嵌入式助航灯具清洗过程的参数优化
2019-05-14高庆吉王文周朱王振
高庆吉,王文周,王 渗,朱王振
(中国民航大学机器人研究所,天津 300300)
机场助航灯光主要用来引导飞机着陆、滑行、起飞等,其发光强度有严格的要求。而飞机轮胎摩擦、尾气污染、灰尘附着等原因,致使嵌入式助航灯具发光口污垢不断积结[1],从而导致发光强度持续下降,引导效能逐渐偏离,形成安全飞行隐患,因此,必须定期对灯具进行清洗。目前国内外成熟、有效的自动化助航灯具清洗方法较少,而常用物品清洗方法较多,如高压喷砂清洗、干冰清洗、高压水射流清洗等对清洗灯具均有借鉴价值。其中,高压喷砂清洗法利用空压机产生高压气体与清洗介质(选用固体碳酸盐粉末)混合后喷出,可用于对嵌入式助航灯具发光口的清洗。该方法具有成本低、清洗效果好、无污染等优点。而基于高压喷砂清洗法,如何以保证其清洗效果、节能和高效为目标,建立清洗工艺参数模型并进行参数优化是研究的核心问题。
Bach等[2]和Shim等[3]分别研究了水射流清洗喷头布局和高压喷气清洗条件下不同形状喷嘴对物体清洗效果的影响。于兰英等[4]研究了不同喷嘴口径对水射流清洗效果的影响。王丽萍等[5]研究了高压水射流清洗不同靶距和入射角对清洗效果的影响。但以上均未对清洗压力等其他参数与清洗效果的关系进行研究。Graube等[6]研究了冲击力和热应力对水射流清洗垃圾焚烧炉内壁的影响。宁会峰[7]研究影响高压水射流技术清洗小直径管道效率的相关因素,并基于模糊理论对清洗效率进行综合评判。但上述研究均未对相关参数进行优化。高道明等[8-10]分析了路面清洗车相关参数对清洗效果的影响并通过模糊数学方法建立了水射流清洗模型,预测不同输入条件下路面的清洗效果,并基于遗传算法对清洗参数进行优化,取得良好效果。综上所述,目前国内外尚缺乏对助航灯具喷砂清洗参数优化的相关研究。
针对助航灯具清洗参数优化问题,首先利用模糊数学的方法建立清洗参数与清洗效果的关系模型,其次设计了多目标函数并利用遗传算法进行优化,最后对优化结果进行分析得出清洗作业的最佳工艺参数。
1 清洗参数与清洗效果关系模型
