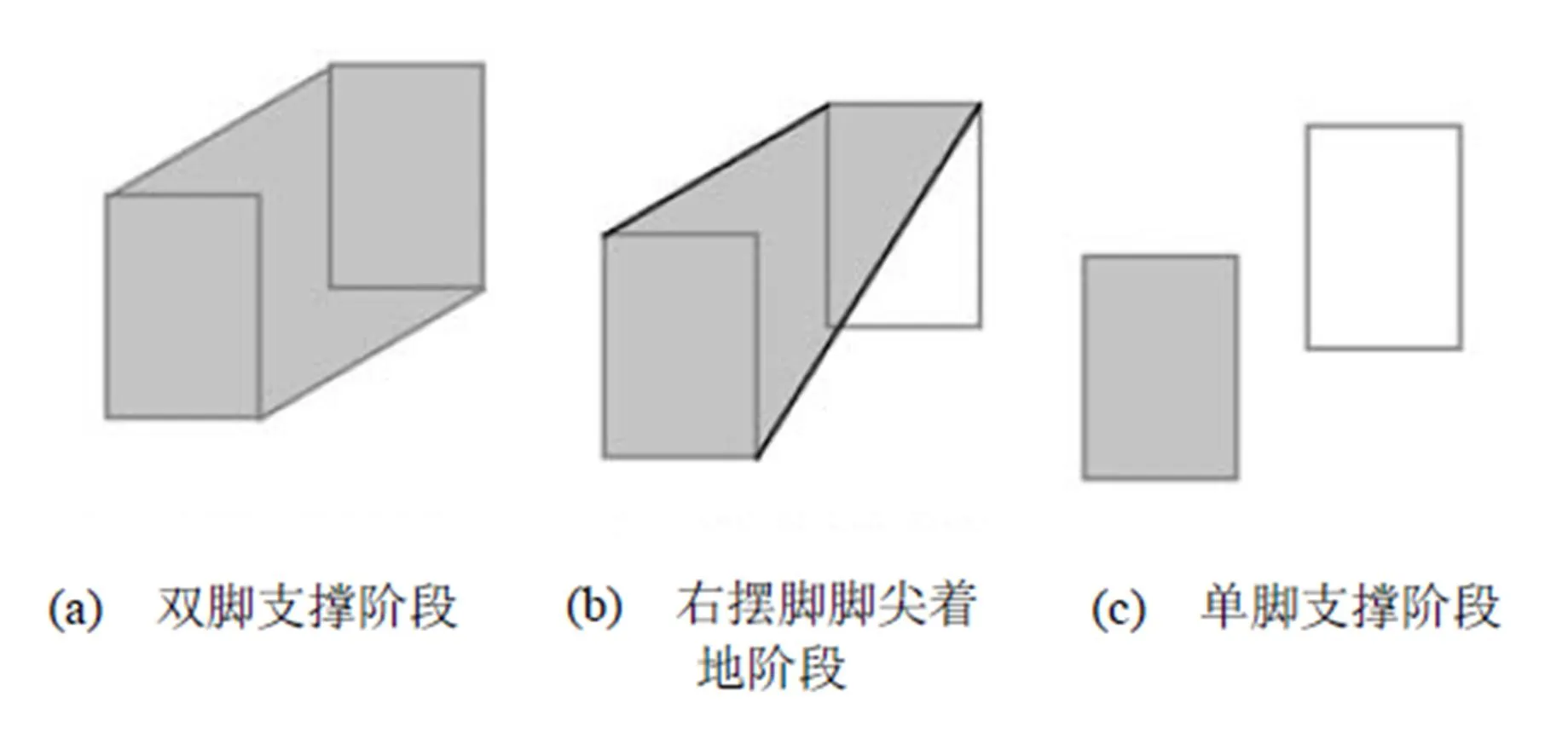
图4 不同阶段的支撑区域示意图
2.2.2ZMP坐标计算
对于所规划的姿态,计算ZMP轨迹来验证其稳定性。


