邻近空间链路探测器器间通信测试方法
2019-05-10陈刚吴佳丽高芫赫杨东
陈刚 吴佳丽 高芫赫 杨东
(1北京空间飞行器总体设计部,北京 100094)(2北京应用物理与计算数学研究所,北京 100094)
21世纪以来,为满足对复杂任务中多个航天器进行联合控制的需求,空间数据标准咨询委员会(CCSDS)制定了Proximity-1邻近空间链路(简称Proximity-1协议)[1]。Proximity-1协议适用于距离在100 000 km以内火星探测器的器间通信,并于2004年首次应用于奥德赛号和勇气号的器间通信。我国首颗火星探测器包括环绕器、着陆器、巡视器(火星车)三器,以实现火星全球环绕探测、火星表面巡视探测的综合目标。受质量、能源约束以及对地通信弧段等方面的因素影响,着陆器、巡视器直接对地球通信能力较弱,这就需要借助环绕器的中继通信,着陆器、巡视器先通过与环绕器进行器间通信传输器务/业务数据,再借助环绕器更强的对地通信能力进行转发。目前,我国火星探测器规划的环绕器与巡视器间的通信距离为300~15 000 km。
由于成本高、技术复杂、经济性不强等因素,深空探测任务远不如近地任务那么多,并且近地、深空探测所关注的通信指标和应用需求不同:近地卫星对通信速率、传输时延等性能指标要求高;深空探测器则对通信自主性、可靠性要求高,对速率、时延不太关注。这也导致两者在测控系统设计方面差异较大。
现有的测控通信测试方案,一是关注物理层指标,如频率、速率、纠错等;二是关注网络层指标,如拓扑优化模型,网络时延等。而Proximity-1协议的技术关键主要体现在数据链路层,且国内外公开资料极少,除了少量的系统设计方面的研究工作,系统级链路测试方面的工作几乎没有借鉴资料。我国首次火星探测任务的器间通信采用了X频段、特高频(UHF)频段器间通信两种方式,其中在UHF频段应用了Proximity-1协议,且为国内首次应用,现有测试方法无法满足这种新技术的验证需求,为验证全双工通信、链路自适应等链路高效自主操控的技术关键,本文设计了针对性的系统级测试和实施方法,并完成了系统级验证。
1 器间通信测试需求
Proximity-1协议由物理层(Physical Layer,PL)[2]和数据链路层(Data Link Layer,DLL)[3-4]构成,DLL负责完成数据组帧,服务质量控制,帧同步与纠错检错等功能,是Proximity-1协议的核心层。
