星相机高精度校时计时方法
2019-05-10宗云花于艳波邸晶晶任宇宁刘晓鹏王伟之
宗云花 于艳波 邸晶晶 任宇宁 刘晓鹏 王伟之
(北京空间机电研究所,中国空间技术研究院天基空间目标监视技术核心专业实验室,北京 100094)
星相机在轨通过拍摄星空图像、恒星识别、匹配和解算四元数确定自身方位,然后利用坐标变换以优于1″的测量精度输出测绘相机的三轴姿态数据。地面处理时将这个姿态数据代入到成像几何模型中,计算对地遥感图像实际对应的地理位置,从而实现高精度影像定位[1]。就测绘相机而言,影像定位误差主要由星相机测量误差、星相机与测绘相机安装关系测定误差、空间热环境引起的星相机与测绘相机视轴指向变化误差及时间不同步产生的姿态漂移误差等构成[2-3]。在测绘卫星中,星相机与测绘相机一体化、等温化安装,在最大程度上避免了力、热变化造成的星相机和测绘相机之间相对位置关系的改变,从而降低了星相机与测绘相机安装关系测定误差、空间热环境引起的星相机与测绘相机视轴指向变化误差。一般,国内测绘相机影像行频约为10 k Hz,时间同步精度约为5μs,在实际计算时,需要准确的每行影像对应的姿态数据,因此星相机的时间同步精度应优于测绘相机的时间同步精度,从而减小时间不同步产生的姿态漂移误差。
为满足立体测绘处理的精度要求,在测绘卫星的设计中必须考虑提高姿态测量和时统的精度[4]。一般,卫星只配置星敏感器,其主要作用是测量卫星姿态,时间同步精度约50μs[5],不能满足高精度测绘定位精度所需要的优于5μs的要求,因此需要研究应用于星相机的高精度时间同步方法。但是,目前传统星相机时间同步方法,由于只记时不对自身的时钟进行校正,存在较大的系统误差,无法实现优于5μs的要求。本文提出高精度校时计时方法,利用星相机调节自身设备时钟使其与卫星时标严格对准,并精确记录对准误差,最终可实现与卫星时间基准信号(以下均称为卫星同步信号)的时间同步精度优于1μs,从而提高测绘定位精度。
1 高精度校时计时方法