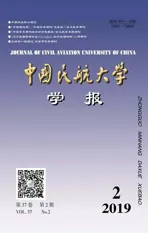
在高压喷砂清洗过程中,影响清洗效果的清洗参数包括空压机输出的清洗压力p、清洗单个助航灯具所用清洗时间t、喷嘴到灯具发光口的清洗距离d、喷头与发光口所在平面的夹角(简称清洗角度)α和喷出的高压气体中清洗介质含量比率(简称清洗介质含量)η。清洗效果是指清洗后助航灯具发光口的清洁度c,定义为清洗后洗净面积与助航灯具发光口总面积的比值。运用控制变量法得到一组清洗参数与清洁度之间的关系曲线,如图1所示。
从图1可看出,清洗参数与清洁度间的关系是非线性的,无法通过数学表达式来准确描述。模糊数学理论适用于解决这类非线性问题,故可借助该理论对清洗参数与清洗率间的关系进行建模,主要步骤如下。
1)将清洗参数 p、t、d、α、η 作为输入量,清洁度 c作为输出量,分别对其进行模糊函数隶属度划分。
清洗压力p的变化范围为0~0.8 MPa,将其划分为 4 个模糊子集 P={P1,P2,P3,P4};清洗时间 t的变化范围为 1~5 s,将其划分为 5 个模糊子集T={T1,T2,T3,T4,T5};清洗距离 d 的变化范围为 0~300 mm,将其划分为 4 个模糊子集 D={D1,D2,D3,D4};清洗角度 α的变化范围为0~90°,将其划分为3个模糊子集A={A1,A2,A3};清洗介质 η 含量的变化范围为 0~0.002 1,将其划分为3个模糊子集R={R1,R2,R3};清洁度c变化范围为0~100%,将其划分为9个模糊子集,即C={C1,C2,C3,C4,C5,C6,C7,C8,C9} 。
2)根据清洗参数模糊隶属函数的划分,将隶属度为1时对应的清洗参数作为输入量,进行正交实验,根据实验结果计算清洁度。由于计算得到的清洁度可能同时属于两个模糊子集,故根据最大隶属度原则来确定该清洁度最终归属的模糊子集,即可建立清洗参数与清洁度之间的模糊规则库。所建立的模糊规则如下
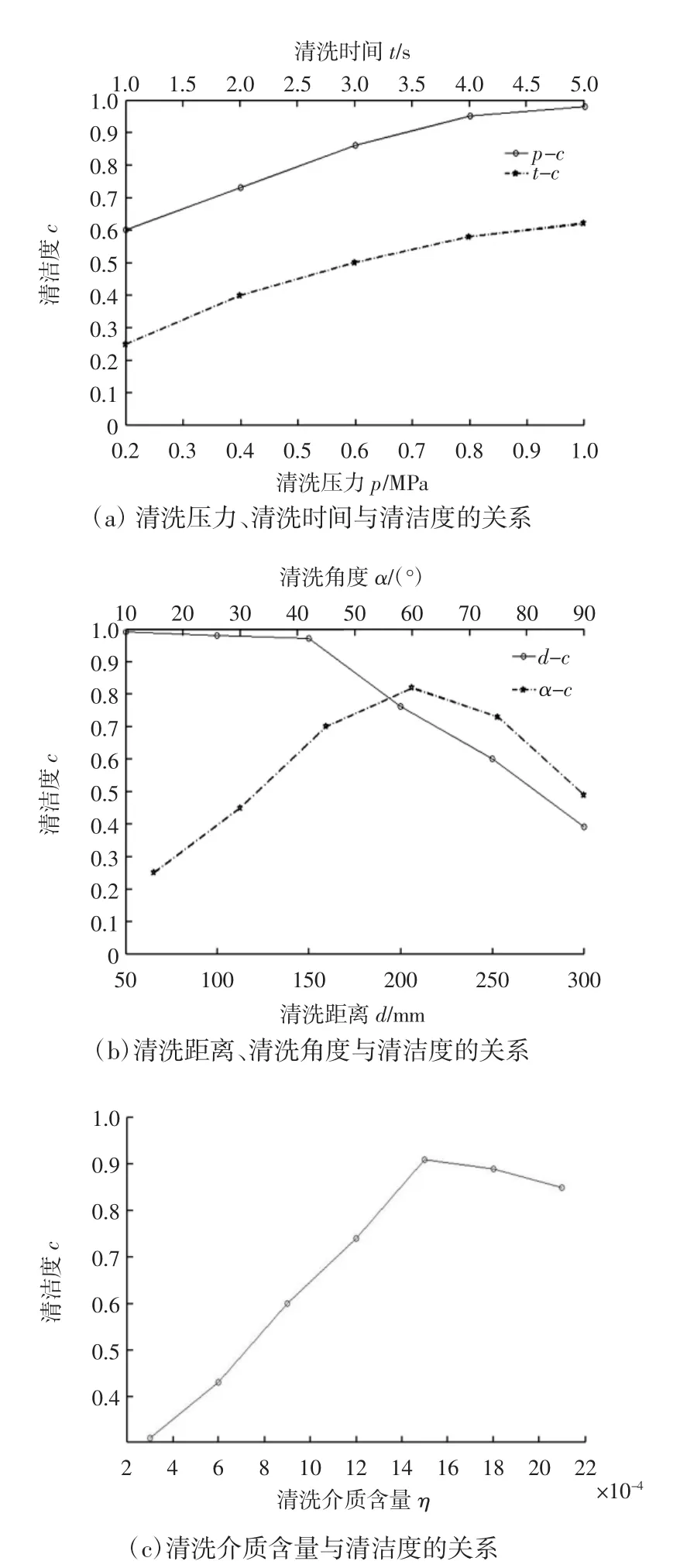
图1 清洗参数与清洁度之间的关系Fig.1 Cleaning parameter vs.cleanliness