Proximity-1协议定义了邻近链路传输单元[3],可传输两种数据帧:用户帧,即业务数据单元(Service Data Units,SDU)[5],用于传输基本业务数据;协议帧,即监督协议数据单元(Supervisory Protocol Data Units,SPDU),可传输邻近链路控制字(Proximity Link Control Word,PLCW)、状态报告、控制指令等。
1.1 全双工通信模式
Proximity-1协议有两种服务质量(QoS):①加急方式(Expedited),在单工模式下采用,无自动重传队列(Automatic Repeat Queuing,ARQ)机制;②顺序控制(Sequence Controlled,SC),在全双工模式下采用,通过ARQ机制、标准PLCW报告方式来保证SDU帧的可靠传输。全双工与ARQ机制[6-7]的结合使器间通信成为面向连接的可靠通信。ARQ协议在DLL实现后向纠错(Backward Error Correction),具体功能如下。
(1)差错检测,接收方对数据帧进行循环冗余校验(CRC)检错。
(2)反馈应答,接收方提供反馈信息,肯定确认(ACK)或否定确认(NAK),以帮助发送方判断数据帧是否被正确接收。
(3)重传,接收方接收错误/丢失数据帧时,请求发送方重传该帧。
(4)传输超时控制,为解决数据帧在传输时出现丢包或ACK丢失的问题,在发送端设置超时计时器,设定超时(Timeout)时间,超过该时间没有收到ACK,则重传该数据帧。
1.2 通信链路自适应机制
Proximity-1支持通信链路自适应机制:信道、编码、速率可根据信号质量进行自适应调整。
(1)信道频率,邻近空间链路UHF频段范围为390~450 MHz,其中前向435~450 MHz,返向390~405 MHz,共划分出8组频率对[2]。
(2)信道编码,不同于ARQ,信道编码[7]是在PL实现前向纠错。Proximity-1协议包含3种编码方式,即非编码、卷积码(CC)和低密度奇偶校验码(LDPC)。
(3)通信速率,自适应机制在PL实现,器间通信支持8个前向速率,1 kbit/s(编码前)和1~64 kbit/s(编码后);12个返向速率,1~2048 kbit/s(编码后)。