星相机系统组成如图1所示,一般包括控制同步器、星相机A和星相机B。星相机利用镜头将瞬时视场中的若干恒星成像于光电探测器上,通过图像处理与已有星表对比,得出星相机在空间惯性坐标系的瞬时姿态,完成姿态测量,进而通过坐标变换得到同时刻测绘相机系统在空间惯性坐标系的姿态测量[6],控制同步器完成2台星相机加断电控制、时间同步、恒星成像等。控制同步器通过硬件接口接收卫星GPS接收机输出的时间同步信号(秒脉冲信号),同时通过1553B总线从数管获得同步信号对应的整秒时刻信息,并分别向2台星相机转发;2台星相机根据GPS同步信号校准自身的时间基准,以此时间基准控制每帧图像的曝光中心时刻,实现星相机与卫星平台的时间同步。
传统的时间同步方法是:星相机根据收到的同步信号启动自身的本地计时时钟计数,将时间差记录下来作为图像辅助数据传递到地面[7]。这种方法只是记录时间差,不对自身的时间基准进行校正,因此存在较大系统误差,已不能满足目前高精度影像定位使用要求。为了解决这个问题,本文提出高精度校时计时方法,通过控制同步器和2台星相机准确校正各自时钟并精确计时,最终使星上时钟、控制同步器设备时钟及每台星相机的设备时钟时刻重合,以实现高精度时间同步。其具体实现包括4个步骤。
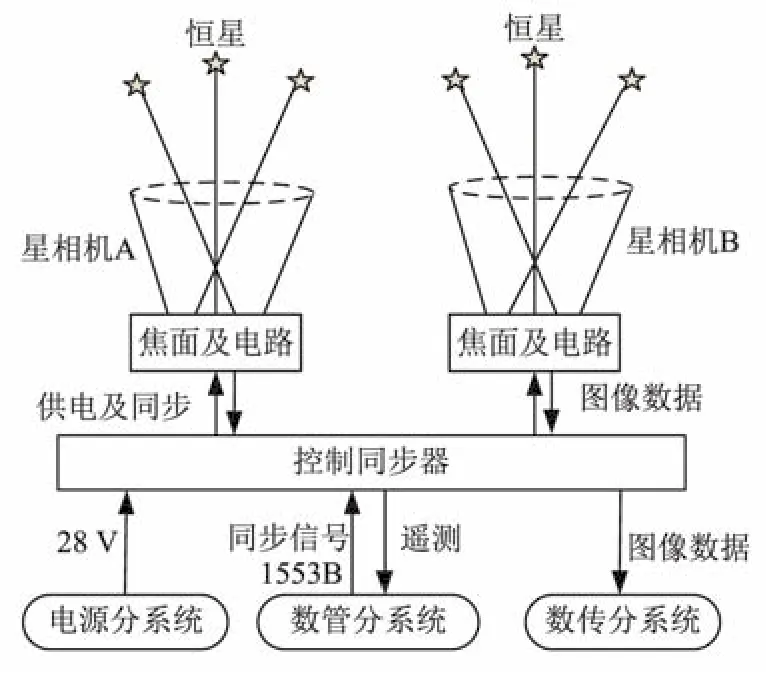
图1 系统组成Fig.1 System composition
(1)接收卫星GPS同步信号和整秒时刻信息。控制同步器接收卫星GPS信号,形式为RS422差分电压信号[8],同时从1553B总线接收同步信号对应的整秒时刻信息,两者的时序关系如图2所示。
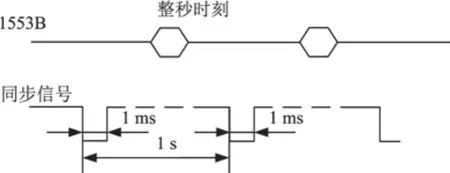
图2 秒脉冲信号接口时序Fig.2 Time sequence of second pulse signal interface