其中:i∈[1,4];j∈[1,5];a∈[1,4];m∈[1,3];b∈[1,3];k∈[1,9];i、j、a、m、b、k∈Z。
3)利用已建立的规则库,即可对任意输入的清洗参数进行清洁度计算。根据清洗参数隶属度函数的设定可知,每个输入的清洗参数最多属于两个模糊子集。所进行的研究共有5个输入参数,则最多对应的模糊推理规则数为M=32。根据最小隶属度原则确定每条模糊规则对应输出模糊子集和相应隶属度,即

其中:fCk,n为第n条规则对应输出变量模糊子集Ck的隶属度分别为输入参数 p、t、d、α、η 在模糊子集 Pi、Tj、Da、Am、Rb中的隶属度。
由于采用输入变量的最小隶属度作为输出变量的隶属度,在输出结果中会出现隶属度很小的模糊集,其对应的结果距离真实值很远,如果计算在内,结果会产生很大的误差,为避免这一问题,对其采用了截断处理,即

其中,median(fCk,n)为所有输出变量隶属度的中位数。将所有推理结果中隶属度小于等于median(fCk,n)的去除,用余下的推理结果依据重心法求得清洁度,重心法计算式如下

其中:UCk为模糊子集Ck对应的三角形重心的横坐标值;SC(kn)为对应模糊子集在隶属度下的面积;M为模糊推理规则数。
2 清洗参数优化目标函数
在助航灯具清洗过程中,气体消耗量和介质消耗量反映了清洗资源成本,清洁度、清洗时间分别反映了清洗效果和效率。故从上述4个方面建立目标函数对清洗参数进行优化。
1)气体消耗量Q,指清洗单个助航灯具所消耗的气体总量,其间接反映了电能的消耗量表示为

其中:r为圆形喷嘴内半径;g为重力加速度;p1*为清洗压力;p2*为大气压强;λ为气体输出管道的沿程阻力系数;l为气体输出管道长度。
2)清洗介质消耗量E,指清洗单个助航灯具所消耗的介质总量,即

清洗参数的优化是一个多目标、多变量的非线性优化问题,要求清洁度最大,而气体消耗量、清洗介质消耗量及清洗时间最小。为减少各优化目标间的数值差异,对其进行单位化处理,然后为每个目标分配相应的权重计算总体函数值,优化的结果要使总体函数值F最小,目标函数如下

其中:ω1、ω2、ω3、ω4分别为气体消耗量、清洗介质消耗量、清洗时间和清洁度的权重,且co*分别为其对应的极限值;F0为修正值。
3 基于遗传算法的清洗参数优化
遗传算法是模拟生物遗传进化的优化算法,具有全局寻优能力、通用性、隐并行性、扩展性等特点,包括编码、选择、交叉和变异等基本步骤。
1)编码
采用二进制编码方法,根据清洗参数的变化范围及精度要求,清洗压力、清洗时间、清洗距离、清洗角度和清洗介质含量,依据项目精度要求分别采用7、6、9、7和8位进行编码。实际值与编码值的关系如下

其中:zw为个体w的适应度;N为种群的规模。若个体选择概率大,则能多次被选中,其遗传基因就会在种群中不断扩大;若个体选择概率小,则经过若干代后被淘汰。
3)交叉
基因交叉是在适应度高的个体之间进行基因的部分交换,从而产生新的个体。基因交叉的方式主要有3种:单点交叉、两点交叉和均匀交叉。采用两点交叉方法,任意挑选经过选择操作后种群中两个个体作为交叉对象,取交叉概率qe=0.5。
4)变异
基因变异是为了避免问题求解陷入局部最优,对于二进制的基因编码组成的个体种群,实现基因码的翻转变换,即0变为1,1变为0,取变异概率qv=0.005。