1.3 器间链路测试新需求
在我国探月工程中的“探测器-地球”、“探测器-中继星-地球”两种方案和普通的近地测控通信技术方案类似,特点是通信距离更远或无法视距传输需要中继通信,未涉及链路协议。全双工、链路自适应等协议技术的应用也提出了综合测试新需求,而现有测控测试方案仅关注物理层指标,无法满足Proximity-1协议的链路层指标测试需求。
(1)全双工通信是在遥远的火星(地火距离最远4亿千米,地火通信单向时延22.2 min)进行器间自主通信的重要保证;而全双工模式下的通信双方具备实时双向确认机制,且状态迁移复杂频繁,目前星间链路多关注于传统的速率、时延等指标,对通信建立中间状态并不关注,本文完成了相应的测试方法设计,以及对通信建立效率、中间状态、状态迁移等关键过程的验证工作。
(2)近火点器间通信是火星任务的主要通信弧段,火星车寿命初期的返向数据量/弧段时长约为80 Mbits/8 min。默认全双工通信建立时由于信道不稳定,初始速率定为前向32 kbit/s、返向8 kbit/s,固定速率下返向能力远达不到任务需求。而寿命初期近火点通信距离为300~1500 km,链路预算速率为2048~128 kbit/s,采用速率自适应技术的情况下才能满足数据传输需求。传统测试方案多为1档或少量几档固定速率,且均是人工判读指令切换;针对新需求,本文设计了一种速率自适应测试方法,并在信噪比(SNR)不断变化、双方通信不中断的情况下完成了速率自适应切换功能验证。
2 器间通信测试方法
2.1 全双工通信测试
器间通信的双方分别记为发起方(Caller)、响应方(Responder),且在状态建立之前,火星车无法传输返向遥测。因此所获取的遥测数据仅能记录双方的始态/终态,而不能实时跟踪过程状态(信道、速率等),并且由于全双工建立过程状态切换频繁,传统基于遥测判读的方法有效性较低。因此本文设计一种全双工通信测试方法,通过分解协议状态迁移过程(见图1),并实时监视地面设备状态,对比推演单机产品设计的合理性、有效性。
(1)先由地面设备自环测试实时记录收发双方的工作状态。
(2)在星地链路测试时记录设备状态、通过频谱仪监视星上状态。
(3)比对1~2测试过程状态迁移是否一致,记录建立时长和传输时延。