(2)控制同步器校正自身设备时标(秒脉冲)并发送给星相机。控制同步器根据接收的GPS同步信号下降沿校正自身设备时标,使自身设备时标与卫星时间基准严格对准,对准精度优于500 ns,并将该时间基准通过低压差分信号(LVDS)接口发送给2台星相机,同时用本地时钟精确记录校正后的时标和卫星时间基准之间的时间差。
(3)星相机接收控制同步器的同步信号并实现与其同步。每台星相机根据接收到的时间基准上升沿校正自身设备时标,使自身设备时标与收到的时间基准严格对准,对准精度优于500 ns;同时,利用本地时钟精确记录校正后的设备时标和接收到的时间基准之间的时间差,校正后的设备时标作为每台星相机曝光时刻的计时基准。
(4)星相机在上述计时基准控制曝光时间并将星图及辅助数据下传至地面。星相机最终将该计时基准下的本地时钟精确记录的曝光时刻信息作为时标信息连同四元数和图像信息发送给数传。
上述4个步骤中,第2步和第3步是影响最终时间同步精度的关键,也是该方法的核心所在,详细叙述如下。
1.1 控制同步器校正自身设备时钟并发送至星相机
GPS接收机正常锁定,数管发送校时指令,控制同步器完成初始化后(接收数管ON指令后不晚于5 s)形成1 Hz频率的本地设备时钟,在1 s内等待卫星同步信号下降沿,如果1 s内接收到卫星同步信号下降沿,则控制同步器按照时标的下一个下降沿使控制同步器本地设备时钟和卫星同步信号重合,在下一次成功接收到卫星同步信号时,卫星和控制同步器的时钟重合,作为本地计时器的整秒时刻标志,同时控制同步器从1553B总线接收该整秒信号的时间码被记录下来。因为卫星和控制同步器的时钟不可能做到完全重合,因此控制同步器软件使用另一个100 MHz高频率时钟实时记录校正后本地设备时钟和卫星同步信号之间的延时Δt3(如图3所示),将其编入辅助数据,从数传接口输出。控制同步器本地时钟与卫星时钟的同步结束后,控制同步器会一直监测卫星同步信号周期并自动按照每次测试的结果校正本地设备时钟。
从总线遥控指令“星相机工作模式”执行时刻开始,控制同步器为2台星相机形成时标。为了让星相机更准确的识别时标,控制同步器向星相机发送同步序列0XBB(频率100 MHz),时标由4个前后相继的字节0X00进行标记,如图3所示。