其中:Xdec为变量的实际值;Xbin为二进制编码值;Xmax、Xmin为变量的最大、最小值;y为变量编码位数。
2)选择
基因选择是根据适应度的值对单个染色体进行复制的过程。使用适应度比例选择法确定种群中个体被复制的概率。种群中个体w被选择用于复制的概率定义如下
4 清洗参数优化结果与分析
在优化过程中采用的遗传算法参数:种群规模N为30、50和100;进化次数为100。表1为气体消耗量、清洁介质消耗量、清洗时间和清洁度权重分布。表2为不同权重下的优化结果。
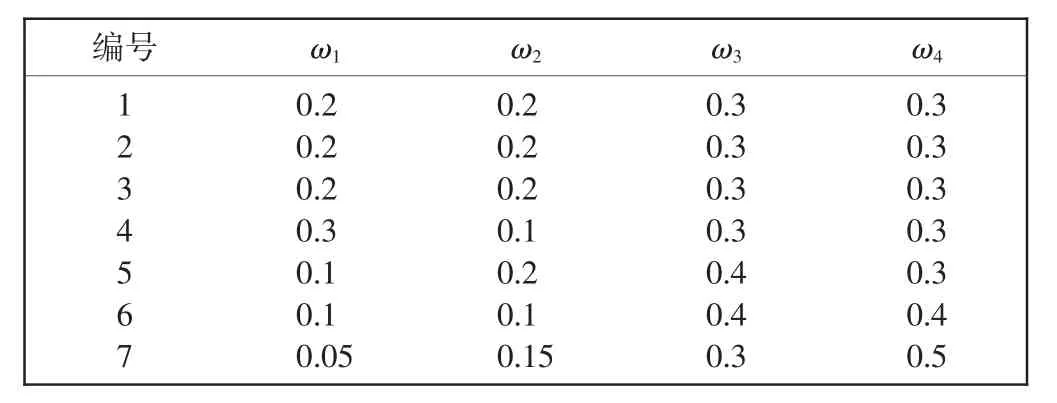
表1 权重分布Tab.1 Weight distribution
表2 不同权重下的优化结果Tab.2 Optimization results under different weights
表2中1~3行采用了3种不同的种群规模,对比可知3种种群规模下清洗参数的最优值几乎相同,因此增加种群规模对遗传算法的优化结果基本没有影响。在后续的计算中采用的种群规模均为30。由表2中1、4行可知,在清洗压力较小的情况下,增加清洗介质含量和延长清洗时间对清洗效果的改变并不明显,故在清洗过程中,为确保清洗效果应保持一定的清洗压力。由表2中第1、5行可知:减小ω1增大ω3,清洗时间明显下降,由于设置的气体消耗量权重ω1降低同时清洗时间下降导致优化结果清洗压力上升,同时清洁度达到90%以上。
从上述分析可看出,在助航灯具清洗过程中压力是影响清洗效果的首要因素。结合表2中5~7行可知控制清洗压力变化范围在0.72~0.74 MPa,清洗时间在3.1~4.0 s,清洗距离在 115~130 mm,清洗角度为 68°,气体中清洗介质含量为0.112%~0.151%,清洁度可以达到90%以上,具有良好的清洗效果,此时气体消耗量控制在15.24 L以下,介质消耗量控制在17.55 mL以内,能够较好的节约资源成本。
在使用高压喷砂设备对助航灯具发光口进行清洗时,由于喷嘴和助航灯具发光口形成一定的夹角,故将冲击力分解为垂直方向和水平方向两个分力。垂直分力主要克服污染物的吸附作用,水平分力主要负责将污染物推出清洗区域。从图1(b)中可以看出,清洁度随着安装角度的增加,经历了由小到大,然后又逐渐减小的过程,最佳的清洗角度范围应在60°~75°之间。结合表2可得到安装角度应优选为68°,即清洗助航灯具时克服污染物吸附作用的垂直力大于将污染物推出清洗区域的水平力。
5 结语
研究了一种机场嵌入式助航灯具发光口表面沉积污染物自动清洗工艺控制方法。采用模糊数学方法对清洗参数与清洁度之间的关系建模,运用遗传算法进行参数优化,定量分析了不同权重下各参数的变化趋势,并给出获得较高清洁度时各参数的最佳配置范围。结合实验数据,对参数优化结果进行分析,给出了清洗喷头的最佳安装角度,为清洗喷头的安装及自动清洗工艺规划提供了可靠的理论依据。