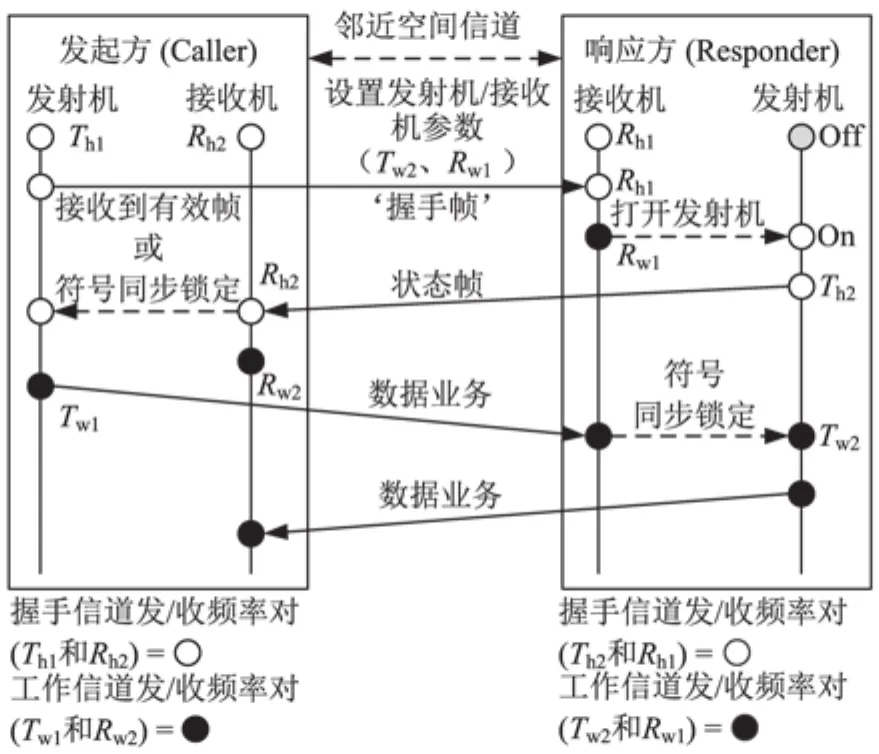
图1 通信状态迁移过程Fig.1 State transfer in full-duplex establishment
全双工通信测试方法如图2所示,在全双工通信中,收发双方的通信参数由Caller(记为C)制定,Responder(记为R)仅需要设置处于全双工响应状态即可,通信参数如下:①握手信道(Hailing),前向fh1、返向fh2;②业务信道(Working),前向fw1、返向fw2。

图2 全双工通信测试方法Fig.2 Test method of full-duplex communication
基于上述方法,本文完成了主备份UHF收发信机的全双工通信测试,测试结果见表1。主备份设备均满足10 s建立时间的设计指标,但传输时延的测试结果不同,原因在于主备份的缓冲机制不同:主份缓冲10帧数据,优点是接收方确认PLCW帧延迟不影响传输效率;备份缓冲2帧数据,缺点是PLCW帧延迟将造成ARQ重传,传输效率降低。以信道0为例,图3(a)~(f)给出了握手程序[1]Ⅰ~Ⅵ对应的通信双方发射信号实测频谱。
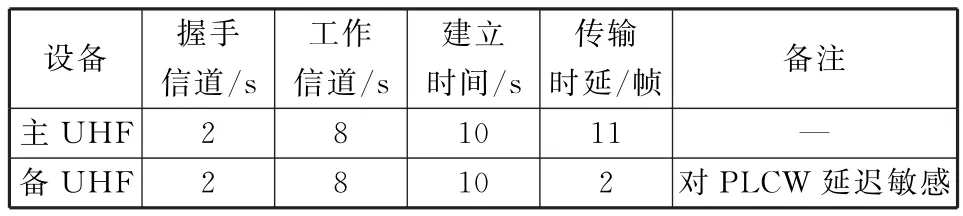
表1 短帧模式全双工通信测试结果Table 1 Test results of full-duplex communication in short-frame mode
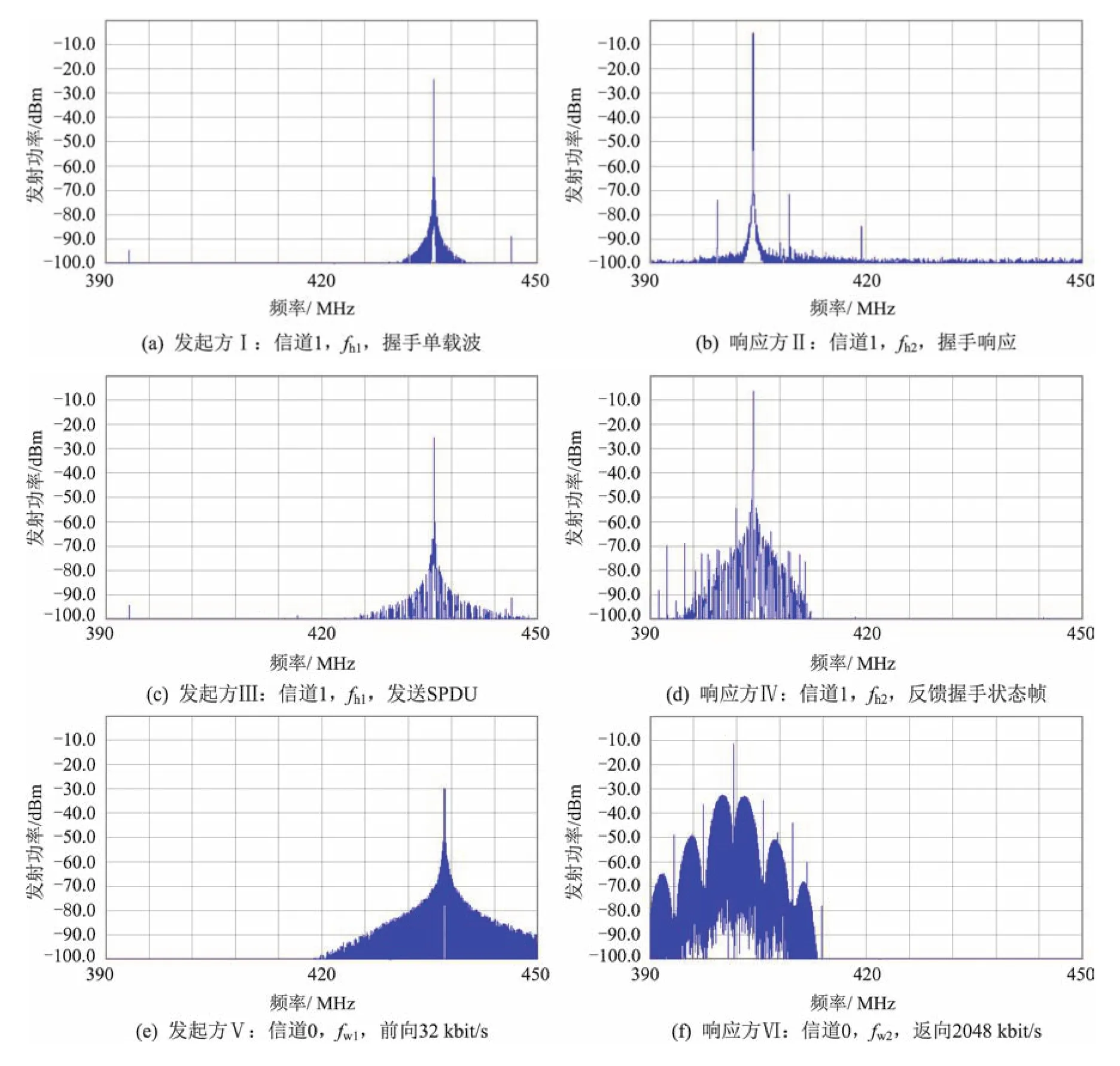
图3 全双工通信建立过程Fig.3 Process of the establishment of full-duplex link
2.2 信道编码性能测试
在深空探测器中,由于信号功率低,天线增益不足,纠错码性能便显得尤为重要。火星探测器在不同链路中采用了多种编码方式:CC(7,1/2),RS(255,223)+CC(7,1/2)级联码[4,8],LDPC(4088,1784)。各编码方案的纠错性能对比见表2,编码方案性能对比见图4。
经过分析,BER=1.0×10-6高于误码平层[7],所以使用随机码/固定码测试的性能数据基本一致。星地链路性能测试采用图5的系统结构,数据源使用固定码,误码仪可据此设置比对源。利用频谱仪可测试信号功率P和噪声功率N0·W(或功率计)。