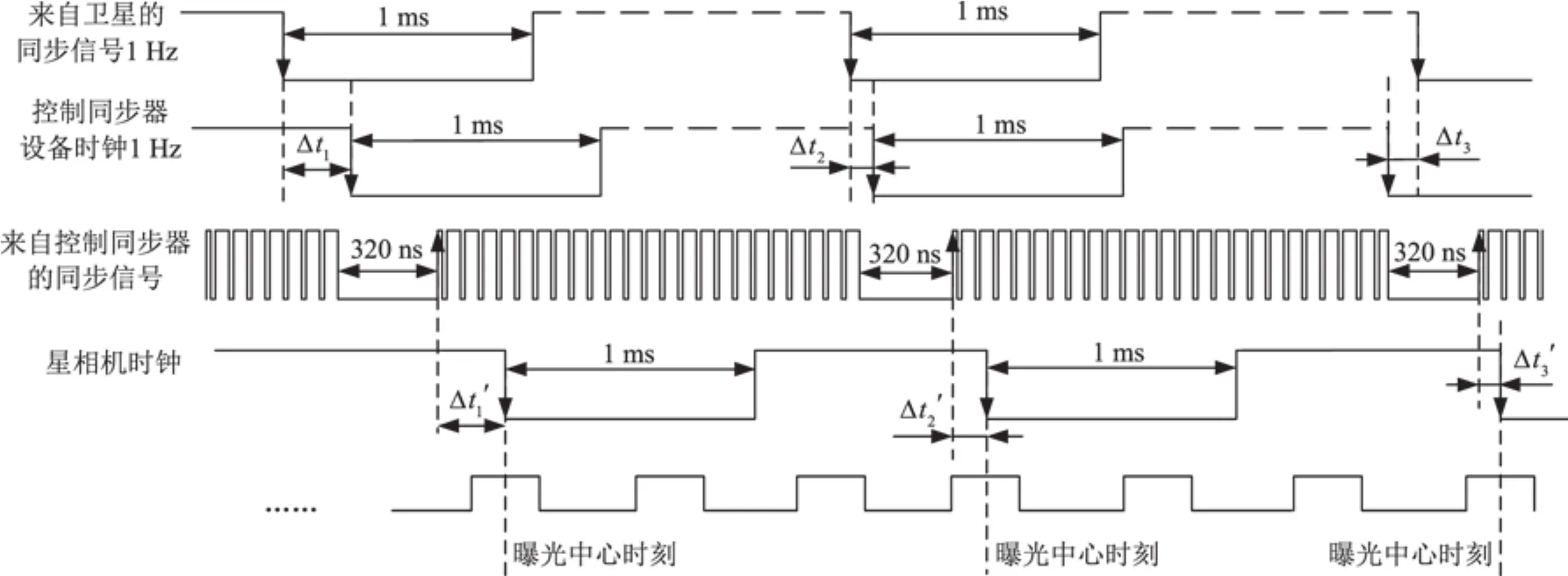
图3 校时计时时序Fig.3 Timing sequence of time correction and calculation
1.2 星相机与控制同步器时钟同步设计
星相机初始化后按照内部时钟工作,形成频率为1 Hz的设备时标。在接收到控制同步器发送的“开始信息交换”指令后,星相机执行与控制同步器的时间同步。星相机接收到0XBB,0X00,0X00和0X00,0X00,0XBB这2个同步序列,按照第2个同步序列的最后一个字节的接收时刻进行时间同步,在下一次接收到控制同步器时标后,星相机和控制同步器的时钟实现重合。由于不可能完全重合,因此星相机软件使用另一个100 MHz高频率时钟实时记录校正后的设备时标信号和接收到的同步信号之间的延时Δt′3(如图3所示),将其编入辅助数据,从数传接口输出。星相机与控制同步器的时间同步结束后,会一直监测控制同步器同步接口时标周期,并自动按照每次测试的结果校正设备时钟,具体如下。①星相机初始化完成后即生成自身的设备时钟。此时,星相机准备接收控制同步器发出的时标信号,默认接收主通道时标(为提高可靠性,同步接口设置为主备通道)。②之后的每秒,星相机均按照图4所示的流程完成时间同步。其中,对外部同步信号检测、通道选择及设备同步时钟校正是3个关键环节。
1)外部同步信号检测
同步成功后,星相机预计下一秒时标到来的时刻,在该时刻前较短的时间内才开启外部时标检测,在该时刻后较短的时间内再关闭外部时标检测。由于开启检测的时间较短,因此期间出现假时标信号的概率降低,从而减少时标信号干扰的影响,提高容错率。
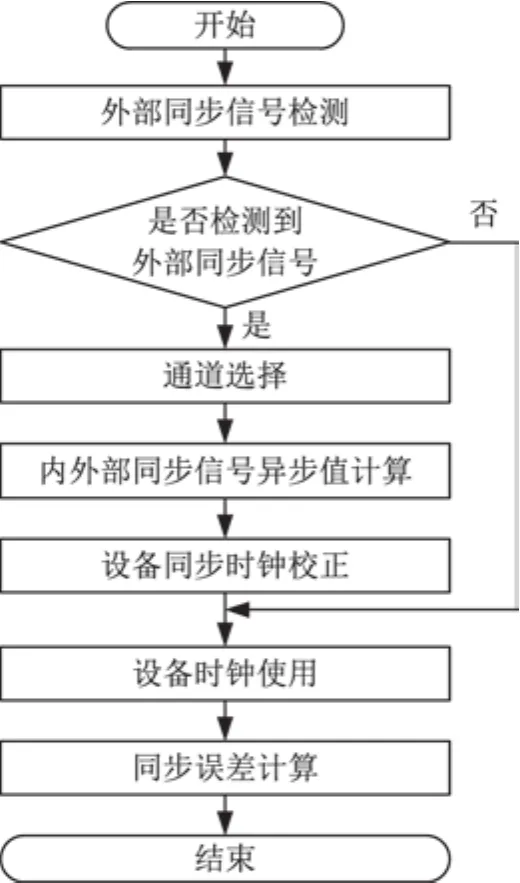
图4 时间同步方法流程Fig.4 Time synchronization method flow
2)通道选择