绕,,轴的力矩为



可得

如果忽略惯性力的作用,则式(6)可转变为
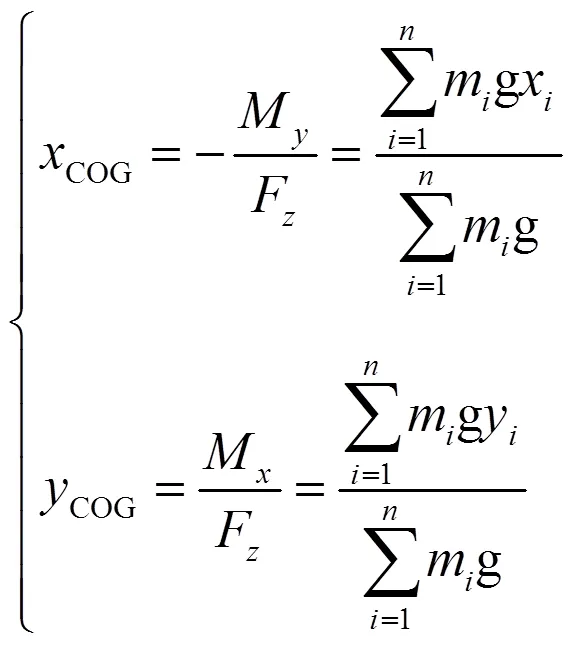
式(7)为静态步行时的ZMP,即重心在地面的投影。对比此坐标是否在支撑平面内,可判断该姿态的稳定性。
3 仿真及实验验证
本文使用Matlab机器人工具箱,搭建机器人腿部仿真模型,如图5所示。设定预规划参数,进行运动学仿真分析,得到机器人动画步行过程,如图6所示。随后将数据移植进入机器人中,进行实时步行实验,机器人能够按照规划的步态正常行走。
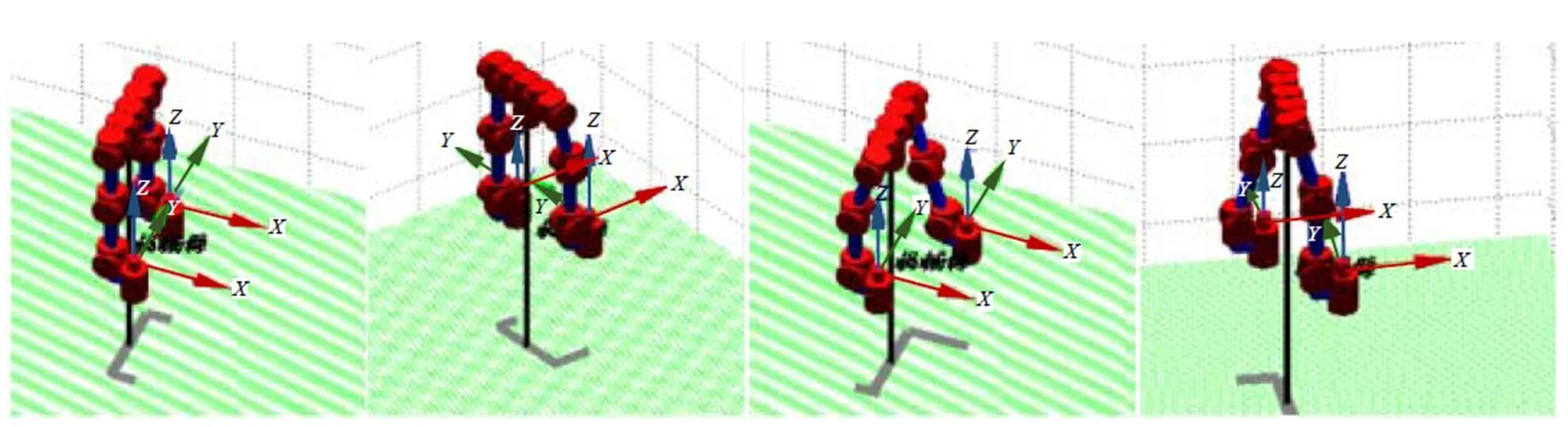
图5 步行过程Matlab仿真模型

图6 机器人步行过程图
4 结论
本文通过对人体步行轨迹的模仿来预先设计双足机器人的步态规划,解决了人形双足机器人稳定步行的问题。本文算法思路简单、易实现,但不具有自适应性,需将地形与算法中的数据严格对照,这是未来研究的重点解决目标。
[1] 赵理想,宁祎.仿生双足机器人步态规划研究现状及展望[J]. 机电信息,2016(27):122-124.
[2] 杨先娜.基于动力学建模的双足机器人步态规划研究[D].北京:北京科技大学,2009.
[3]于文成.双足机器人步态规划与控制研究[D].长春:吉林大学,2017.
[4] 窦瑞军,马培荪.基于ZMP点的两足机器人步态优化[J].机械科学与技术,2003,22(1):77-79.
[5] Erbatur, Kemalettin,Kurt, OkanNatural ZMP Trajectories for Biped Robot Reference Generation[J].IEEE Transactions on Industrial Electronics, 2009,56(3):835-845.
[6] Ferreira P, Manuel Crisóstomo, Coimbra A Paulo.Human-like ZMP trajectory reference in sagittal plane for a biped robot[C].International Conference on Advanced Robotics, 2009.
[7] 曹杰.小型仿人机器人的动态稳定步态规划[D].哈尔滨:哈尔滨工业大学,2007.
Real-Time Gait Control Algorithm Based on Pre-Planning
Ding YuDu YuxiaoHuang Xiuping Lu GuanxiongZeng ChunmiaoWang QiapengNiu Haoyang
(School of Automation,Guangdong University of Technology)
Bipedal robot can adapt to almost all complex terrain, and the stability of gait is the prerequisite for bipedal robot to adapt to terrain changes. In this paper, by combining the features of terrain and the position of the robot, the stable motion is calculated, that is, the pre-movement planning is completed before the robot walks. A series of steps, such as building kinematics model, designing posture and judging stability, are completed to complete the gait planning.
Biped Robot; Pre-Planning; Gait Planning; Kinematics Model
丁宇,男,1998年生,在读本科生,主要研究方向:自动控制、计算机网络技术等。E-mail: 1316189625@qq.con