图5的系统测试实际考核的是全链路性能,由于调制/解调器会带来一定性能损失,为了能够合理地标定编码增益,通常会给定一个系统误差Δ(一般取0.5~2 dB)。设非编码的信噪比为Eb/N0unc,考虑到信道编码的码率Rc变换,编码增益G计算如下:

其中,Eb/N0unc为未编码信噪比门限,Eb/N0cod为编码后信噪比门限,基于上述测试方法,以LDPC码为例,表3给出了硬件测试数据,分析结果与图4中的仿真性能相符合,考虑解调损失的情况下,各速率下仍能达到>8 dB的编码增益,编码性能满足要求。

表2 火星探测器不同编码方案性能分析Table 2 Performance analysis of different coding schemes
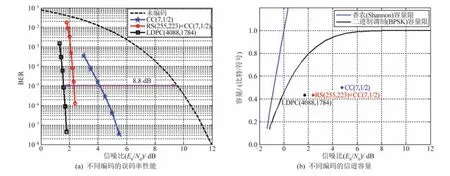
图4 火星探测器编码方案性能对比Fig.4 Comparison of different coding schemes

图5 编码性能测试系统Fig.5 Structure of the test system for coding scheme

表3 LDPC码性能测试数据Table 3 Performance of LDPC codes
2.3 速率自适应测试
器间通信是火星探测器数据传输的主要手段,且受通信距离变化、天线指向影响较大。为了更好地发挥Proximity-1协议全双工性能,利用有限的信道容量完成图像/载荷数据传输,根据当前信噪比自适应调整至最高速度显得非常重要。
目前,常见的自适应机制有两种:一种是根据误码率变化来调节;另一种是根据接收端信噪比估计来调节[9]。两种方法从不同角度反映了信道好坏。本文采用第二种方法,信噪比估计一方面反映了信道的实时状态,另一方面通过及时切换通信模式,来改善误码性能、ARQ重传效率,或提升系统容量。此外,为尽可能地模拟在轨工况,本测试方法覆盖10档速率的循环自适应切换,以充分验证Proximity-1协议的速率自适应性能。器间通信速率自适应实现如图6所示,精度指标优于1 d B,器间通信速率档自适应切换门限为3 dB。速率切换的关键环节是调节信号功率或噪声功率来模拟信噪比变化,从而触发速率自适应切换。
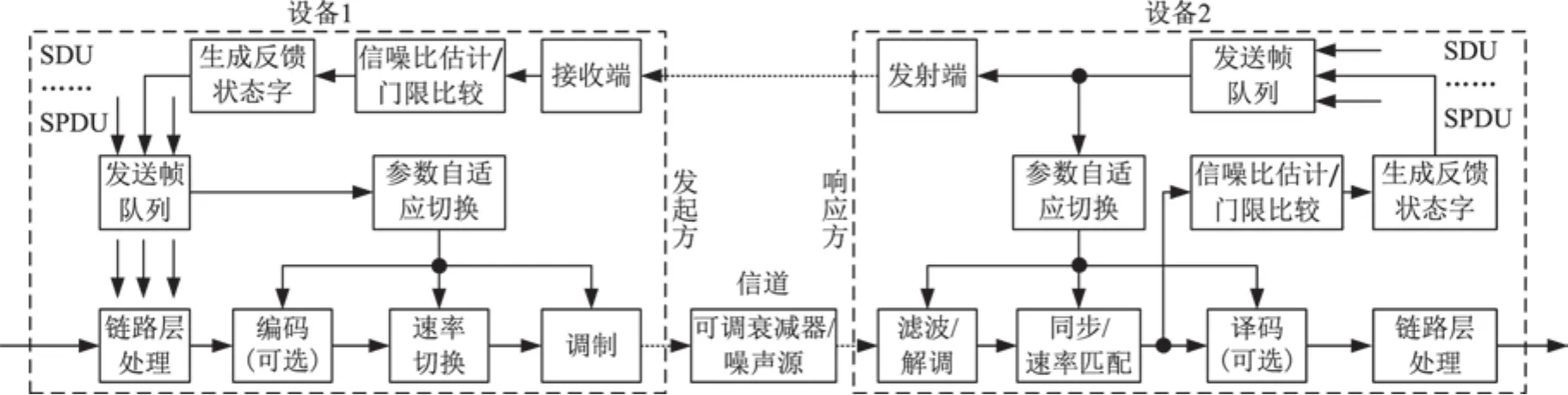