星相机校时设置主备通道外部时标检测切换功能。如果星相机当前使用主通道作为外部时标源,在上文提到的设定开启外部时标检测时间内,主通道未接收到信号,而备份通道有时标信号输入,则下一秒星相机直接切换到备份通道作为时标源。通过快速切换通道,可以提高星相机与星上时标对准的稳定性。即使主备通道时标源均出现异常,星相机也可按照之前同步的自身设备时钟工作。因此,在失去星上时标某一主备通道或其都丢失的情况下,仍可较大程度地保持时钟的准确性。
3)同步时钟校正
经过内外部同步信号异步值计算,得到当前秒的设备时钟与外部时标间的同步差值和符号,接下来要进行同步时钟校正。直接在下一秒将同步差一次性补偿,即单间隔补偿方式(见图5(a)),可以达到同步效果,但是设备时钟跨度较大,由于设备时钟是设备工作的时钟基准,这种方式容易造成时序异常,引发后续模块的竞争冒险。为此,本文采用多间隔补偿方式(见图5(b)),将设备时钟均分为几步挪动,使时标过渡更平稳,对后续时序的影响更小。具体实现方法是借助时间存储表得到时间校正步数N和校正步距(校正步距等于同步差的绝对值除以N的整数值),以及被除后的余数。在计算出同步差后,下一秒分N步移动内部时钟,每步移动的校正步距余数放在该秒的末端。如果非同步值小于20 ns,则不需要调整。
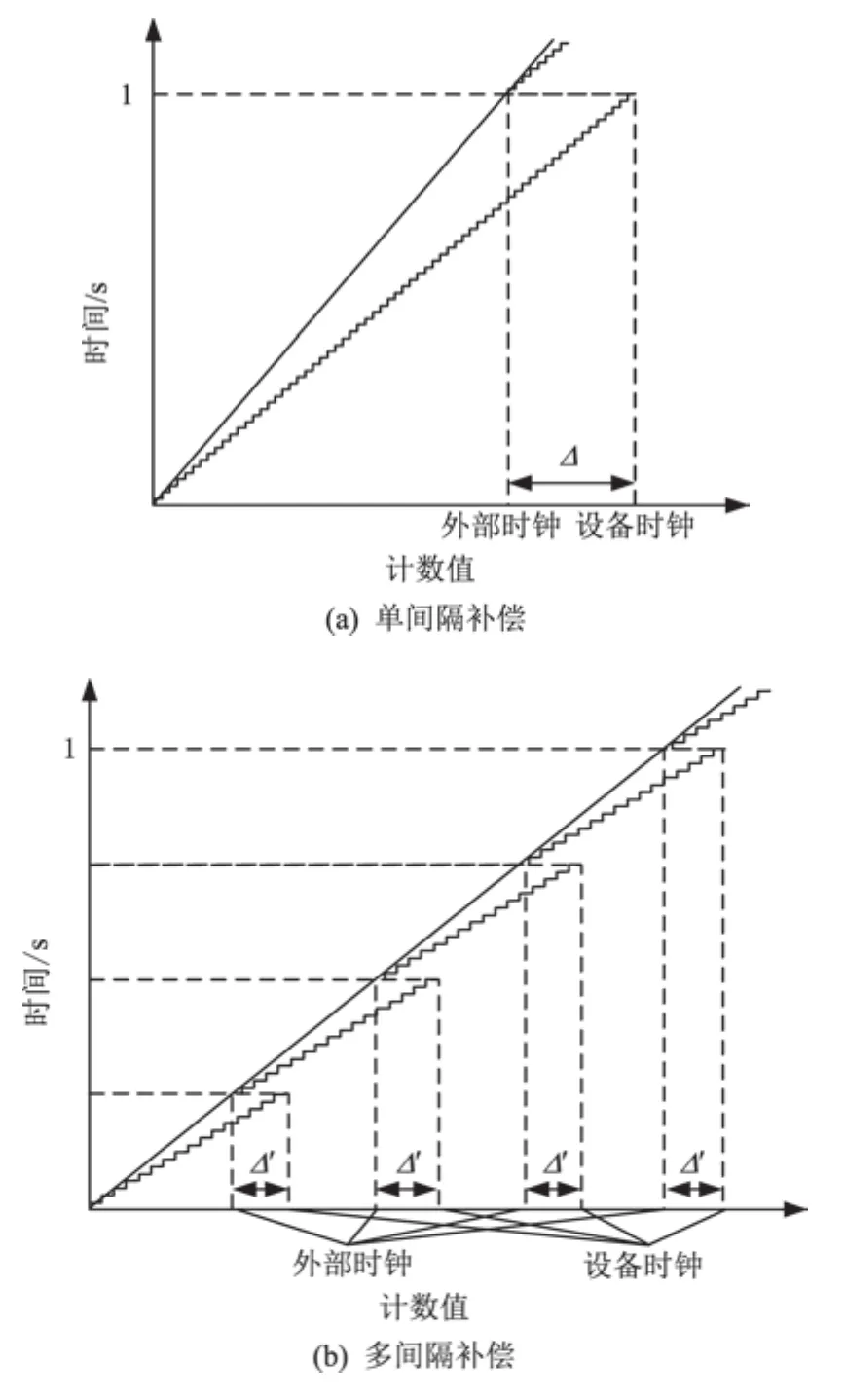
图5 同步补偿方式Fig.5 Synchronous compensation mode
2 校时计时方法验证
星相机时间信息和星上时间之间的误差包括系统误差和随机误差。
2.1 系统误差
如前所述,星相机采用同步信号校时计时方法实现与星上时间同步,按照同步信号的传递路径,将延时(即误差)分解为:①在控制同步器中的延时,②从控制同步器输出到星相机接收的延时,③在星相机中的延时,具体如图6所示。

图6 星相机时间同步误差传递路径Fig.6 Time synchronization error transfer path of star camera
(1)卫星秒脉冲同步信号输入控制同步器后,软件对其进行判读,识别出标志整秒时刻的信号脉冲下降沿。软件将本地用于计时的计数器时钟(频率1 Hz)的某一个时钟沿与卫星同步信号下降沿对应起来,作为本地计时器的整秒时刻标志。同时,软件使用另一频率高于计数器时钟频率的时钟信号(100 MHz),实时检测卫星同步信号和本地计时器对整秒时刻标志的延时,将其编入辅助数据,从数传接口输出。实测该环节的延时在10-7s量级上。该环节延时t1(单位:ns)为

式中:a为控制同步器辅助信息数据中信息段ext-Clock Lates的最大值;20 ns为控制同步器输出端时标的硬件处理时间。
(2)控制同步器向星相机输出的同步信号为调制后的连续脉冲信号,每经过连续低电平之后的第1个上升沿标志整秒时刻,如图7所示。t2即为这一环节的延时,设计值为320 ns,用示波器一次性测得。
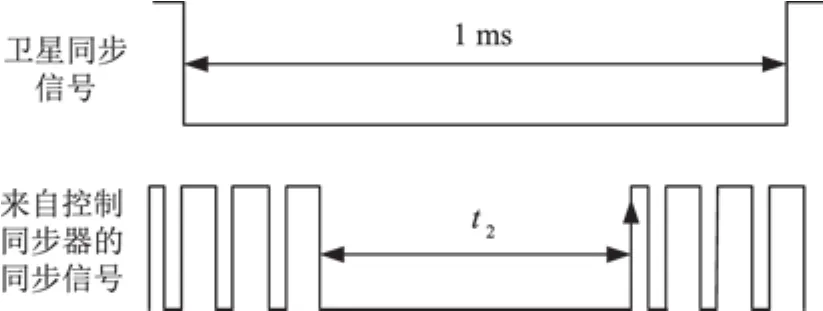
图7 控制同步器输出的同步信号Fig.7 Synchronization signal from control synchronizer
(3)控制同步器的同步信号输入星相机后,软件对其进行判读,识别出标志整秒时刻的信号脉冲上升沿。软件将本地用于计时的计数器时钟(频率1 Hz)的某一个时钟沿与同步信号上升沿对应起来,作为本地计时器的整秒时刻标志。同时,软件使用另一频率高于计数器时钟频率的时钟信号(100 MHz),实时检测同步信号和本地计时器对整秒时刻标志的延时,将其编入辅助数据,从数传接口输出。实测该环节的延时在10-7s量级上。该环节延时t3(单位:ns)为

式中:b为星相机辅助信息数据中信息段Async1最大值;40 ns为星相机时标的硬件处理时间。
最终,系统误差t(单位:ns)为

2.2 随机误差
控制同步器和星相机均装有用于本地计时的计数器时钟,频率均为1 Hz。控制同步器本地计时的计数器时钟每秒都会与卫星同步信号进行同步操作,星相机的本地计时的计数器时钟每秒也会与来自控制同步器的同步信号进行同步操作。