图6 基于信噪比估计的速率自适应机制测试系统Fig.6 Test system structure of rate-adaptive scheme based on SNR estimation
本文设计的基于功率调节的速率自适应切换测试方法如图7所示,记返向发射功率为P0,电缆接插件固定损耗为PL,可调衰减器为ΔP。设测试最大速率Rmax、最小速率Rmin,Rb为当前返向速率,在相邻2档速率切换时,先进行一次3 dB粗调,然后再根据信噪比估计情况进行±1 d B微调,直至速率成功切至Rb/2或2·Rb。
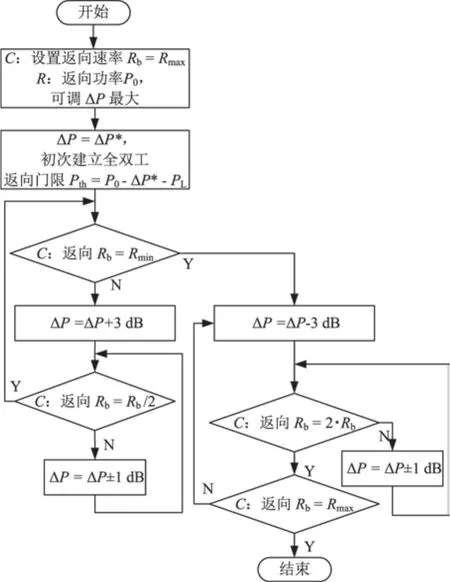
图7 基于功率调节的速率自适应切换测试方法Fig.7 Test method of rate adaption based on power adjustment
在测试中,结合3个工作信道完成了速率自适应切换验证工作,测试数据及结果见表4、5。高低速率间可双向切换,且各速率档切换门限均为3 dB左右,满足设计指标要求。此外,由于测试设备灵敏度不足,低速率档测试时功率较小且数据量变小,导致信噪比估计误差变大、测试稳定时间较长。
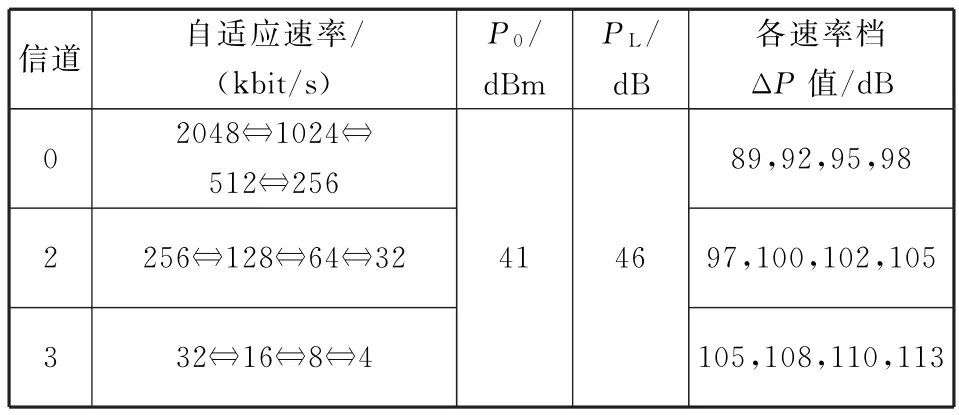
表4 速率自适应切换测试Table 4 Test schemes of rate adaption
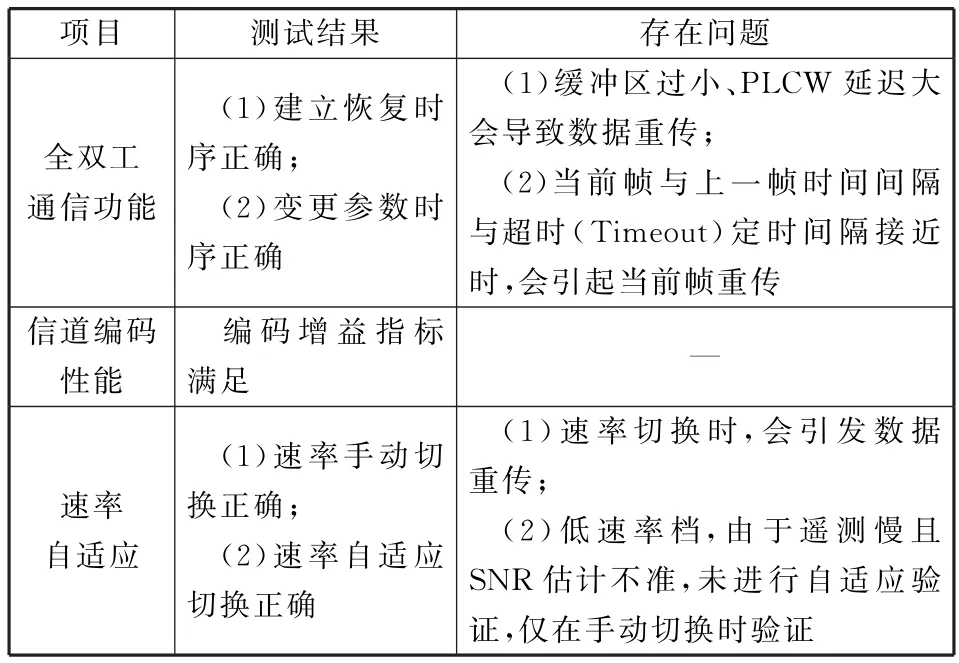
表5 测试结果Table 5 Test results
3 结束语
我国首颗火星探测器设计应用了CCSDS的Proximity-1邻近空间链路协议,其中全双工、高性能纠错编码、链路速率自适应等技术是在遥远的火星进行链路高效自主操控的关键环节。针对新的复杂邻近空间链路的验证工作,本文首先进行了测试需求分析;然后完成了“全双工通信测试方法”设计、“编码性能测试方案”设计以及“基于功率调节的速率自适应测试方法”设计等工作,减少测试用例,提升测试效率;最后基于专用配套测试设备,完成了系统级链路验证工作。经过验证,各测试项目均正确完成,同时也发现了许多协议相关的技术问题。未来将继续开展多航天器器间通信方面的全双工效能验证工作,总结经验,为后续在轨工作提供参考。