由分析可知,控制同步器相对于卫星同步信号延时t1和星相机相对于控制同步器同步信号的延时t3均用本地100 MHz的时钟计数来检测,计算时以10 ns为周期时间,随机误差就是其实际周期和10 ns的精确误差,误差相关因素是由本地时钟产生的(例如晶振随机频率抖动),具体分析如下。
(1)100 MHz时钟的抖动:根据器件手册,此晶振时钟抖动为5 ps,在10-12s量级上,数值本身很小。
(2)extClock Lates锁存的是控制同步器和卫星同步信号之间的计数器差值,Async1锁存的是星相机和控制同步器同步信号之间的计数器差值。①产生的参考来源相同,控制同步器同步信号计数器数值和接收的卫星同步信号计数器数值的参考依据,都是本地100 MHz的时钟计数器数值,控制同步器辅助数据中锁存的extClock Lates是两者的差值;星相机同步信号计数器数值和控制同步器计数器数值的参考时钟,也都是本地100 MHz的时钟计数器数值,星相机辅助数据中锁存的Async1是两者的差值。②extClock Lates和Async1均为两者相减,消除了本地时钟的频率漂移影响。
综上所述,随机误差远小于10-12s,可以忽略不计。
2.3 同步误差测量结果
对2台星相机的时间同步精度各进行8次测试,过程如下。①从总线遥控指令“星相机工作模式”开始记时10 min,之后读取辅助数据extClock-Lates和Async1,取其中的最大值。②根据式(1)和式(2)计算t1,t3,然后根据式(3)计算得到总误差t,其中t2为固定值320 ns(实际值也通过示波器进行了测试)。星相机A和B的具体结果见表1和表2。由测试结果可知,同步误差最大值为880 ns,满足优于5μs的指标要求。
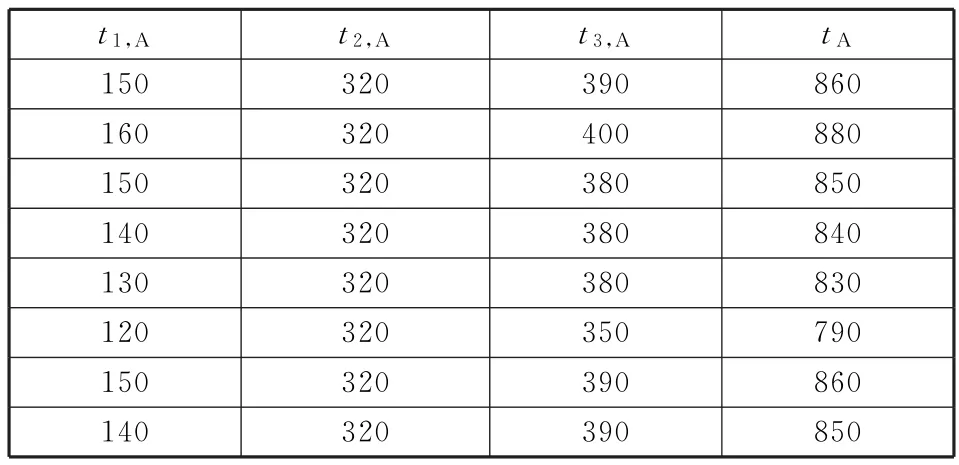
表1 星相机A同步误差测试结果Table 1 Test results of synchronization error of star camera A ns
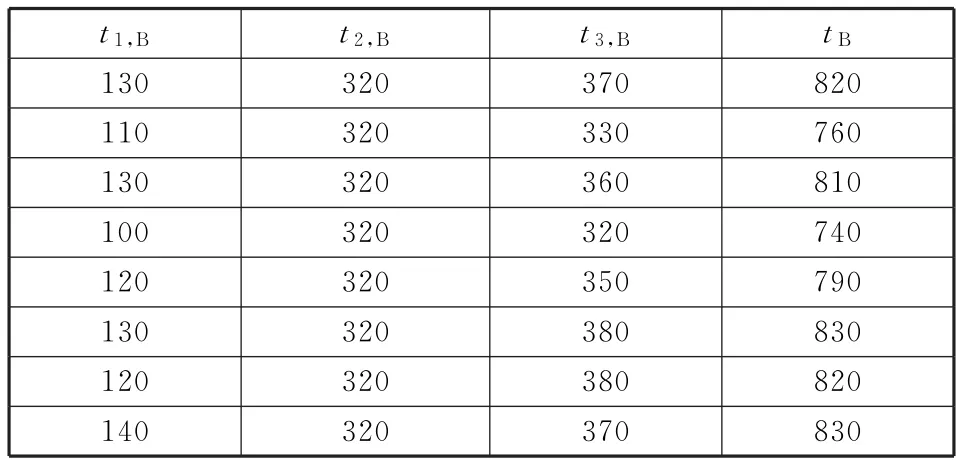
表2 星相机B同步误差测试结果Table 2 Test results of synchronization error of star camera B ns
卫星同步信号和控制同步器同步信号示波见图8。其中,147.2 ns为前文所述的星相机A的t1(即t1,A),与表1的数据吻合,随后的连续低电平即为前文所述的t2(即t2,A),从而证实了辅助数据时间信息的正确性。
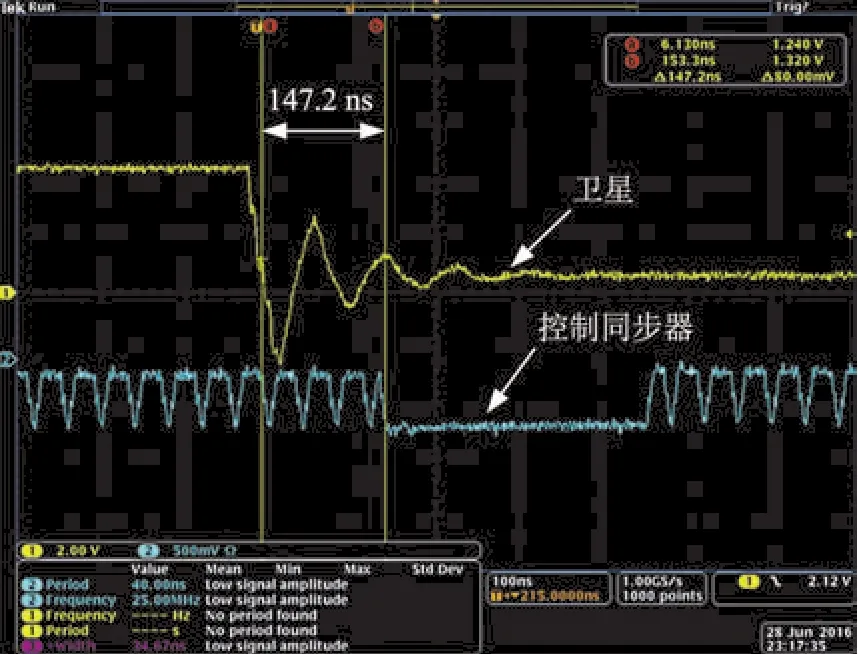
图8 卫星同步信号和控制同步器同步信号示波Fig.8 Oscillogram of satellite synchronization signal and control synchronizer synchronization signal
2.4 同步误差对图像定位精度的影响
将星相机同步误差880 ns和改进之前的同步误差50μs分别作为输入条件,利用相机参数、轨道数据、姿态数据、星相机数据、图像数据及其他辅助数据,根据前方交会原理[9]建立成像几何模型,计算图像几何位置,利用控制点数据对图像几何定位精度进行评价,验证星相机同步误差减小对图像定位精度的提升作用。结果表明:图像定位平面精度提高约10%,高程精度提高约15%,对于越来越高的测绘定位精度具有显著的应用价值。
3 结束语
传统星相机时间同步方法,由于只记时不对自身的时钟进行校正,存在较大的系统误差,不能满足高图像定位精度使用要求。为此,本文提出了一种高精度校时计时方法,通过控制同步器和2台星相机准确校正各自时钟并精确计时,最终使星上时钟、控制同步器设备时钟及每台星相机的设备时钟重合,实现高精度时标同步。对测试误差进行分析和验证,最终实现与卫星同步信号的时间同步精度优于1μs,从而可提高测绘定位精度。后续将对该设计方法进行性能优化,以进一步提高计时精度。